动力定位系统在海洋综合科考船定点作业中的应用
2020-12-08张彬彬俞启军吴永亭华清峰李治远石旭亮
张彬彬 俞启军 吴永亭 华清峰 李治远 石旭亮
摘 要:动力定位系统具有自动定位模式、自动艏向模式、自动航迹模式、目标跟踪模式、Joystick联合操纵模式等功能,可有效降低外部风、浪等环境因素对科考船调查作业的影响,提高调查作业的工作效率、原位精度,保障调查作业安全,对科考船调查作业具有极其重要的支撑作用。本文在介绍动力定位系统的系统组成和工作原理的基础上,针对“向阳红01”号新一代综合科考船动力定位的定点空位功能,结合船载调查设备,以海洋定点温盐观测(CTD)为例,详细分析动力定位系统在科考船定点作业中的应用,证明该系统能够有力保障定点作业的安全性,有力提高作业精度和效率,为科考船调查作业提供指导。
关键词:科考船;动力定位系统;定点作业;作业效率;原位精度
中图分类号:U644.1 文献标识码:A 文章编号:1006—7973(2020)10-0078-03
随着地球人口的急剧增加和世界经济的高速发展,导致的资源短缺问题和全球环境变化问题日益严重,海洋作为全球各类资源的储量库和环境污染的容纳器,海洋已成为各国海洋权益和经济发展的重要战略要地[1,2]。人类对海洋开发和探索的范围不断增加,我国海洋科学考察区域也步入深远海,科学家对新一代海洋综合科学考察平台表现出了迫切需求。海洋综合科考船是用于海洋科学调查、应用技术研究以及测量或勘探等船舶的统称,是人类探索海洋、认识海洋的重要工具,尤其是对中远海海域的科学考察发挥着不可替代的作用,我国自20世纪50年代开始建造海洋科考船,先后经历了改造、自主设计阶段[3-4]。经过半个多世纪的积淀与发展,随着“海洋强国战略”的实施,中国科考船进入高速发展阶段,尤其近几年国内建造了一大批新一代综合科考船,均配备先进的船舶动力系统和大量的海洋科考装备。如何充分利用船舶先进的动力系统和科考设备,进一步提高调查效率和精度、保证调查安全,需要一线船舶操控和作业人员利用专业知识交叉融合,共同深入探讨。
本文通过对科考船动力定位系统的介绍,结合“向阳红01”号科考船动力定位系统,分析其在科考作业中的应用优势,具体实例分析其在定点作业中的应用,为相关从业人员提供参考。
1 动力定位系统组成与工作原理
动力定位系统(Dynamic Positioning System)简称动力定位(DP),是一种闭环控制系统,它无须借助锚泊系统的作用,利用自身装备的各类传感器不断检测出船舶实际位置与目标位置的偏差、运动状态、外界风力、波浪、海流等扰动力的大小与方向,计算出使船舶恢复到预设目标所需推力的大小,通过控制系统驱动船舶推进器来抵消作用于船上的外力,使船舶保持在某确定位置或沿一定预定航迹航行,从而使船舶具备定点控位、水下目标跟踪与自动循迹航行能力,是深水钻井平台、深水辅助工程船、海洋科学考察船等均必须配的控制系统[5-8]。
船舶动力定位系统一般由测量系统、控制系统和推进系统三部分组成。测量系统提供了坐标反馈及环境传感器功能,包括提供船舶实时位置的定位系统、艏向数据的罗经系统、船舶姿态数据的运动传感器、提供外界环境数据的风速计、海流计等;控制系统通过一定的算法提供闭环调节功能,主要有数据处理单元、数据接口单元、数据解算单元和人员控制单元等;推进系统是执行机构,接受控制系统发出的指令,产生足够的推力和力矩以抵抗船舶受到的各种外力,实现动力定位,主要由多套发电机、尾部推進器、侧推进器组成[9-10]。
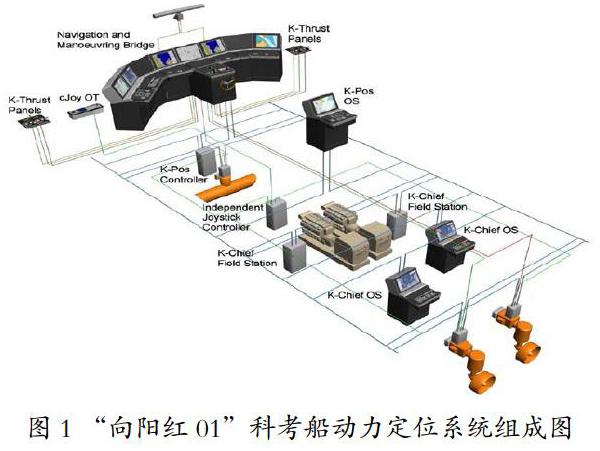
我国新一代综合科考船“向阳红01”安装的动力定位系统是DP1系统,其具备动力定位系统所有的基本功能。图1是“向阳红01”船动力定位系统组成图,为Kongsberg提供的K-Pos DP-11动力定位系统,其测量系统包括两套DGPS、MRU5、风速风向仪;其控制系统包括1套K-Pos DP-1控制器单元,3套K-Pos DP操作单元分别位于驾驶台、八角楼和ROV控制室,1套cJoy操作终端,两套K-Thrust便携控制面板;推进系统包括2台主发电机,吊舱推进器和侧推各1套。
K-Pos DP-11具有自动定位模式、自动艏向模式、自动航迹模式、目标跟踪模式、Joystick联合操纵模式等,功能丰富,满足科考船所有的调查作业需求[11]。使用自动定位模式时,在五级海况和1.5节流的条件下,控位精度误差不大于3米,在科考船定点作业中具有极其重要的作用。
2 动力定位系统在定点作业中的应用
在传统的科考船定点作业中,一般要求驾驶员根据水深、风流速度和方向等环境因素将船舶作业面迎风停泊在作业点附近,然后完车,使船舶在漂航的状态下作业,当船舶横向迎风时,船舶晃动加剧,降低作业人员和设备的安全。根据一般调查作业经验,科考船进行3000米水下设备定点作业时,绞车运行速度为40-60m/min,设备收放大概需要2-3个小时,受风、浪、流对船舶位置的影响,船舶一般漂出2-5海里,导致绞车缆倾斜收放,单次放缆长度在4000米以上。这种作业方式有以下缺点,首先,会增加绞车收放缆的长度,延长作业时间、降低作业效率,浪费船时;其次,会影响原位观测数据准度,如水体调查观测值并非垂直剖面,或地质采样作业时采样点与船位坐标偏差较大;最后,船舶漂移会降低着地取样的成功率。若船舶开启动力定位定点作业,动力定位系统则会抵抗外部风流等因素的影响,保持在设计作业点作业,既保障了船舶原位观测数据准度,又能够提高作业效率。因此,动力定位系统对重力柱取样、箱式取样、温盐深(CTD)观测、岩芯取样、电视抓斗、热流探针、声学原位测量等定点作业具有极其重要的意义。以下以“向阳红01”船定点作业为例,综合应用船上深水单波束测深系统,详细展示动力定位系统在科考船定点作业中的作用。
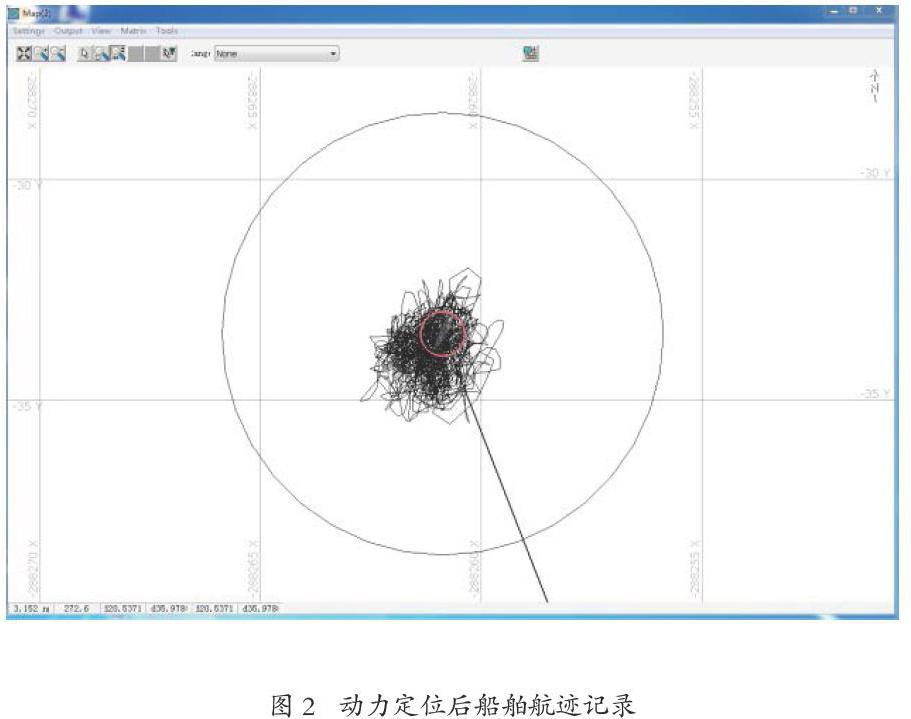
在某海域,“向阳红01”船在CTD作业前开启动力定位系统,使用导航定位软件Hypack记录科考船航迹,如图2所示,图中红色圆圈为船舶位置,直线代表航向,曲线代表航迹,外部圆圈的半径为5m,可以看出DP系统定位精度在2米左右。实践表明,“向阳红01”船在开启动力定位系统后,具有极高的控位精度,有助于提高定点调查作业的原位测量精度。此外,当遇到较差海况时,启用DP把船保持在顶风顶流方向,船舶的横摇将大幅缩小,有效降低作业风险。
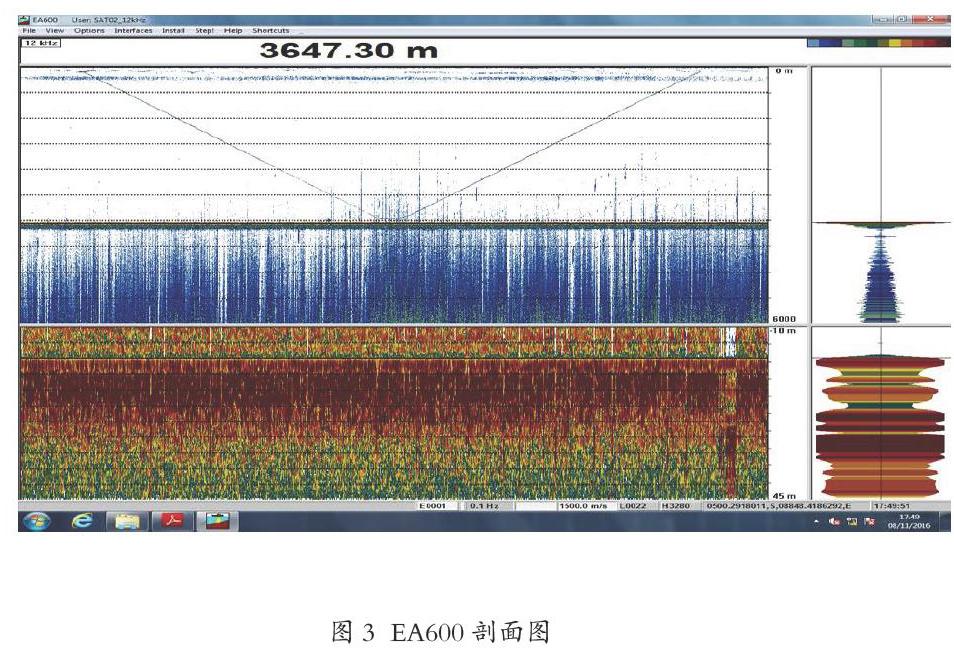
为记录水下设备在作业过程中状态,开启深水单波束测深系统(EA600),观测CTD作业过程。当设备下放到一定深度,设备位于单波束的波束开角范围内形成反射单元,部分下传声波能量遇到设备后形成除海底反射之外的反射能量,反射回换能器,而被单波束系统记录下来。
图3为作业时记录的单波束剖面图,由于开启动力定位,船舶实现精准定位,单波束探测海底区域为同一个反射面,所以在数据记录过程中水深为恒定值。设备的下放和回收过程均被单波束系统记录下来,如图3中虚线所示,剖面图可以反映设备的深度、海底深度,进一步可计算出设备的离底高度,而虚线的斜率则表示设备收放时绞车收放缆的速度。根据单波束EA600就可计算水下设备距底高度,为绞车放缆长度提供指导,避免設备作业安全问题。
为验证动力定位系统在作业效率方面的提高,在作业过程中记录CTD测得的深度、单波束EA600测得的设备深度以及CTD绞车放缆长度,对比三者之间的差值,如表1所示。将表1纪录三种数据进行绘图,横坐标为纪录序号,纵坐标为设备深度,进行对比,如图4所示。
CTD挂载的压力计是根据水压计算水深,具有极高的测深精度。根据表1数据对比CTD绞车放出缆长和压力计所测得的深度,两者最大差值在100米左右,表明在科考船使用动力定位作业时,设备基本垂直收放,避免因船舶随风流漂移而导致的设备倾斜收放,减少定点作业时绞车收、放缆长度,从而节约作业占用船时,提高作业效率。
另一方面,根据表1纪录数据,作业深度在3200米内时,对比压力计测得设备深度和单波束EA600测得水深,两者之间误差最大为40米,精度控制在4%以内,可有效指导设备与绞车的收放操作,对比图4所绘制的压力计测量深度曲线和EA600所测得深度曲线,两者可以很好地拟合,表明可以利用单波束能够实现设备水下定深。当设备距底较近时,在图4中仍可观测到设备的反射信号,提醒设备与绞车操作人员提高注意力,调整绞车收放缆速度,保障作业安全。
3 结论
根据动力定位系统工作原理,综合分析船舶动力定位系统作用和水下设备作业流程,通过实例分析得到以下结论:
(1)科考船定点作业时应用动力定位系统,可有效降低外界因素对船舶位置的影响,实现精准控位,可以减少绞车收放缆长度,从而节约作业占用船时提高作业效率,并且能够提高科考船深水定点作业原位观测数据准确度;
(2)海洋科考,装备先行,新一代综合科考船调查设备种类越来越丰富、技术指标越来越先进,然而现场工程师技术水平是作业安全、作业效率、测量精度的决定性因素,现场工程师应向全面型专业人才发展,综合利用船上调查设备,充分发挥设备能力,交叉印证,保障调查任务顺利实施。
参考文献:
[1]赵志高,杨建民,王磊,等. 动力定位系统发展状况及研究方法[J]. 海洋工程,2002,20(1): 91-97.
[2]余培文,陈辉,刘芙蓉. 船舶动力定位系统控制技术的发展与展望[J]. 中国水运,2009(2): 44-45.
[3]苏振东,余军浩,王凯,等,中美海洋科考船对比分析[J]. 舰船科学技术, 2016,38(1):154-157.
[4]张丽瑛,张兆德. 海洋科学考察船的现状与发展趋势[J]. 船海工程,2010,39(4):60-63.
[5]陆会胜. 船舶动力定位系统的使用[J]. 航海技术, 2006, 5:31-33.
[6]郑荣才,宋健力,黎琼,等. 船舶动力定位系统 [J]. 中国惯性技术学报, 2013, 21(4): 495-499.
[7]李军,方泉根,龚少军. 海工船动力定位能力分析系统研究与应用[J]. 中国航海,2014,37(1):120-125.
[8]何进辉,张海彬,朱仁传,等. 某深海钻井船DP3动力定位能力分析[J]. 船舶, 2018(5): 11-17.
[9]吴德峰,杨国豪. 船舶动力定位关键技术研究综述[J]. 舰船科学技术, 2014, 36(7): 1-6.
[10]何水原,罗伟东,于彦江,等. 动力定位系统再大洋富钴结壳中的应用[J]. 海洋地质前沿, 2015, 31(10): 57-64.
[11]李文明,于洋,俞启军. 船舶DP系统在科考船中的应用[J]. 中国水运, 2020(3):75-77.
基金项目:中国大洋矿产资源研究开发协会项目(DY135-S2-2-04)
