光学辅助机载惯导航向测量系统设计
2020-12-08崔旭涛王诚成
崔旭涛,王 宇,王诚成,梁 锋
(1.军事科学院,北京 100091;2.中国人民解放军32087部队,北京 100094; 3.海军航空大学岸防兵学院,山东 烟台 264001;4.中国人民解放军91395部队,北京 102488)
在当前作战飞机担负昼夜等级值班任务,亟须提高飞机快速出动效率背景下,机载惯导系统初始对准多采用静基座自主式对准完成,该方法初始精对准时间长,粗对准惯导系统姿态和航向误差大等问题比较突出,制约了航空兵部队飞机出动能力和效率,影响了战斗力的有效提升,因此,探索机载惯导系统初始对准技术和方法,提升机载惯导初始对准精度、缩短机载惯导初始对准时间,是当前部队面临的关键问题之一。本文结合作战飞机惯导初始对准快速性、准确性需求,提出了一种飞机机载惯导系统初始对准新方法,并设计了一套基于光学辅助标定的机载惯导航向测量系统,以有效解决机载惯导初始对准的问题。
1 问题提出
初始对准是机载捷联惯导系统的关键技术之一,对准精度和对准反应时间是两项重要指标[1-2]。由于惯导系统启动后,初始姿态未知,导致后续姿态无法解算,为此必须在惯导系统工作之前进行初始对准来确定系统初始姿态矩阵[3-6]。而航空兵飞机执行任务要求出动速度快、机动性强,对惯导系统初始对准的快速性、准确性提出了较高要求。机载捷联惯导初始对准的目的是消除由原理、器件误差及安装偏差导致的初始偏差,在较短时间内以一定精度确定初始捷联矩阵。
当前陆基飞机多采用静基座自主式初始对准方法,即飞机载体惯导系统使用陀螺仪和加速度计对重力矢量和地球速率矢量的量测信息通过解析方法解算出捷联矩阵完成粗对准,利用卡尔曼滤波器进行失准角的估计,修整姿态矩阵的偏差完成精对准[7]。这种自主式对准方法可明显提高对准精度,但存在方位失准角可观测性较差、收敛速度慢,导致精对准模式下,惯导可达到较高的对准精度,但需要对准时间长,在粗对准模式下,可缩短对准时间,但对准精度较低,影响飞机执行任务成功率。
本文针对飞机静止状态下,水平姿态对准速度快,方位对准速度慢等现实问题,基于机载惯导静基座对准方法,提出了一种基于光学辅助标定的载机惯导航向对准方法,设计了一套精密光学辅助航向角测量系统及基准源,形成了载机惯导辅助初始对准工作流程,通过该非自主式惯导初始对准体系结构方法,在惯导完成水平姿态自对准后,将辅助测量系统测得的高精度载机航向角传递给惯导系统,完成载机惯导系统的初始对准,可简化对准流程、缩短对准时间、提升对准精度,且该方法易于工程实现。
2 初始对准算法
2.1 基本思路
基于光学辅助标定航向角测量的基本思路是:通过高精度经纬仪对载体上特征点进行俯仰和方位测量,获得俯仰和方位信息,通过高精度激光测距,获得距离信息,然后,进行测量解算。测量系统的测量场景示意图如图1所示。

图1 测量系统的测量场景示意图
2.2 航向角测量算法
基于载机光学辅助标定航向测量系统,在系统俯仰、滚转轴与水平面平行后,使用系统上光学成像系统、激光测距系统捕捉载机上的2个标志点,进行两次激光测距,得到载机上2个标志点到该系统之间的距离L1、L2,与之对应的俯仰角为θ1、θ2,计算出L1、L2在水平面上的投影l1、l2,如图2所示。
l1=L1cosθ1
l2=L2cosθ2
(1)
两次激光测距过程中,测量系统转过的方位角记为ψ1。由ψ1、l1、l2构成一个三角形,该三角形中α角与ψ1、l1、l2之间关系为

图2 对准测量在水平面的几何关系示意图
(2)
由公式(2)求出α值。
测量系统转向基准柱方向,激光测距仪对两个基准柱进行测距。两个基准柱标志点到测量系统的距离为l3、l4,转过的方位角为ψ3,计算出β值。
(3)
测量系统测量飞机上的第一个标志点之后,转向最后一个基准柱时转过的方位角记为ψ2。飞机惯导输出的航向角为yaw,飞机机体上两个标志点连线在水平面上的投影与飞机轴线夹角为δ,两个基准柱连线与北向夹角为yaw0,根据几何关系可得
(4)
因此,可得
yaw0+δ=yaw+π-ψ2-α-β
yaw=yaw0+δ-π+ψ2+α+β
(5)
经推导,公式(5)描述了基准柱方位角与飞机航向之间确立的几何关系。δ虽未知,但对于每架飞机视为一个固定值,测量时无需求取其确定数值。
2.3 对准工作流程
载机光学辅助标定航向测量系统工作主要分为标定测试与测量对准两个阶段。
1)标定测试阶段
基准柱安装完成时,其连线与北向方位角yaw0为未知量;而对于每架飞机,其机体上标志点的连线在水平面上的投影与飞机轴线的夹角δ各不相同,且难以精确测量。因此,在测量系统使用之前,需进行标定实验,以获取yaw0+δ值。其标定测试流程如图3所示。在测量系统标定调试阶段,主要开展以下工作:飞机上选择测量点并做出标记点;采用激光跟踪仪或全站仪测量出被测点的相对位置,作为测量时校验用;飞机惯导输出航向信息;测量系统测量地面靶标,构建测量仪坐标系;用测量系统观瞄标记点;数据处理,建立标记点与飞机基准坐标系间的关系。

图3 系统标定测试流程
标定时,首先启动载机惯导系统,进行载机自主式精对准,得到精确航向角yaw。启动测量系统分别对载机上两个标志点进行测距,利用获得的距离和角度信息,计算得出α。测量完载机上的两个标志点后,测量系统继续转过ψ2方位角指向基准柱,分别对两个基准柱进行测距,并计算得出β;利用载机输出精确航向值yaw、方位角ψ2、α、β,即可计算得出yaw0+δ。基准柱固定不变,yaw0固定不变;对于不同飞机,由于其载机标志点位置、结构不相同,δ也不相同,因此,在测量系统使用之前,需对每架飞机都进行一次标定测试实验,记录与其对应的yaw0+δ。
2)测量对准阶段
在测量对准阶段,流程与标定测试过程相反,其测量对准流程如图4所示。飞机停在泊机位后,测量系统首先对两个基准柱进行测量,计算得出β,然后,测量仪转过ψ2,光学系统自动捕捉飞机上的两个标志点,进行两次测量计算得出α,调取标定时记录yaw0+δ的数据,即可计算得出载机的精确航向值。

图4 系统测试对准流程
3 光学辅助测量系统总体设计
3.1 系统构成
根据载机航向角测量算法需求,设计基于光学辅助标定惯导航向测量系统,其系统组成如图5所示。该系统主要包括光电平台和调平基座两部分。光电平台主要由主控计算机、图像跟踪器、伺服控制器、机械结构、可见光相机及激光测距机等单元构成,调平基座主要包括底板、调平地脚、调平旋钮和水平仪等。

图5 系统组成图
3.2 系统工作流程
光电平台在主控计算机的控制下工作,实现机载航向角测量等功能,主控计算机通过RS422通信接口接收控制指令和参数数据,引导光电平台工作,系统工作流程如图6所示。其工作流程如下:

图6 光电平台的工作流程图
1)光电平台通电自检,自检结束后光电平台接收上位机指令并控制光电平台伺服转动、可见光相机、激光测距机等单元工作;
2)确认光电平台工作状态正常,开始执行任务;
3)光电平台根据上位机发来指令信息控制光电平台方位、俯仰轴转动,实现光电平台手动模式,自动模式和引导模式等功能;
4)光电平台根据上位机发来的指令启动/停止激光测距,采集激光测距值发送给上位机;
5)上位机根据光电平台测距结果结合光电平台的角度信息解算出目标的位置信息并输出数据。
3.3 系统设计关键技术
1)硬件设备选型
系统硬件系统主要包括:光学成像子系统、激光测距子系统、伺服电机、编码器、水平尺等。为满足系统设计指标要求,其选型与设计的基本参数如下:
光学成像子系统应根据标记点目标大小20 mm×20 mm,视场角±1°进行选型,确保目标大小在光学相机上至少占20个像素。为了达到一定的测距精度,满足系统航向角测量精度要求,激光测距子系统选用1.0 mm激光测距精度。测量系统俯仰和方位旋转通过伺服电机和编码器进行控制,编码器选用的角分辨率为19 bit、静态误差<0.01°(0.17 mrad)。系统调平选用精度在30″以内的高精度水平仪,同时对安装基面平整度及加工公差提出要求,水平仪与安装基准之间的调整误差为σv1,调整固定后变为系统误差,从系统结构和尺寸等因素考虑,取最大误差值为20″,可以保证水平调平精度满足优于30″的指标要求。
2)软件设计关键技术
测量系统软件设计主要包括图像处理、目标识别跟踪及伺服控制等。其主要功能如下:
①图像处理软件
图像处理软件的设计主要包括以下功能模块:系统初始化,上电初始化DSP各寄存器、外部设备和全局变量等;图像数据采集,DSP通过EDMA方式将图像数据采集到片内RAM区;数据处理,包括目标检测和目标脱靶量计算两个算法模块;串口数据发送,通过RS422串口将目标脱靶量等计算结果发送给平台主控系统;串口数据接收,通过RS422串口接收主控系统发来的控制命令。图像处理软件流程如图7所示。

图7 图像处理软件流程图
②目标识别跟踪
目标识别跟踪模块设计采用多层算法结构:底层图像预处理技术(中值滤波、直方图统计),中层图像特征提取技术(图像灰度拉伸、SFIT特征提取),顶层目标模板匹配与目标提取(SFIT特征匹配、模糊阈值分割),最终实现多模融合的目标识别跟踪。目标识别跟踪软件流程如图8所示。
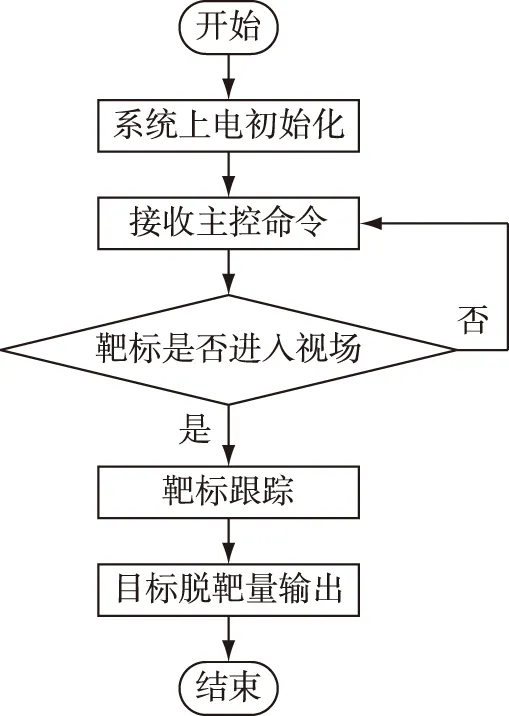
图8 目标识别跟踪软件流程图
4 实验验证
本文为对该测量方法进行验证,利用测量系统进行测量实验,验证其对准速度和精度。实验中利用标志靶模拟载机上的标志点,既验证了测量仪完成一次测量的时间,又验证了测量系统的测量误差,分析了测量系统精度能否满足对准需求。
该系统方位和俯仰两个轴均采用19位高精度光电编码器,角位置定位精度可达0.001°,光学图像测量误差为2个像素,激光测距仪精度为2 mm(3σ),伺服电机能够以10°/s的速度驱动测量仪进行回转和俯仰运动,自动识别标记点并进行测距。
完成安装标定后,测量仪即可进行测量操作,测量耗时如表1所示,测量仪上电启动并完成自检,耗时0.5 min; 测量仪回转至基准柱,对基准柱上的标志点进行测距计算,耗时1 min;再自动回转至机载惯导方向,对机体上的标志点进行测距计算,耗时1 min,最后,完成航向信息的计算和注入,耗时0.5 min。因此,利用测量仪完成对准,总计耗时3 min。

表1 测量仪测量耗时统计
测量仪进行5次测量实验,记录每次测量得出的航向值与标定时注入测量仪的航向值,即可得到测量仪的测量误差,如表2所示。

表2 测量仪测量误差统计
根据表1、2的实验结果可知,相对于机载惯导的自对准,本文提出的辅助测量方法可以在3 min的时间内快速完成航向测量,且测量仪测量误差优于粗对准的精度,可满足机载惯导快速对准的要求。
5 结束语
本文立足于飞机快速反应需求,提出了一种采用惯导系统水平姿态自对准、方位信息外部辅助测量的方式构建新对准体系,给出一种光学辅助标定航向测量系统的设计方案,该系统采用高精度激光测距仪和光电伺服机构实现距离、角度参数的测量,该系统经过实验室验证,可显著缩短对准时间,提高对准精度;且可自动运行,具有测量精度高、速度快的优点,相对于传统的光学定向测量系统,该装置无需昂贵复杂的高精度陀螺仪等设备,具有结构简单、成本低、简便易用的优点。
