基于到达时间和到达方向联合定位的机动有源诱偏方法
2020-12-08汤建龙郭立博董阳阳
汤建龙, 郭立博, 董阳阳
(西安电子科技大学 电子工程学院, 陕西 西安 710071)
0 引言
反辐射导弹(ARM)的出现,对于现代战场中雷达的安全带来了极大的威胁。因此,如何对抗ARM攻击已成为雷达保护的研究热点。目前,有源诱饵是雷达方对抗ARM攻击的有效措施之一[1-12]。文献[1,3-4]从诱饵数量和布站方式分别研究了诱饵抗ARM技术。文献[5-6]分析了有源诱偏系统的诱偏性能。文献[7]从理论角度分析了诱饵的生存概率。上述研究对象均为固定式诱饵,近年来随着ARM跟踪精度的不断提高,固定式诱饵表现出诱偏效果差,自身易被打击的缺点。因此,有学者提出了机动式诱饵抗ARM攻击的方案[10-12]。文献[10-11]论证了机动式诱饵诱偏ARM的可行性。有源机动诱饵可靠诱偏ARM的关键在于利用ARM的位置信息选择恰当的诱饵关机时间。但是一方面,由于雷达关机后,诱偏系统无法获取ARM的运动信息,所以诱饵只能按照预先设计方案运动,这使得整个诱偏过程具有不可控性;另一方面,由于ARM丢失目标后惯性导航(简称惯导)误差的存在,导致ARM的落点具有随机性[13],同时也造成诱偏系统的诱偏效果不可预测,这两方面极大地影响了机动式诱饵的诱偏效果。
本文提出一种基于单站定位原理的单机动诱饵抗ARM的方法。诱偏系统利用诱饵回波信号获取ARM位置信息,并根据此信息预估ARM可能落点区域,以此确定最佳惯导距离(即诱饵关机时与ARM的距离),以提高诱偏过程的可控性,实现可靠诱偏。
1 诱偏系统设计
1.1 可定位机动有源诱偏原理
针对传统诱偏系统无法获取诱偏目标位置信息的设计缺陷,本文提出了一种可定位有源机动诱偏方法,如图1所示。该诱偏系统由一部雷达和一辆载有小型诱饵的机动车组成。由于雷达关机前可对诱饵进行目标方位引导,雷达发射机关机后诱偏系统可对目标进行实时定位,因此诱饵可采用定向天线,以提高诱偏效果并减小非目标物体散射信号对诱偏系统的干扰。

图1 诱偏过程示意图Fig.1 Schematic diagram of decoying process
其诱偏原理为:初始时,雷达和诱饵位于同一位置,雷达正常开机工作,诱饵保持关机;当雷达发现ARM时,雷达发射机关机,有源诱饵开机并向ARM方向辐射与雷达相同的信号,同时以一定速度向预设诱偏方向直线运动,ARM将跟踪诱饵运动(由于诱饵与ARM相距较远,因此诱饵天线只需调整较小的角度即可保证诱偏过程中ARM始终处于诱饵天线波束范围内),于此同时,雷达接收机通过接收ARM散射的诱饵回波信号对ARM进行定位,并将ARM的位置通过数据链路实时地传递给诱饵,诱饵根据ARM的位置预估其可能落点区域,进而确定最佳惯导距离;当ARM进入最佳惯导距离时,诱饵关机,并以其最大速度向相反方向逃离ARM可能落点区域;ARM丢失跟踪目标后,其惯导系统将按照记忆的目标位置继续向目标消失的方向飞行,直至重新发现目标或者达到预设高度引爆。
按照上述诱偏原理,诱偏系统设计流程如图2所示,其诱偏过程可分为拖引、逃离两个阶段。在拖引阶段,雷达发射机关机,诱饵开机工作,并且保持一定的速度向诱偏方向运动,诱偏ARM的跟踪方向,当诱饵到达拖引点(即预设位置)时,停止运动等待ARM进入最佳惯导距离;在逃离阶段,诱饵关机,并以最大速度向相反方向运动,逃离ARM的可能落点区域。

图2 诱偏系统设计流程图Fig.2 Flow chart of decoying system design
1.2 诱饵运动方向设计
诱偏方向和逃离方向分别为拖引阶段和逃离阶段诱饵的运动方向。考虑到当雷达和诱饵均关机后,ARM在发射面内落地点的不确定性较大,所以诱饵不应沿顺着或逆着ARM的飞行方向运动[10~12]。假设ARM的来袭方位角为α,俯仰角为β,则诱饵的运动方向可以在扇区(45°≤φ≤135°)内沿某一方向φ移动(见图3),仿真中以φ取45°、90°、135°这3种情况进行分析。诱饵关机后可继续向前运动逃离ARM的可能落点区域,也可向相反方向运动,考虑到诱饵关机后向相反方向运动可以缩短诱饵运动轨道的设计长度,因此本文以诱偏方向的反方向作为诱饵逃离方向。
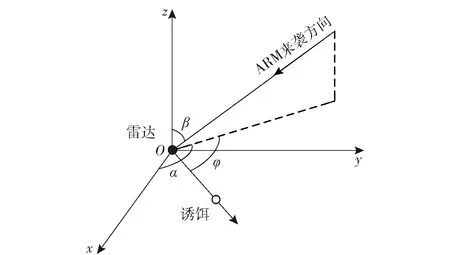
图3 诱饵运动方向示意图Fig.3 Schematic diagram of decoy movement direction
1.3 诱偏系统定位原理
雷达发射机关机后,诱饵开机并向诱偏方向直线运动,同时向ARM方向辐射与雷达相同的信号。但雷达接收机仍保持开机工作,接收ARM散射的诱饵回波信号并测量其到达方向(DOA)和到达时间(TOA)。诱偏系统通过雷达测向系统得到ARM的方位角α和俯仰角β,再利用诱饵回波信号的时延td确定ARM与诱饵、雷达之间的距离和,进而解得ARM的空间位置坐标[14-18]。
诱偏系统定位原理如图4所示,雷达位于坐标系的原点,ARM的坐标为(x,y,z),诱饵的坐标为(xD,yD,zD),雷达测得诱饵回波信号时延td为

(1)
式中:c为电磁波传播速度。图4中ρ为ARM与雷达之间的距离,vd为诱饵的平均运动速度。
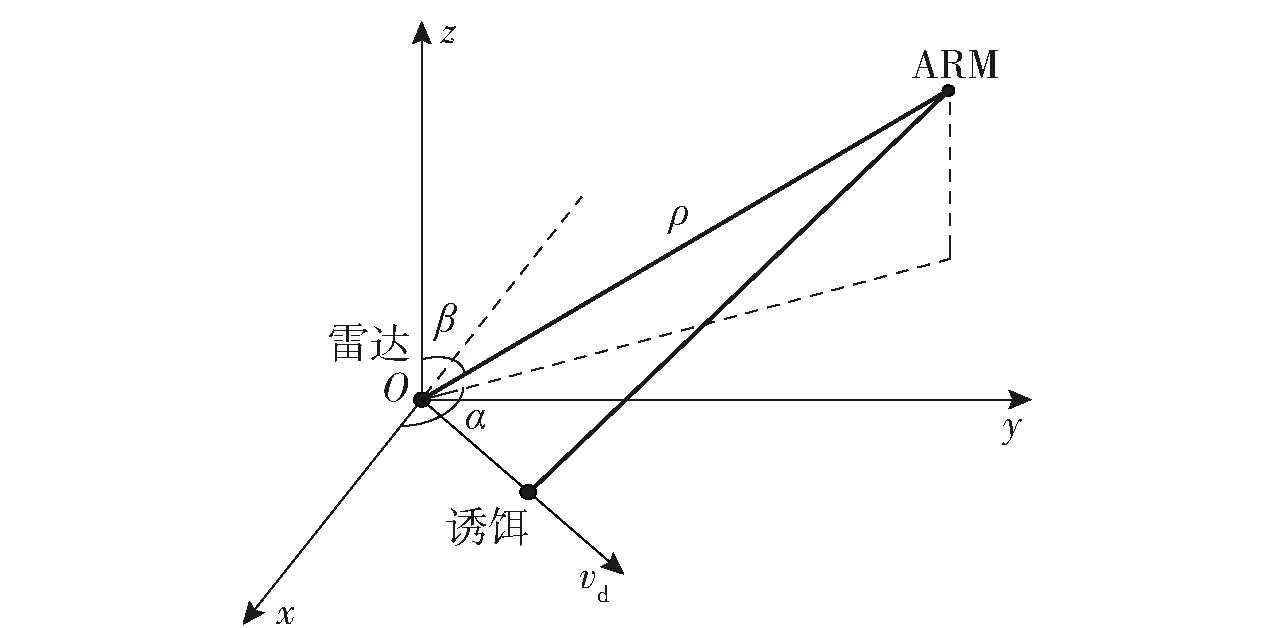
图4 诱偏系统定位原理图Fig.4 Schematic diagram of decoying system localization
化简(1)式,得
(2)
ARM直角坐标与球坐标之间的关系为

(3)
(3)式代入(2)式,得
(4)
将ρ代入(3)式即可确定ARM的空间位置坐标。
由(3)式和(4)式可知,定位系统的系统误差主要由方位角α、俯仰角β和时延td的测量误差所致,因此,对(3)式求全微分,可得诱偏系统的定位误差:
(5)
式中:ρα、ρβ、ρtd分别为ρ对于α、β、td的偏导。
在实际诱偏过程中,可能存在非目标物体散射信号对定位系统的干扰,类似于信号的多径传播问题,针对该问题本文考虑采用以下3个方法解决:1)诱饵采用定向天线,进行有向辐射信号,减小近地物体的干扰;2)雷达从多普勒维滤除非目标物体的散射信号;3)可通过类似航迹关联的方法剔除异常定位值。为了简化分析,本文假设通过这3个方法可有效消除非目标物体散射信号对定位系统的干扰,因此仅考虑了系统误差对定位精度的影响。
1.4 危险区域
为了简化分析,本文将ARM飞行过程中所有的跟踪误差综合考虑为ARM丢失目标时的惯导误差γ,并认为目标未关机时ARM可以稳定跟踪目标。当雷达和诱饵均关机后诱偏系统不能确保ARM最终跟踪理想拖引点(即诱饵关机时的位置),ARM将随机跟踪拖引点附近区域的某个位置,将ARM的可能落点区域称为危险区域,如图5所示。
分别建立诱偏坐标系和航向坐标系,诱偏坐标系Oxyz以雷达的位置为原点,航向坐标系O″x″y″z″以ARM的位置为原点,如图6所示。诱饵关机时,ARM坐标为(xA,yA,zA),诱饵坐标为(xD,yD,zD),即拖引点坐标。在航向坐标系下,雷达坐标为(x″R,y″R,z″R),诱饵关机时的坐标为(x″D,y″D,z″D)。图6中,P是危险区域内与雷达距离最近的点,P点与拖引点之间的距离为d,经过危险区域边界上任意一点i与ARM点的空间直线为Li.
航向坐标系与诱偏坐标系之间的关系为
(6)

空间直线Li在航向—球坐标系下的单位方向向量为(φ″Li,θ″Li,1),则在诱偏—直角坐标系下的单位方向向量(xLi,yLi,zLi)为
(7)
式中:φ″Li∈[0°,360°);θ″Li=γ.
因此,空间直线Li与Oxy平面的交点坐标(xi,yi)为
(8)
由(7)式和(8)式即可确定危险区域的边界。
从图6可以看出,为了充分保障雷达和诱饵的安全,必须使雷达和诱饵最终远离上述的危险区域,除此之外,还应考虑ARM的杀伤半径R. 因此,可以通过预估危险半径,调整诱饵关机时间,以减小ARM制导误差对诱偏效果的影响。

将d与ARM杀伤半径R之和称为危险半径D+,通过(9)式即可确定危险半径D+:
(9)
式中:ARM的杀伤半径R约为30 m.
由(9)式可知,危险半径的大小由诱饵关机时ARM的位置和诱饵的位置所决定,将诱饵关机时ARM与诱饵之间的距离称为惯导距离LINS.
2 仿真与分析
2.1 危险半径大小分析

图7 在不同诱偏方向下平均危险半径与惯导距离 之间的关系Fig.7 Relationship between mean hazard radius and inertial navigation distance in different decoying directions
惯导误差γ一定时,危险半径的大小主要由惯导距离决定。考虑惯导误差γ为1°,图7给出了在不同诱偏方向下平均危险半径与惯导距离之间的关系。
从图7中可以看出,在一定的惯导误差下,ARM的危险半径会随着惯导距离的增大而增大。在惯导距离相同情况下,诱偏方向为90°时,ARM的危险半径较小;诱偏方向为45°和135°时,ARM的危险半径近似相同。惯导距离较小时危险半径也相对较小,但由于此时诱饵与ARM之间的距离太近,所以诱饵没有充足的时间逃离危险区域;惯导距离较大时,雷达将被ARM的危险区域覆盖,不能确保雷达的安全。因此,必须通过控制诱饵的关机时间,选择最佳的惯导距离,使雷达和诱饵的最终位置远离危险区域,以充分保障诱偏系统的安全。
2.2 最佳惯导距离
为了确保诱饵和雷达的安全,应保证满足:
LINS>D+vA/vd∧Ld>D+,
(10)
式中:vA为ARM平均运动速度;Ld为拖引距离,是诱饵从开机到关机这段时间内直线运动距离。考虑ARM的制导均方误差为1°时,惯导距离的可选取范围如表1所示。
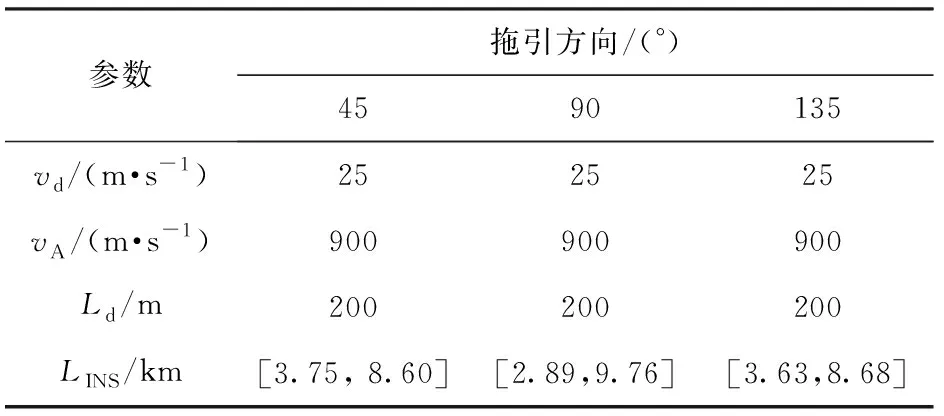
表1 惯导距离可选取范围Tab.1 Effective range of inertial navigation distance
设雷达与危险区域之间的距离为RD;诱偏结束时诱饵与危险区域之间的距离为DD;将RD与DD之间的最小值称为安全距离,安全距离与惯导距离之间的关系如图8所示。

图8 在不同诱偏方向下安全距离与惯导距离之间的关系Fig.8 Relationship between safe distance and inertial navigation distance in different decoying directions
从图8可以看出,惯导距离为7.2 km时,诱偏系统与危险区域之间的距离最大,故最佳惯导距离为7.2 km. 取表1中的参数,诱饵运动到拖引点需要8 s,由此可知,诱偏系统所需的最小告警距离为14.4 km. 当告警距离大于14.4 km时(一般雷达告警系统均可满足此条件),诱偏系统可调整诱饵的运动状态使ARM进入最佳惯导距离,以达到最佳诱偏效果。
从上述分析可知,诱偏成功与否关键在于诱饵关机时间的确定,而关机时间的确定需要已知ARM与诱饵、雷达之间的距离,即需要对ARM实施精确的定位。由于ARM的飞行过程是一个动态变化的过程,如果仅通过诱偏方案的预设计确定诱饵关机时间和ARM的惯导距离,显然此诱偏过程是不可控的,诱偏效果存在随机性。因此,有必要采取一定的措施在整个诱偏过程中对ARM进行实时定位,确定诱饵的关机时间,选择最佳惯导距离,以提高诱偏系统的可控性,充分保障雷达和诱饵的安全。
2.3 诱偏系统定位性能分析
按照本设计中提出的定位方法,由(3)式和(4)式易知诱偏系统定位误差的影响因素主要为角度测量误差和TOA测量误差。误差主要来自系统误差和随机误差,不同的测量方法其系统误差不同,为了简化分析,本文不考虑系统误差,并且认为方位角和俯仰角测量均方根误差相同,不同角度测量误差和TOA测量误差与定位误差之间的关系如图9所示,图中定位误差单位为m.
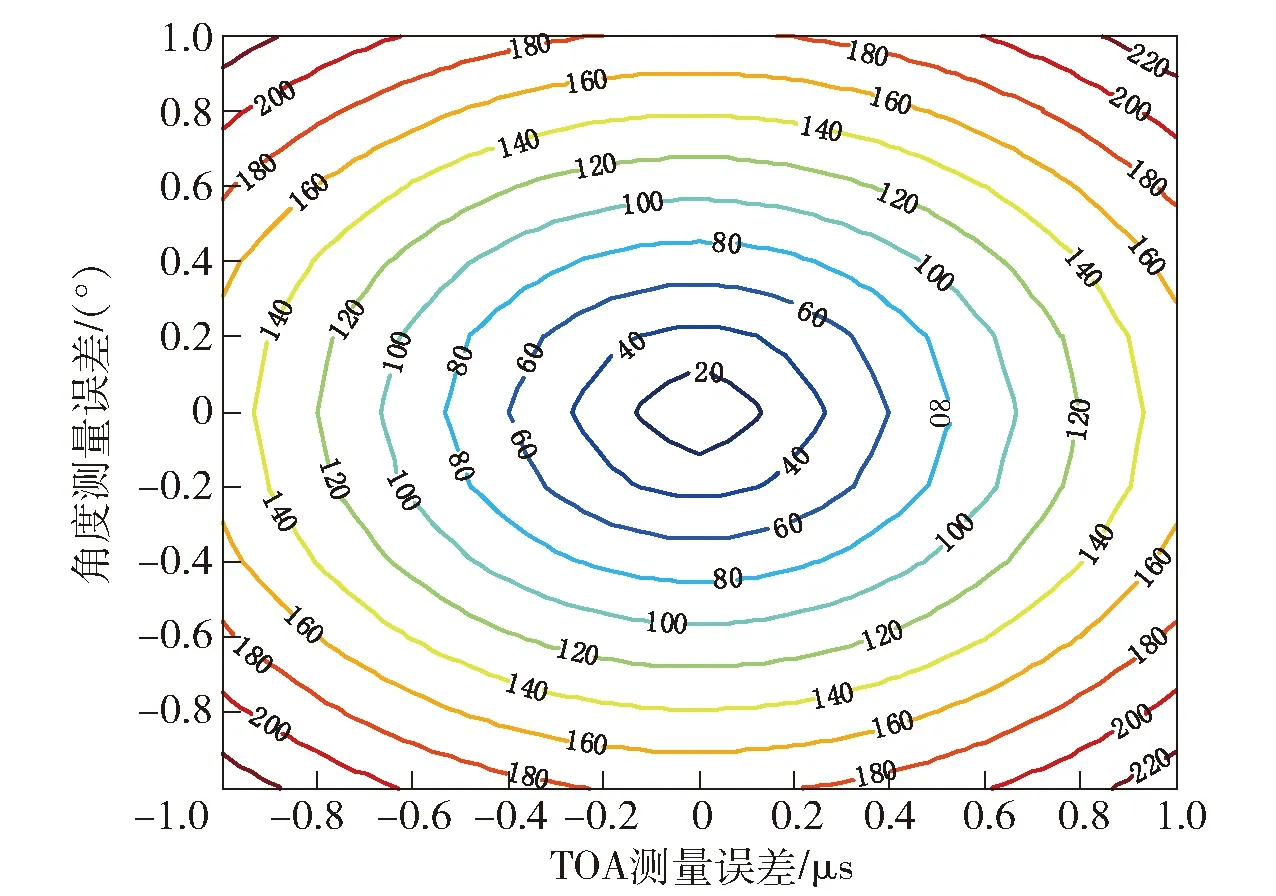
图9 角度测量误差和TOA测量误差与定位误差 之间的关系Fig.9 Relationship between angle measurement error, TOA measurement error and location error
从图9可以看出,角度测量误差为1°且TOA测量误差为1 μs时,诱偏系统的定位误差约为225 m. 由于ARM的飞行速度很快,所以定位误差对于诱偏系统的影响较小,在一定的冗余范围之内。
下面采用蒙特卡洛法对于定位曲线进行仿真, ARM飞行过程中每次定位仿真1 000次。考虑诱偏系统角度测量均方根误差为1°,时延测量均方根误差为1 μs,则诱偏系统对于ARM的定位曲线如图10(a)所示,定位均方根误差如图10(b)所示。
图10 诱偏系统对ARM的定位结果Fig.10 Positioning results of decoying system for ARM
图10为诱饵开机期间诱偏系统对ARM的定位仿真结果:从10(a)图中可以看出,在一定测量误差范围内,诱偏系统对于ARM的定位曲线近似拟合于ARM的飞行轨迹;从10(b)图中可以看出,ARM与诱偏系统越近,定位误差越小。定位曲线与飞行轨迹拟合度越高,越有利于诱偏系统确定恰当的诱饵关机时间。若雷达测量误差增大,定位误差亦会随之增大,此时会导致诱饵偏离最佳关机时间,增大了ARM对诱偏系统的威胁。
2.4 诱偏效果
按照上述的诱偏方法,仿真验证诱偏系统的有效性。考虑ARM惯导误差方差为1°,诱偏系统角度测量误差方差为1°,TOA测量误差方差为1 μs,诱饵运动速度为25 m/s,ARM平均速度为900 m/s,ARM初始坐标为(0 km,9 km,15.6 km),拖引距离为200 m. 采用蒙特卡洛法对不同诱偏方向的诱偏过程仿真500次,ARM落点和诱饵运动终点分布如图11所示。
图11 ARM的落点和诱饵运动终点分布图Fig.11 Distribution diagram of ARM drop point and decoy movement terminus
从图11中可以看出,雷达和诱饵最终均远离ARM的可能落点区域,即使ARM存在一定的惯导误差,该诱偏系统也可充分保障雷达和诱饵的安全。诱偏系统通过对ARM进行实时定位,选择最佳惯导距离,以达到最大安全距离,并且仿真实验表明诱偏系统较小的定位误差对于诱饵最终移动距离的影响几乎可忽略不计。
综上所述,可定位诱偏系统不仅不需要考虑诱饵的开机时间,而且可以通过调整惯导距离,使得诱偏系统获得最大安全距离,故该诱偏系统在一定的先验信息和测量误差下可充分保障诱饵和雷达的安全,是一种较为理想的抗ARM攻击措施。
3 结论
本文针对雷达关机后,传统有源诱偏系统无法获取ARM位置的缺陷,提出了一种基于TOA和DOA联合定位的机动有源诱偏方法。该方法利用雷达接收机和诱饵辐射信号实时获取ARM的位置信息,并通过预估ARM的可能落点区域选择恰当的诱饵关机时间,可以达到高效可靠的诱偏效果,充分保障雷达和诱饵的安全性。仿真实验结果给出了最佳惯导距离并验证了所提方法的有效性,为雷达抗ARM系统设计提供了新思路,具有重要的工程实践意义。
