一种智能饮食护理机器人研究
2020-12-14许朋喻洪流石萍
许朋 喻洪流 石萍

摘 要: 针对目前饮食护理机器人操作复杂、价格昂贵的缺点,设计了一款新型的智能饮食护理机器人,并且通过对其运动特性的分析,验证设计的合理性。首先,根据模块化设计原理,进行总体结构设计;然后,利用SOLIDWORKS进行三维建模,并运用SOLIDWORKS Motion对机器人运动餐碗旋转运动、升降部件升降运动、悬臂部件伸缩旋转联动运动进行运动仿真,仿真的结果发现运动餐勺在饮食护理过程中会有抖动现象;之后,本文试制了试验样机,并对样机进行了硬件去抖和软件去抖对比实验,实验结果证实了机器人在饮食护理过程中采用硬件去抖和软件去抖结合的方法,运动更加平稳。该智能饮食护理机器人设计合理、操作简单,能够帮助上肢功能障碍者进行饮食。
关键词: 饮食护理;机器人;结构设计;运动仿真
中图分类号: TP242.6 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.09.015
本文著录格式:许朋,喻洪流,石萍. 一种智能饮食护理机器人研究[J]. 软件,2020,41(09):5659
【Abstract】: Considering the smart feeding assistive robots disadvantages as complicated and expensive operation, a new type of rotary feeding assistive robot was designed, then, its kinematic characteristics were analyzed and various degrees of freedom torque were calculated to verify the rationality of the design. Firstly, the overall structure of the robot was designed under the modular design principle. Then, the robot's 3D model was established by SOLIDWORKS, and the kinematics simulations of the motion of the rotary motion of the moving plate, the lifting motion of the lifting part, and the telescopic—rotating motion of the cantilever part were done with SOLIDWORKS Motion respectively. The results of the simulation show that the dithering of the moving spoons in the process of dietary nursing. After that, the experimental prototype was trial-produced in this paper, and a comparison experiment was carried out on the hardware de-shake and software de-shake. The experimental results confirmed that the robot adopted the combination of hardware de-shake and software de-shake in the diet care process, and the movement was more stable. The rotary feeding assistive robot is designed reasonably and operated easily, and can help people with upper limb dysfunction to eat.
【Key words】: Feeding assistive; Robot; Physical design; Motion simulation
0 引言
根据国家统计局公布数据[1],截至2018年底,60周岁及以上人口24949万人,占总人口的17.9%,其中65周岁及以上人口16658万人,占总人口的11.9%。预计到2050年前后,老年人口占比将达34.9%,全国老龄化比例呈直线上升趋势[2]。此外,由脊髓损伤、脑损伤、脑中风以及引发的后遗症、神经损伤和肌肉萎缩病变引起的功能障碍数量逐年增加。随着社会的快速发展,工业生产事故,交通事故,自然灾害等引起的肢体残疾患者人数也逐年增加。随之带来的问题就是失能老年人和残疾人的有效护理和护理所需人力资源的紧缺之间的矛盾日益加剧[3]。饮食护理又是最重要的日常活动,对于上肢活动受限的老年人和上肢有功能障碍的人,通常是由病人家属照顾或专业护士的帮助完成饮食护理[4]。但这种方式不仅效率低,需要消耗大量的人力,费用高昂,对于一般经济状况的家庭来说很难负担得起,并且如果护理人员和病人之间的沟通不良还会引起冲突[5]。因此,饮食护理机器人的研究和应用,对我国康复医疗水平的提高及多学科交叉研究的进步都具有重要意义。
目前国内外饮食护理机器人结构形式设计方案按照餐碗的位置是否固定,饮食护理机器人可以分为两种类型[6]:固定餐碗型和运动餐碗型。固定餐碗型饮食护理机器人大多采用固定的餐桌、餐碗或餐盘加自由度较多(5DOF或6DOF)的助餐机械手的形式构成,其中比较典型的有以下几种。英国Mike Topping公司研制的Handy l[7]使用了一个5自由度的机械臂和三个可拆卸的托盘来满足使用者的不同使用需求。激光扫描系统选取食物,利用机械臂盛取食物并送至患者嘴边,但激光扫描选取食物时间长。美国Sammons Preston公司生产的Winsford Self-Feeder[8]采用两个机械臂共同辅助进餐,其中一个机械臂装有勺子,另一个机械臂的作用是将盘子里的食物推到勺子上。就餐时患者通过触碰下颌开关,机械臂运作辅助患者进餐。但两个机械臂控制难度大,机械臂盛取食物时稳定性差,存在抖动,易出现食物洒落的情况。日本Secom公司研发的My Spoon[9-10]由一个固定于盘底的6自由度机械臂和一个固定餐碗构成。用户可通过颌动,脚动和手动三种方式操控。My Spoon通过一个勺子和一个叉子共同配合来抓取食物。但由于售价很高,难以走进普通家庭。综上所述固定餐碗型的饮食护理机器人结构相對简单,取食方便,但由于机械臂自由度较多,设计难度大难以控制,并且价格很高,普通家庭难以负担。在此情况下,产生了如今应用较为广泛的运动餐碗型饮食护理机器人。
运动餐碗型通常为旋转(移动)的餐桌、餐碗或餐盘加自由度较少(2DOF或3DOF)的饮食护理机械手的形式构成。运动餐碗型的机器人通过餐桌或餐碗的旋转大大减少了机械臂的自由度,从而弥补了机械臂的设计不足。其中比较典型的有以下几种。美国Mealtime Partner公司研制的dining system[11-12]餐勺的运动轨迹固定,餐勺有旋转和伸缩两个自由度。三个餐碗分别装不同的食物,通过餐碗的转动用户可以选择不同的食物。但dining system整体体积和重量较大,不方便用户使用。海军工程大学所研制的可控式用餐机[13-14],它采用一个驱动电机,利用连杆机构的原理来驱动整个机械臂。机械臂只有一个自由度,无空间旋转自由度,利用餐盘和餐桌的同时旋转来弥补手臂结构设计的缺陷。餐勺在餐盘中的取餐位置固定,通过脚踏按钮来操作。但该机器人自由度少,智能化程度较低,只能完成在特定环境下的简单助餐,还需进一步完善才能使用。哈尔滨工程大学研制的MY TABLE[15-16]。由一个旋转餐桌、一个2自由度的机械臂组成,机械臂可以实现旋转和上升功能,利用餐桌的旋转来弥补机械臂自由度不足的缺陷。它有3种人机交互操作模式可供选择,分别为头戴鼠标、脚踏开关以及语音识别。进餐时,患者只需坐在餐桌前,选择一种操控方式就可以帮助患者进餐了。由于该机器人还处于功能样机阶段,体积比较大,且不易拆卸,故还需要改进以实现产品化。
综合比较国内外现有的各类型饮食护理机器人,本文结合固定餐碗型和运动餐碗型各自的优点,采用模块化设计原理,设计了一款智能饮食护理机器人。通过智能的运动餐碗简化机械臂复杂的运动,设定固定的勺子运动轨迹提高饮食护理效率,同时简化复杂的机械结构降低成本,减小体积和重量,提高运动的平稳性,使饮食护理机器人更能够被普通家庭接受。
1 饮食护理机器人机械结构设计
1.1 机械结构总体设计
本文所设计的智能饮食护理机器人包括转盘升降部件、伸缩旋转部件、运动餐勺和4个可拆卸的餐碗构成,如下图1所示。该饮食护理机器人属于运动餐碗型的饮食护理机器人,运动餐碗上有4个碗,每个碗里装着不同食物,餐碗转动时用餐者可以选择喜欢的食物,升降装置将悬臂升高到合适的高度,然后悬臂将勺子先逆时针旋转90°,然后再顺时针旋转90°,将勺子推送到旋转餐碗内,勺子盛取食物,悬臂推动勺子向前运动,将食物送到用餐者嘴边,待用餐者吃完勺子里食物后,悬臂将勺子向后伸缩,回到初始位置,完成一个饮食护理周期运动。
1.2 转盘升降部件设计
运动餐盒通过旋转,用餐者可以根据自己喜欢的食物进行选择。运动餐盒包括4只餐碗、运动餐盒上可以悬挂餐盒的支撑架以及底盘。旋转的餐盘可以360°旋转,运动餐盒的碗采用不规则的形状,每个碗旋转角度是90°。碗的一侧设置刮菜挡板,当取菜结束后,转盘部件自动来回转动10°,刮掉多余的饭菜,避免一次取菜过多的情况。运动餐盒每转一周停4次,从初始状态转动90°,停一次,以此反复做周期运动,直至用餐者饮食护理结束。
底座主要作用是固定餐盒支架,保证机器人重心的稳定。通过固定餐盒支架更加稳固餐盒的悬挂,可以在旋转餐盒时,餐盘自由被选择,同时不会出现摇晃等情况的发生。
1.3 伸缩旋转部件设计
伸缩旋转部件包含2个电机。上面的电机转动,使与电机连接的丝杆进行转动,丝杆上面的螺纹带动螺母向前运动,从而使勺子向前运动。在完成饮食护理动作时,勺子向后移动,回到初始位置。悬臂部件中下方的电机主要用来控制勺子旋转,被上面电机带动连杆向前运动的同时,控制勺子先逆时针旋转90°,待到勺子在自己需要选取的餐盘上方停下来,然后电机控制,带动勺子向顺时针方向90°,选取自己所要的食物,勺子在盛满自己想要的食物后,升降装置带动勺子向上运动,与悬臂相互配合,悬臂的电机使勺子向前运动,勺子到达患者嘴边,完成整个饮食护理动作。
1.4 运动餐勺设计
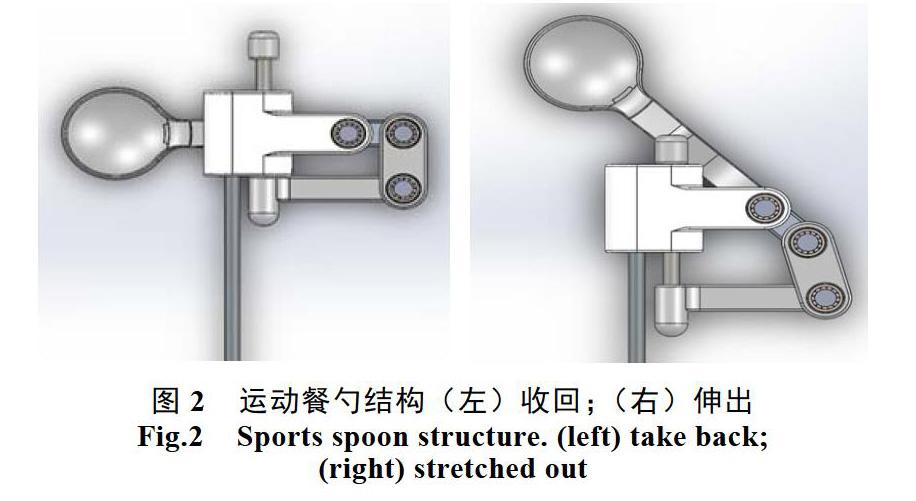
运动餐勺采用带有弧度的勺子,不仅可以节省一定的空间,在盛取食物时也更加稳定,使勺子与餐盘间保持一定的安全距离。带有弧度的勺子与直柄的勺子相比更安全。弯曲的勺子具有弹性,更耐用。整个结构采用连杆机构,组成四连杆,带动前面的勺子转动。当伸缩杆收回时,弹簧被压缩,使得勺子回到初始位置。当伸缩杆伸出时,弹簧将勺子弹出,勺子转到45°的位置,如下图2所示。
2 控制系统总体设计
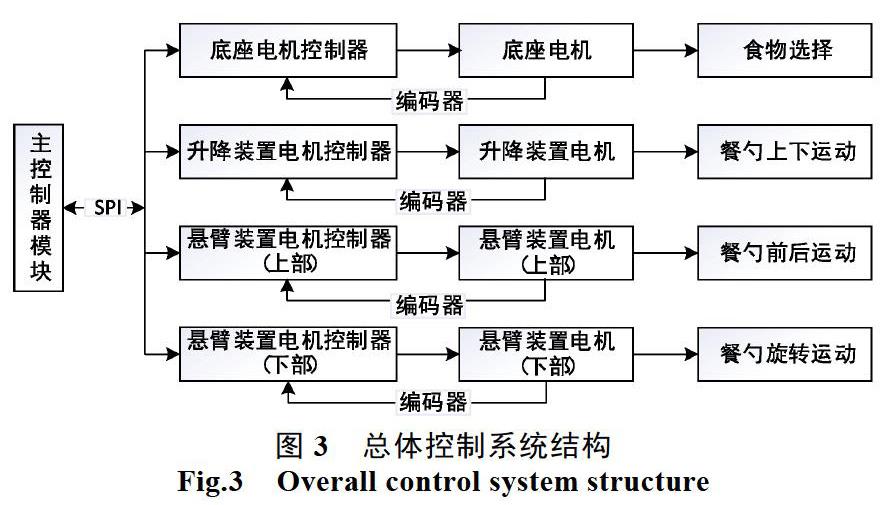
本文所设计的智能饮食护理机器人的电气控制系统主要负责控制机器人机械结构中的四个驱动电机:转盘升降部件电机(2个),伸缩旋转部件电机(2个)。因此本文控制系统的研究重点在于协调控制四个步进电机,使整个控制系统完成预定的饮食护理动作。动力控制系统由:主控制器,各个部件的子控制器和步进电机组成。它接收控制系统的控制命令并精确地控制四个自由度运动所对应的步进电机,按照预定好的最优的轨迹完成饮食护理动作。电气控制系统的总体设计方案,如图3所示。
3 运动学仿真分析
下图4为机器人取食和喂食过程,为了验证智能饮食护理机器人各个自由度的电机驱动运动效果,在SOLIDWORKS的运动仿真模块Motion中对建立的3D机构模型进行分析,Motion的运动分析解算器采用机械系统动力学自分析软件ADAMS的解算器。下图5为运动仿真结果。
4 系统实验
增量式光电编码器作为整个系统各关节的角速度和角度反馈,其测量的数据准确性直接关系到饮食护理机器人的正常运行。在本文的控制系统中设计了编码器去抖电路和软件去抖程序,通过硬件和软件的同时去抖尽量消除编码器的数据采集误差。以此来保证饮食护理机器人的正常运行。在本节中将设计实验来验證从编码器采集到的数据在经过硬件和软件去抖之后与未经过去抖采集的数据进行对比分析,来验证本文中设计的硬件去抖电路和软件去抖的有效性。
本文采用的编码器是500线的三相(A相、B相、Z相)增量式光电编码器,当CPU捕获到一个Z相脉冲时,则编码器旋转一圈。以捕获到一个Z相脉冲为标准来判断编码器转过360°。通过定时器Timer4的计数器TIM4->CNT来捕获A相、B相的脉冲数,以此来计算得到测量到的编码器转过的角度,用测量到的编码器转过的角度与标准角度进行对比判断去抖效果。分别在无干扰直接测量和安装在关节处测量两种情况下进行实验,实验时控制单一条件变量:条件一(无去抖)、条件二(仅硬件电路去抖)、条件三(仅软件程序去抖)、条件四(同时硬件电路和软件程序去抖)。
图6是无干扰状况和安装在关节处测量而计算得到误差率折线图,从图中很明显的可以看出随着编码器测量的旋转圈数增加,误差率越来越小且趋于稳定,这是因为测量的旋转圈数基数越小时,所产生的随机误差越大,所以当测量的旋转圈数一直增加时,误差率会趋于稳定。在编码器测量的旋转圈数相同时,总
是存在:条件一(无去抖)误差率>条件二(仅硬件电路去抖)和条件三(仅软件程序去抖)>条件四(同时硬件电路和软件程序去抖)误差率。这说明不管是条件二(仅硬件电路去抖)或者条件三(仅软件程序去抖)条件下,都能够明显的降低测量的误差率,具有显著的去抖效果,特别是在条件四(同时硬件电路和软件程序去抖)条件下,编码器测量的旋转圈数相同时的误差率最小,去抖效果最好。
5 结论
本文设计了一款智能饮食护理机器人。相对于国内外已有的关于饮食护理机器人的研究,主要创新点在于:采用步进电机+丝杠作为驱动组件,极大地提高了助餐过程的稳定性,餐盒上设置有食物刮片,可有效避免食物洒落和浪费;采用具有弹性、带有弧度的餐勺,盛取食物时更加稳定;且喂食时餐勺倾斜角为45°,符合人因工程学设计,更方便患者进食;采用智能结构,包含4个可单独拆卸的餐盘,方便使用者选择自己喜欢的食物;整体结构简单,体积小,重量轻,便于操作。
本文最后试制了实验样机,完成了机械结构与运动轨迹验证,实验样机可实现对用户的饮食护理,基本满足设计要求,实际运动轨迹与设计的两条运动轨迹基本运动趋势相同,证明设计的进食、抬臂收展动作轨迹是合理的。
参考文献
[1]国家统计局统计公告. 中华人民共和国 2018 年国民经济和社会发展统计公报, 2019.
[2]龙丹, 褚喜之. 浅析中国人口老龄化问题[J]. 经济研究导刊, 2013, 22: 199.
[3]张晓玉. 智能辅具及其应用[M]. 北京: 中国社会出版社, 2012: 1-10.
[4]王珏. 康复工程技术[M]. 西安: 西安交通大学出版社, 2008: 1-30.
[5]喻洪流, 石萍. 康复器械技术及路线图规划[M]. 南京: 东南大学出版社, 2014: 1-8, 11-13, 30-33.
[6]张祥, 喻洪流, 石萍, 等. 国内外饮食护理机器人的发展状况研究[J]. 中国康复医学杂志, 2015, 30(6): 627-630.
[7]Mike Topping. The development of Handy l, a robotic aid to independence for the severely disabled. Mechatronic Aids for the Disabled, IEE Colloquium on 17 May 1995(2): 1-6.
[8]Song W K, Kim J. Novel assistive robot for self- feeding[M]. Korea: INTECH Open Access Publisher, 2012: 1-628.
[9]Zhang X, Wang X, Wang B, et al. Real-time control strategy for EMG-drive meal assistance robot — my spoon[C]// International Conference on Control, Automation and Systems. IEEE Xplore, 2008: 800-803.
[10]Soyama R, Ishii S, Fukase A. 8 Selectable Operating Interfaces of the Meal-Assistance Device “My Spoon” [M]// Advances in Rehabilitation Robotics. Springer Berlin Heidelberg, 2004: 155-163.
[11]Dang Q V, Nielsen I, Steger-Jensen K, et al. Scheduling a single mobile robot for part-feeding tasks of production lines[J]. Journal of Intelligent Manufacturing, 2014, 25(6): 1271-1287.
[12]Nielsen I, Do N A D, Nielsen P. Scheduling Part-Feeding Tasks for a Single Robot with Feeding Quantity Consideration[M]// Distributed Computing and Artificial Intelligence, 12th International Conference. 2015: 349-356.
[13]杜志江, 孫传杰, 陈艳宁. 康复机器人研究现状[J]. 中国康复医学杂志, 2003, 18(5): 293-294.
[14]朱俊杰, 田野, 罗江红. 可控式用餐机[P]. 中国: CN200998019, 20080102.
[15]李彦涛. 助餐机器人样机研制及控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2012: 3-18.
[16]张立勋, 李彦涛, 何峰. 助餐机器人[P]. 中国: CN1919544, 2008-10-15.
