基于6-UCU型平台并联机床的轨迹时间优化
2020-12-14严昊吴建民
严昊 吴建民

摘 要: 本文针对基于6-UCU型Stewart平台的并联机床提出了一种轨迹时间优化方法。建立该运动平台的运动学逆解模型。通过三次多项式插值对上平台的轨迹点进行插值,通过反解模型求出各个驱动臂对应的位移。建立时间优化的模型,使用遗传算法结合五次多项式插值对轨迹点之间的速度,加速度进行求解。计算得出优化后的运行时间与未优化前对比优化了14.9%。最后将得到的加速度导入到ADMAS模型中进行仿真验证,结果表明该轨迹运行平稳,仿真测量的驱动臂位移与计算得出无明显差别。
關键词: Stewart平台;遗传算法;轨迹优化
中图分类号: TP249 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.09.030
【Abstract】: This paper proposes a trajectory time optimization method for parallel machine tools based on the 6-UCU Stewart platform. In this paper, the inverse kinematics model of the motion platform was established firstly. The trajectory points of the upper platform are interpolated by cubic polynomial interpolation, and the corresponding displacement of each driving arm is obtained by the inverse solution model. Establish a time-optimized model and use genetic algorithm combined with fifth-degree polynomial interpolation to solve the velocity and acceleration between trajectory points. It is calculated that the optimized running time is optimized by 14.9% compared with that before the optimization. Finally, the obtained acceleration was imported into the ADMAS model for simulation verification. The results show that the trajectory runs smoothly, and the measured displacement of the driving arm is not significantly different from the calculation.
【Key words】: Stewart platform; Genetic algorithm; Trajectory optimization
0 引言
随着机器人技术的进步,各种各样的机器人投入到了生产中取代人力进行繁重、重复的人力劳动。基于这种现状,一些专家学者着手研究对机器人的运行轨迹进行时间的优化,来进一步提高生产效率。Geering[1]等人利用Pontryagin最小化原理,提出了一种机器人最优时间的轨迹规划方法。Cong M[2]提出了一种基于模糊遗传算法,基于速度和加速度的约束条件下,对轨迹运行时间进行优化。施祥玲等[3]以从时间、能耗、冲击三方面考虑对串联机械臂,建立五次非均匀有理B样条模型,采用NSGA-II算法求解实现了有效的多目标优化。王宇[4]使用三次样条插值对3R串联机器人进行估计规划,并提出了一种基于遗传算法的时间优化方法。
本文以6-UCU型Stewart并联机构为研究对象,针对其在并联机床的应用场景,在保证其平稳运行的前提下,对其运行轨迹进行时间上的优化。
1 Stewart反解数学模型
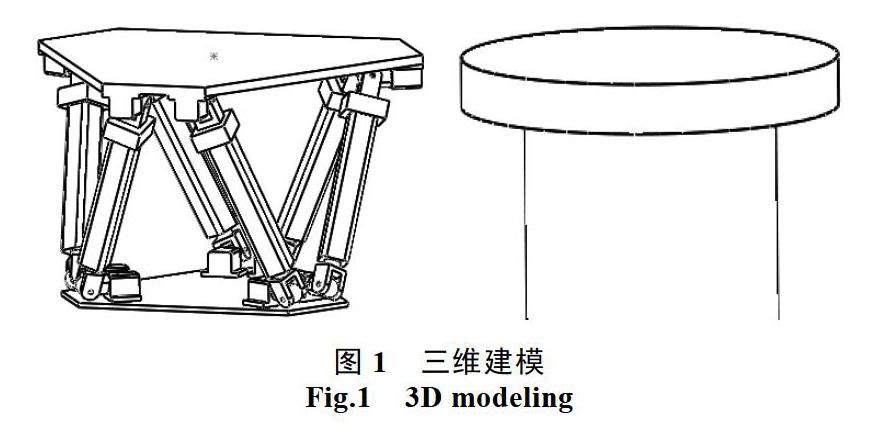
使用SolidWorks建立六自由度并联机床的三维模型如图1所示,该并联机床由伸缩杆、刀具、主轴和机架组成,机床上下平台分为两层,六根可变长杆件通过虎克铰链与上下平台相连。机架固定在地面,通过伺服电机驱动六根伸缩杆,实现动平台在空间的移动和转动,从而得到动平台的不同位姿。主轴部件固定在动平台上,带动刀具旋转,实现对工件切削的加工要求。
Stewart平台的运动学的位置分析包括正解和逆解,正解是已知关节变量求解刀具在空间坐标系中的位置,逆解是已知刀具位置求解各关节的变量。对于机床操控中需要对动平台的运动轨迹进行规划,再利用运动学位置反解求得各个驱动杆的位移变化,将驱动杆的位移变化输入上位机完成工件的加工。
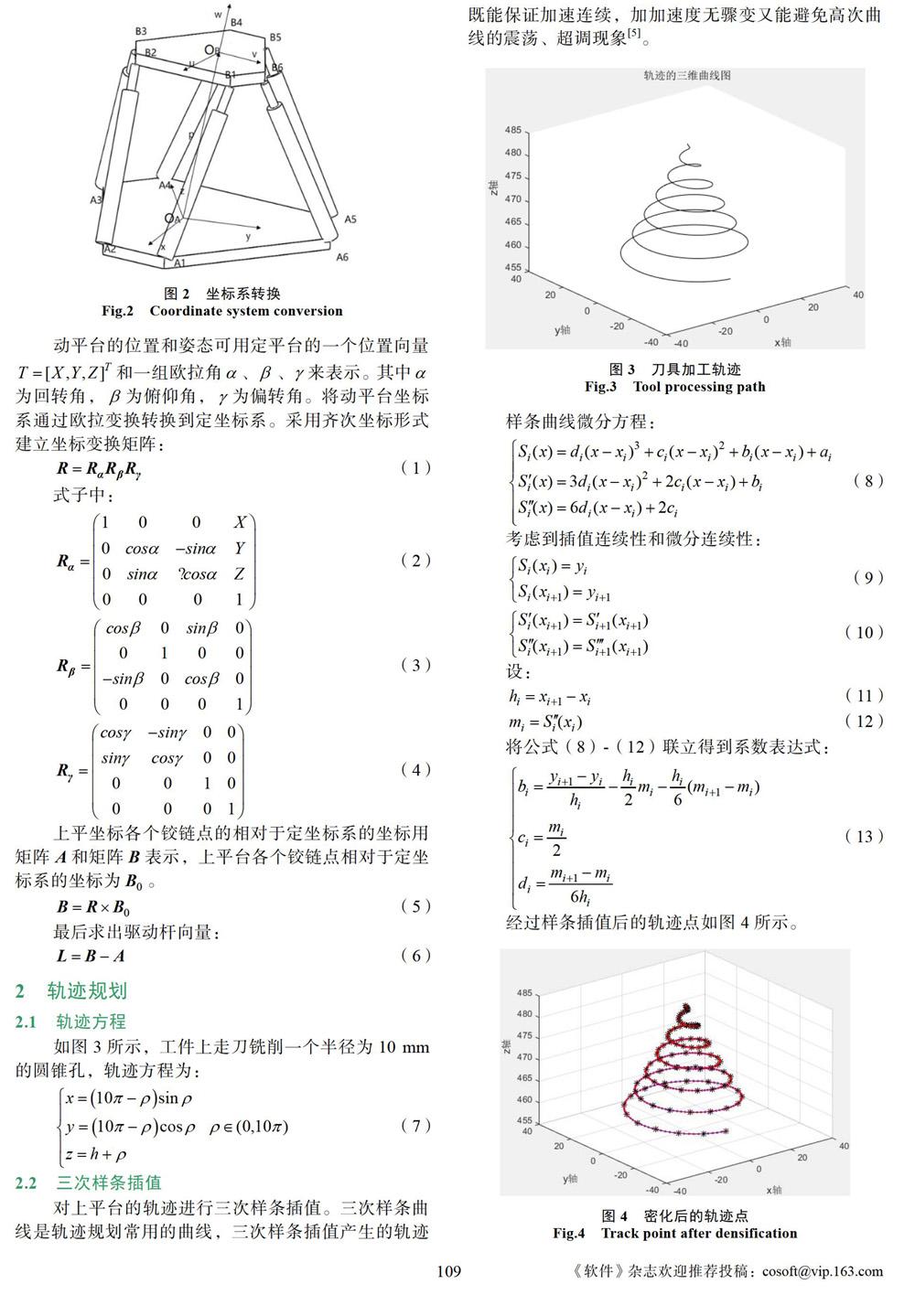
动平台的位置和姿态可用定平台的一个位置向量和一组欧拉角、、来表示。其中为回转角,为俯仰角,为偏转角。将动平台坐标系通过欧拉变换转换到定坐标系。采用齐次坐标形式建立坐标变换矩阵:
2 轨迹规划
2.1 轨迹方程
如图3所示,工件上走刀铣削一个半径为10 mm的圆锥孔,轨迹方程为:
2.2 三次样条插值
对上平台的轨迹进行三次样条插值。三次样条曲线是轨迹规划常用的曲线,三次样条插值产生的轨迹既能保证加速连续,加加速度无骤变又能避免高次曲线的震荡、超调现象[5]。
2.3 五次五多项式插值
多项式插值是直线插值的常用方法,多项式插值就是已知一个函数,如果给定在区间上的个点,已知在这些点的函数值,求得一个次数不超过的多项式函数的过程[5]。建立线性方程组:
3 轨迹优化
3.1 构造目标函数
给上平台规划一段轨迹,将该轨迹离散为若干个离散点,相邻轨迹点形成最小轨迹。该轨迹的实际运行时间是若干个最小轨迹的运行时间的和。对轨迹运行时间进行优化建立的目标函数是让所有轨迹运行时间的总和最小,如式(18)所示:
3.2 约束函数
约束条件主要有动力学约束条件、机构的结构约束条件和其他约束条件。在机器人运动过程中,在保证运行速度的同时还需要避免出现加速度骤变对结构造成冲击,以及速度和加速在整个系统的允许范围内。相邻两个轨迹点之间就是一段轨迹,共有段轨迹,6个驱动臂在不同轨迹区间所对应的速度为、加速度为,约束方程如下所示:
已经对五次多项式中各个节点区间的速度,加速度,加加速度进行了推导,结合五次多项式插值计算可得到优化目标的约束函数为:
参考一些Stewart平台已经投入生产和使用的产品的参数和设计。驱动臂一般使用伺服电机驱动,考虑该机构的结构参数,选取二级电机作为驱动电机。参照上海格吉电机科技有限公司生产的SEC75-R005型直角电动缸,采用英威特SV-ML06-0R4G-2-1A0伺服电机,其额定功率1.5 KW,额定电压220 V,额定转速3000 r/min,最大输出力15 KN,速度83 mm/s。
对于轨迹进行时间上优化时,速度和加速是未知的。对于轨迹实际运行时间由每段轨迹点所分配的速度和加速度共同决定。正常轨迹规划时,出于轨迹平滑的考虑需要给机构留有减速的冗余,往往速度和加速度不能达到既定的阈值,电机提速过快会造成程序报错。出于实际应用的考虑,将非优化环节下速度和加速度限定在最大输出速度和加速度的80%。将优化有轨迹的运行时间与全程在稳定速度和加速度情况下轨迹的运行时间进行对比。
本文的优化考虑到驱动臂所做的为直线运动,驱动臂所要考虑的减速区域为驱动臂做往复运动时的轨迹段,在此轨迹段将速度和加速度设定为平稳运行状态,将做单一变化时的驱动臂的速度和加速度设为极限状态。考虑到驱动臂的协同性,每个驱动臂在同一轨迹时间运行的时间应该相等,所以应该选取每段轨迹区间内最长的那个机械臂的运行时间作为该段轨迹的运行时间。综合考虑这两种因素选取在该轨迹段运行时间最长的驱动臂的运行时间作为该轨迹段的最终运行时间,其他驱动臂的速度、加速度按照该轨迹段的运行时间进行计算求解,即:
3.3 模型求解
该模型是一个非线性规划问题求解问题,非线性目标求解在已搭建的数学模型中速度、加速度、加加速度的限制作为制约函数,在求解非线性方程组的算法中遗传算法具有良好的全局搜索能力,可以快速地将解空间中的全体解搜索出,而不会陷入局部最优解的快速下降陷阱[6]。并且利用它的内在并行性,可以方便地进行分布式计算,加快求解速度。求解流程图如图5所示。
4 仿真验证
使用ADAMS搭建平台的动力学模型,将优化得到的加速度样条导入到模型中[7],在模型中建立测量,将测量采集到的位移运行数据与轨迹规划的运行数据对比。
如图8所示各个驱动臂的位移变化图和轨迹规划得到的驱动杆的位移变化量一致,优化是从时间上进行优化,在驱动臂做小位移往复运动时,驱动臂依旧能保持高速运动。
5 结论
本文结合实际生产对Stewart平台的运动轨迹进行了优化。首先对上平台的运动轨迹进行了规划通过三次样条插值对轨迹点进行密化,保证轨迹的平滑性,通过运动学反解模型对轨迹点求解对应的关节位置。
建立优化的数学模型,通过遗传算法与五次多项式插值相结合解析出了时间最优时各轨迹段的速度和加速度,时间优化后轨迹运行平稳。最后通过仿真验证了该优化结果。
参考文献
[1]Geering H, Guzzella L, Hepner S, et al. Time-optimaland motions of robots in assembly tasks[C]. IEEE Conference on Decision and Control. IEEE, 1985: 982-989.
[2]Gao M, Ding P, Yang Y. Time-Optimal Trajectory Planning of Industrial Robots Based on Particle Swarm Optimization. Fifth International Conference on Instrumentation and Mea surement,Computer, Communication and Control. IEEE, 2016: 1934- 1939.
[3]施祥玲, 方紅根, 郭为忠. 基于五次NURBS的机械臂时间-能量-平滑性多目标轨迹优化[J]. 机械设计与研究, 2017, 33(01): 12-16.
[4]王宇. 基于时间最优的3R串联机械手轨迹规划及仿真的研究[D]. 沈阳工业大学, 2018.
[5]陈爱波, 陈五一. 基于五次多项式插值的大惯量弱刚性回转系统的启动速度控制[J]. 组合机床与自动化加工技术, 2016(02): 105-107.
[6]卓金武. MATLAB在数学建模中的应用[M]. 第二版, 北京: 航空航天大学出版社, 2014: 76-77.
[7]宋少云, 尹芳. ADAMS在机械设计中的应用[M], 北京: 国防工业出版社, 2015: 73-74.
