嵌入遗传算法的顺轨干涉SAR海表流场反演新方法*
2020-12-07赵现斌
赵现斌,严 卫,王 蕊,陆 文
(国防科技大学 气象海洋学院, 湖南 长沙 410073)
海表流场作为海水重要的运动形式之一,描述了海水大规模相对稳定的流动,它可将海洋中的热能和物质,如水体及包含其中的营养盐和泥沙等,从一个海域输送到另一个海域,直接影响相关海域的天气和气候,并进一步引起海洋生态系统、海岸和海底地形的变化。另外,海上交通运输线路、海上搜救的规划、溢油和其他污染物扩散跟踪,常常利用海洋表层海流的运动规律进行计算和研究。因此在海洋应用中,掌握海洋流场的特征和变化规律,对于海洋灾害预警、海洋环境污染、海洋经济建设、海洋工程、海洋渔业和海上军事活动等具有极其重要的意义。
海表流场探测是海洋环境探测中仍然存在的一个难点问题。常规观测手段仅能定点观测特定区域,很难满足海表流场全球性、持续性观测需求[1]。遥感探测手段主要包括岸基高频雷达[2-4]和卫星高度计[5-6]等。其中,高频雷达通过海面回波的多普勒频谱偏移反演海表流场,目前已经商业化运营。但其主要用于沿岸200 km以内的区域流场观测,无法实现全球监测,且受到雷达入射角限制,在近海存在探测盲区。卫星高度计通过计算海表波高变化反演流场,主要用于大、中尺度的海表流场观测。然而,卫星高度计探测流场的分辨率较低,约为几十到几百千米量级,且无法应用于近海探测。
近些年,由于可以利用干涉相位与多普勒速度的正相关性反演海表流场信息,顺轨干涉合成孔径雷达(Synthetic Aperture Radar,SAR)逐渐受到更多关注[7-8]。由于干涉相位计算的多普勒速度包含了海表流场、海面风场、轨道速度和Bragg相速度的贡献。顺轨干涉SAR海表流场反演问题的核心是多普勒速度分量分离问题。针对这一问题,国外学者或利用先验海面风场和海浪信息计算轨道速度贡献,或采用实测流场数据定标[9],或利用L、C双频顺轨干涉SAR数据消除Bragg相速度[10],或基于风向与Bragg相速度的经验关系消除Bragg相速度[11]。然而,由于波流速度的相互叠加以及海面风场的影响,传统多普勒速度分离方法很难有效实施。
基于M4S微波成像仿真模型,Romeiser等提出了顺轨干涉SAR流场迭代反演算法,通过迭代计算使得仿真干涉相位(仿真流场输入M4S模型计算获取)和实测干涉相位相匹配,确定最优匹配的流场作为海表流场最优解[12-14]。于祥祯等详细给出了海表流场校正方案,并利用JPL AIRSAR顺轨干涉SAR数据开展了反演实验,验证了反演方法的有效性[15]。刘宏伟[16]、王文煜[17]分别基于TanDEM-X、TerraSAR-X和GF-3 SAR数据开展了反演算法研究。
海表流场迭代计算时,校正系数决定了海表流场收敛速度。合理设计校正系数确定方法,减少迭代次数,是提高反演效率、获取高精度反演结果的重要途径[18]。因此,本文提出采用遗传算法计算校正系数,改进海表流场反演方法,并通过星载SAR数据仿真实验对反演效果进行验证。
1 顺轨干涉SAR测流原理
顺轨干涉SAR探测的干涉相位与雷达视向的多普勒速度成正比[7-8]。因此,通过两个雷达天线(沿同一方向)对同一海洋目标场景进行成像。由于两个天线存在成像延时,两幅SAR复图像的对应像素存在一定相位差,这个相位差与成像时分辨单元内的平均径向速度有关[19]。
图1为顺轨干涉SAR对目标场景成像示意图。图中,把两个天线间的有效基线长度记为B,搭载平台的运动速度记为V。此时,两个天线对同一探测目标的成像延时可表示为Δt=B/V。假设海面某一目标散射元T(x0,y0)的径向速度分量为ur(x0,t),则在成像延时Δt内,散射元沿雷达视向方向运动的距离(远离雷达视向时ur为正值)为:
ΔR=urΔt
(1)
此时,顺轨干涉SAR获得的干涉相位可表示为:
(2)
式中,Ifore和Iaft分别为前、后两个天线探测的SAR复图像,λ表示雷达波长,arg(·)表示取相位处理。
从式(2)可知,海面径向速度与干涉相位的函数关系可表示[15]为:
(3)
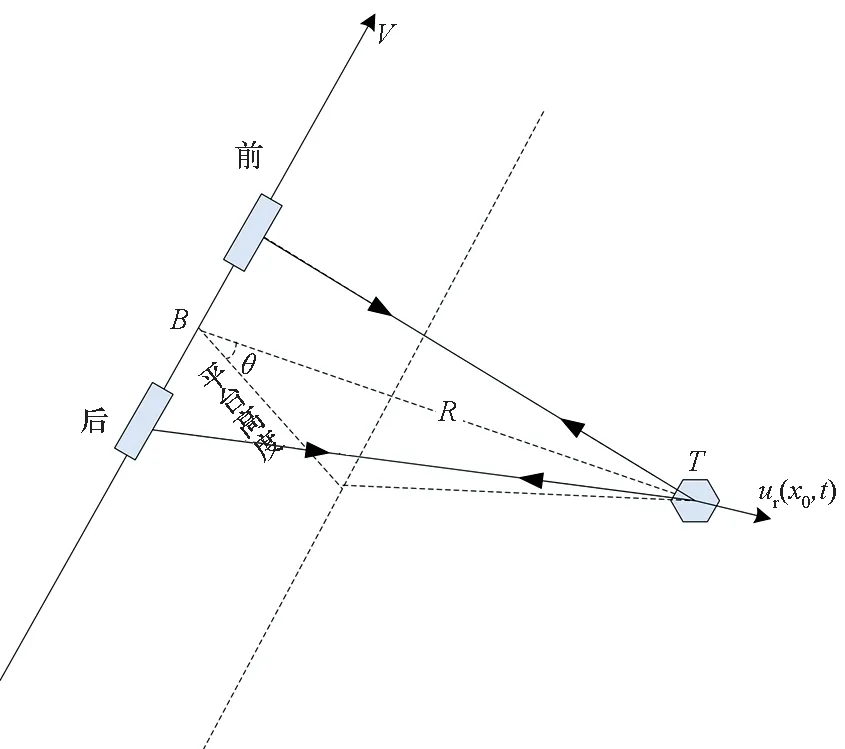
图1 顺轨干涉SAR对目标场景成像示意图Fig.1 Schematic diagram of the target scene with along-track interferometric SAR
从图1可知,顺轨干涉SAR仅能获得雷达视向的海表流速分量,而海表流场是一个二维矢量。实际探测中,可以采用加装不同视向天线组或者通过航向设计[20],获得不同方向的海表流速分量,再矢量合成二维海表流场。目前已有Ku波段双波束顺轨干涉SAR系统概念体制的论证和试验研究[21-22]。
利用顺轨干涉相位反演径向流速属于SAR相位信息的应用,描述顺轨干涉相位与径向流速关系的经验模型。
(4)
式中,u0表示海表径向流速,λ表示雷达波长,V表示平台飞行速度,B表示有效基线长度,θ表示雷达入射角,φ0表示顺轨干涉相位。
取雷达波长为0.24 m,平台飞行速度为7000 m/s,有效基线长度为8.9 m,雷达入射角为40°,考察顺轨干涉相位与径向流速的关系,计算结果如图2所示。
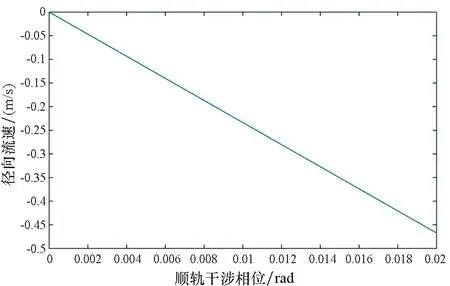
图2 顺轨干涉相位与径向流速的对应关系Fig.2 Correspondence between the along-track interference phase and radial velocity
从图2可知,顺轨干涉相位每0.002 rad的测量误差会带来0.05 m/s左右的径向流速测量误差。相对于雷达后向散射系数的强度信息应用,顺轨干涉相位对于卫星姿态、速度等信息的测量精度要求更高。
2 经典海表流场反演方法
经典海表流场反演方法是Romeiser等基于M4S微波成像仿真模型提出的迭代反演算法,反演流程如图3所示。

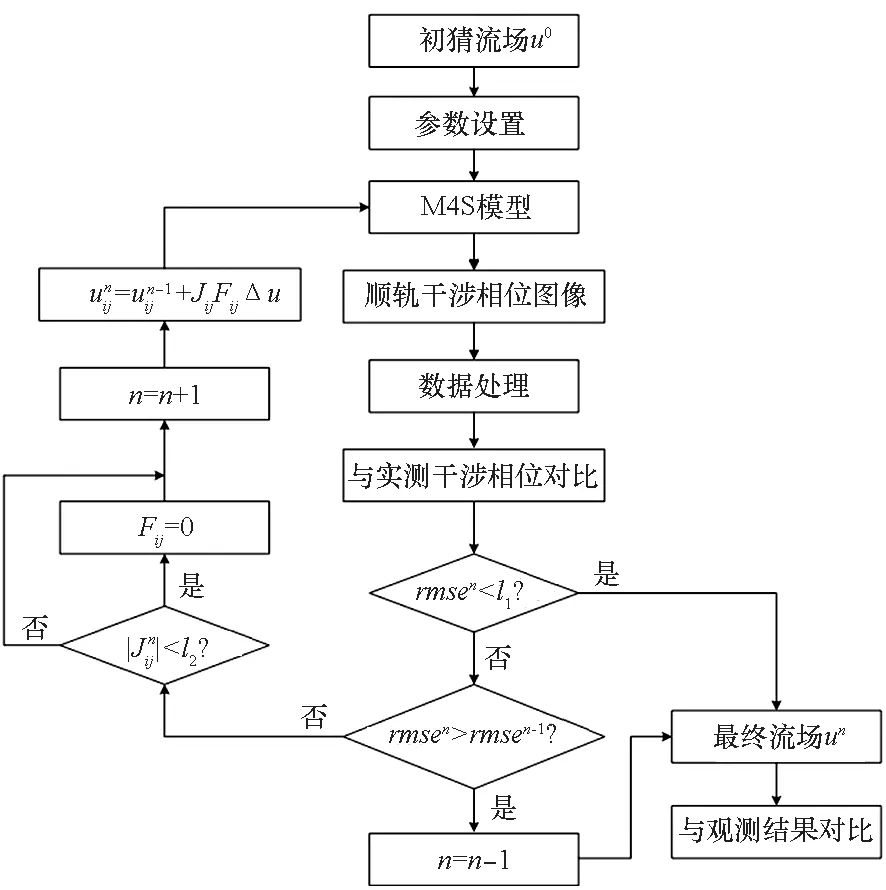
图3 经典海表流场反演算法流程Fig.3 Flow of classical inversion algorithm of ocean surface current
Yu在研究中设置α=0.8。实际迭代计算中发现,不同的雷达和平台参数,需要不同的比例因子来确定校正系数,促使海表流场尽快收敛,同时获取反演最优解。值得注意的是,M4S模型一次迭代计算大约需40 min,有效确定校正系数,对于加快海表流场收敛速度、提高反演效率、实时获取海表流场信息具有重要意义。
3 基于遗传算法的反演方法
3.1 遗传算法计算校正系数
遗传算法(Genetic Algorithm,GA)是一种基于自然选择和基因遗传学原理的全局自适应优化概率搜索算法。它将生物进化原理引入待优化参数形成的编码串群体,同时按照一定的适配值函数和一系列的遗传操作筛选个体,保留适配值高的个体并组成新的群体。随着遗传操作进行,新群体的适应度不断提高,直至满足一定条件。此时,群体中适配值最高的个体即为待优化参数的最优解[23]。基于独有的工作原理,遗传算法可以在复杂空间进行全局优化搜索,且具有非常强的鲁棒性。
遗传算法开展参数优化时,通常采用适应度函数来评价个体的好坏,一般认为适应度函数值越大,解的质量越好。由前文可知,校正系数由有效基线长度、雷达波长、雷达入射角、飞行速度以及比例因子共同决定。其中,雷达和平台参数需在飞行实验中具体设置,而比例因子可以自由选择。由于校正系数通过仿真干涉相位和实测干涉相位的相位差校正海表流场,因此将校正系数设计问题,转化为仿真干涉相位与实测干涉相位差和雷达、平台参数约束条件下的比例因子选择问题。
基于上述讨论,定义干涉相位的偏差δ和均方根误差σ:
δi=φi-φ0
(5)
(6)
进而确定适应度函数的约束关系。
Δu=f(λ,V,B,θ,α,δ,σ)
(7)
通常,为使干涉相位偏差和均方根误差尽快收敛到一定阈值,还需依据实际情况设定干涉相位偏差和均方根误差的约束条件。
在确定适应度函数的基础上,基于MATLAB遗传算法工具箱,给出了校正系数计算的主要操作步骤。
步骤1:设置初始比例因子αi(i=1,2,3,…,n;n取20~30),初始比例因子的值设置跨度较大,例如α1=0.000 1,α2=0.001,α3=0.01,…,αn=1000。
步骤2:建立适应度函数,包含影响校正系数的有效基线长度、雷达波长、雷达入射角、飞行速度以及比例因子等。
步骤3:设置合理的交叉概率和变异概率,避免算法陷入局部最优解。
步骤4:根据雷达和平台参数设置,决定比例因子,计算校正系数,使得干涉相位的偏差和均方根误差快速收敛到设定阈值。
3.2 反演算法改进
将遗传算法计算校正系数引入海表流场迭代反演算法,来加快海表流场收敛速度。改进后的海表流场反演流程如图4所示。
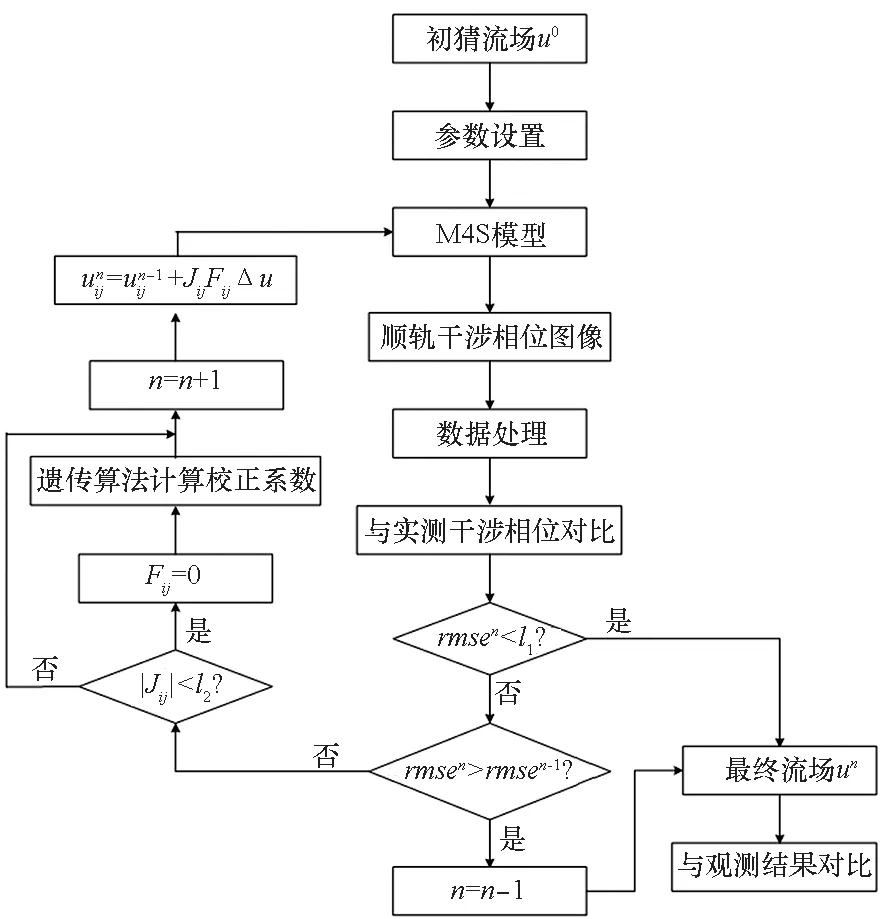
图4 改进后的海表流场反演流程Fig.4 Improved flow of ocean surface current retrieval
依据图4可知,本文提出的海表流场迭代反演算法流程为:
步骤1:首先,利用式(4)通过实测顺轨干涉相位计算初猜流场u0。
步骤2:对海表流场迭代反演过程涉及的参数进行初始化。设置n=1,Fij=1,l1=0.01,l2=0.01。
步骤3:将初猜流场、海面背景风场以及顺轨干涉SAR飞行探测的平台参数、雷达参数输入M4S模型,计算顺轨干涉相位图像。
步骤4:对干涉相位图像进行方位向偏移校正和均值滤波处理。
步骤5:将仿真干涉相位和实测干涉相位进行对比,计算均方根误差rmsen。如果rmsen
步骤7:利用遗传算法计算校正系数,利用每一特定点的校正系数,仿真干涉相位和实测干涉相位的相位差以及校正标志对海表流场进行校正。
步骤8:将校正后的流场输入M4S模型中,重新进入步骤3,进行下一次迭代校正。
4 反演验证
4.1 干涉相位仿真
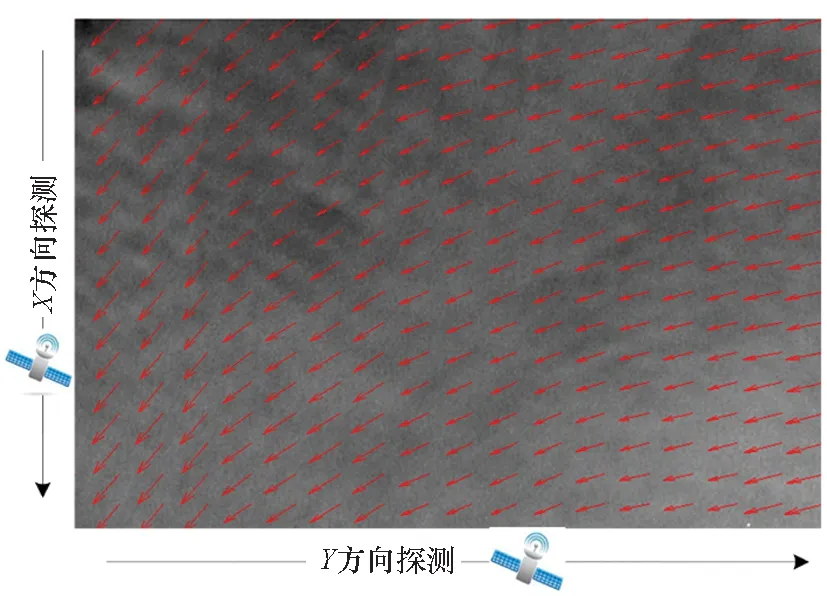
图5 流场数据和星载SAR探测方案Fig.5 Current data and spaceborne SAR sounding scheme
给定一个二维海表流场umin e(100×100,空间间隔为50 m),海面背景风向为53°,风速为10 m/s,如图5所示。星载顺轨干涉SAR的参数设置如表1所示。为了获取二维的海表流场,假设星载SAR(右侧视)沿垂直方向探测(按照雷达视向分别记为X和Y方向),探测方案如图5所示。M4S模型计算的顺轨干涉相位图像如图6所示。
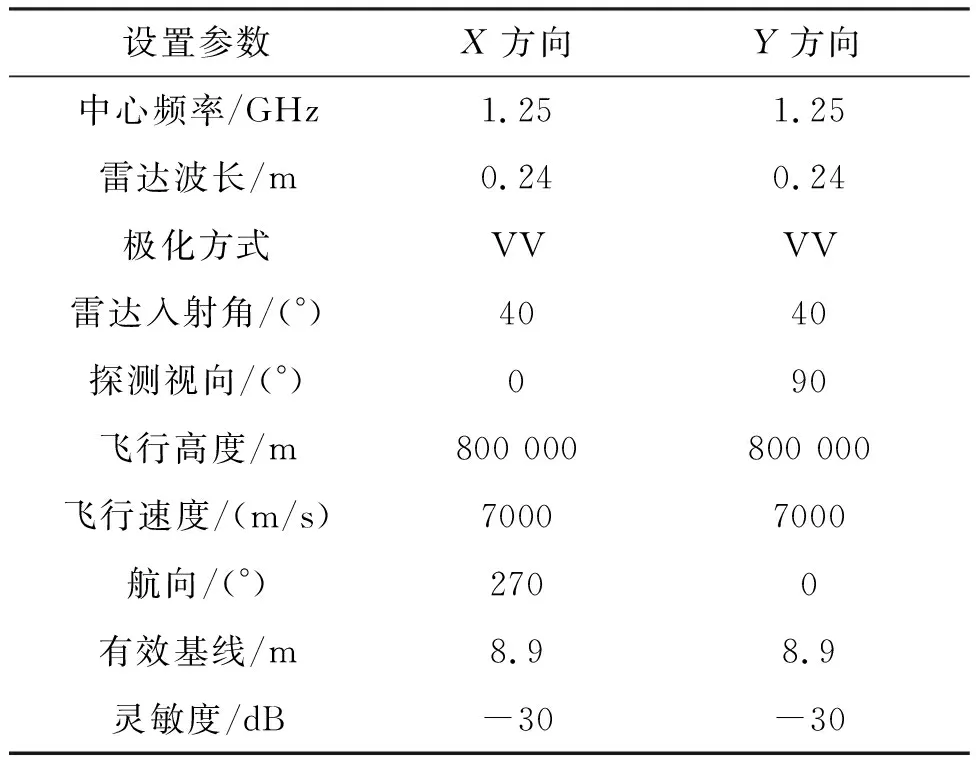
表1 星载顺轨干涉SAR参数设置
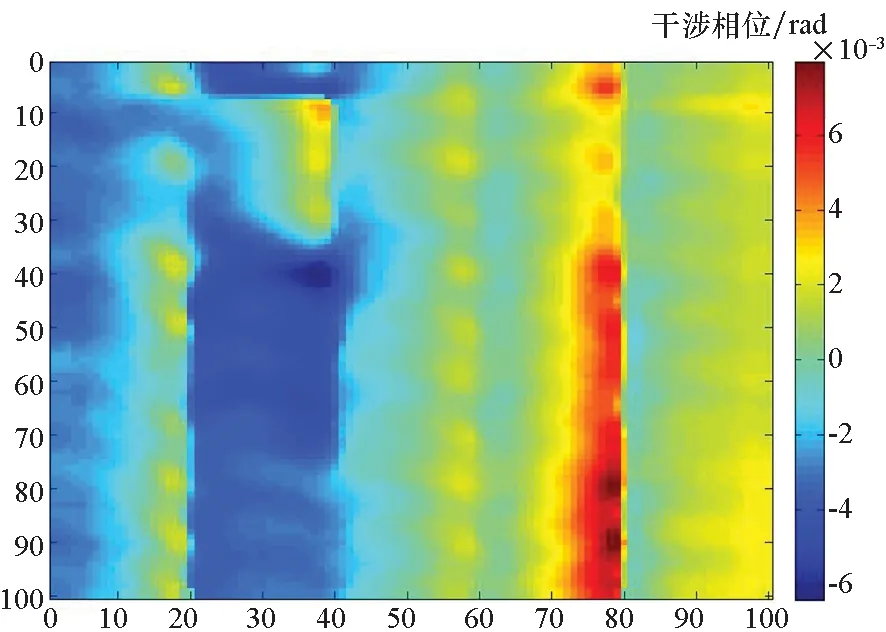
(a) 雷达视向沿X方向探测(a) Radar sight is probed along the X direction
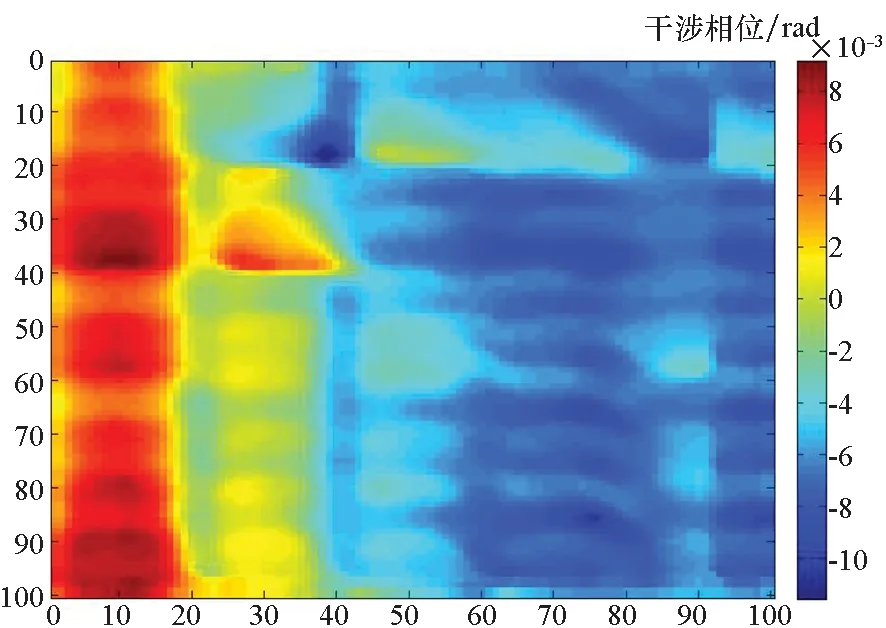
(b) 雷达视向沿Y方向探测(b) Radar sight is probed along the Y direction图6 M4S模型计算的初始顺轨干涉相位Fig.6 Initial interference phase calculated by the M4S model
4.2 反演结果
海表流场的反演结果如图7~9所示。图7描述了反演流场与给定流场(真实流场)的比对分析情况,图8(a)和(b)分别描述了X和Y方向海表流场速度分量的反演结果与真实值比对分析情况,图9(a)和(b)分别描述了海表流向、海表流速的反演结果与真实值比对分析情况。
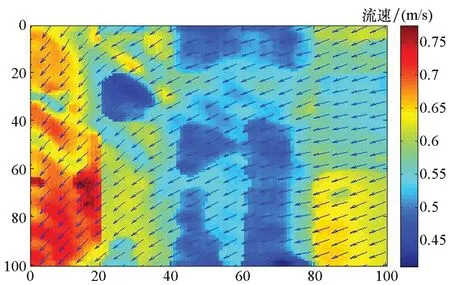
(a) 反演流场(a) Retrieval current
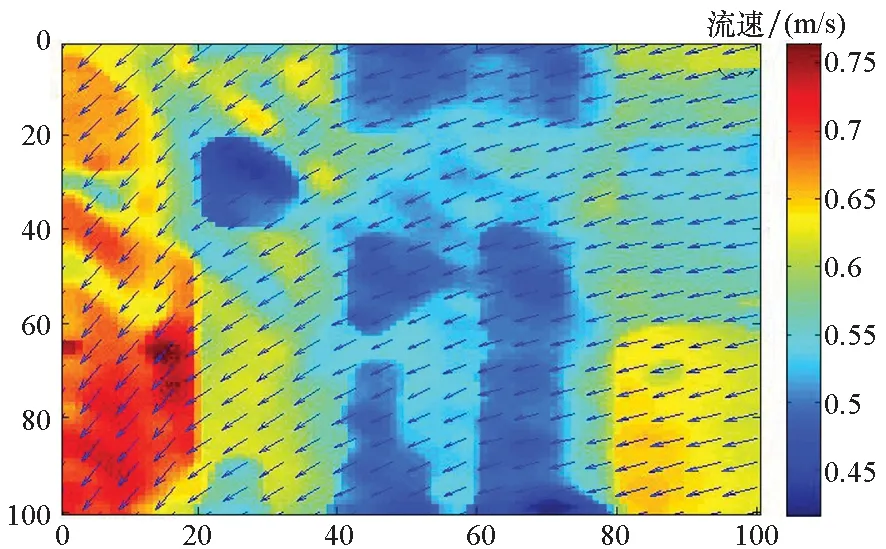
(b) 真实流场(b) Real current图7 反演流场与真实流场的比对分析情况Fig.7 Comparison of the retrieval current and real current
从图8可知,X方向流速分量反演结果的均方根误差为0.052 m/s,偏差为0.002 m/s,Y方向流速分量反演结果的均方根误差为0.045 m/s,偏差为-0.018 m/s。

(a) X方向速度分量(a) X-direction velocity component
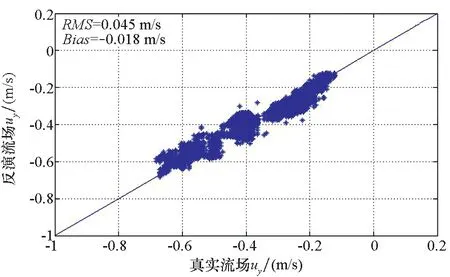
(b) Y方向速度分量(b) Y-direction velocity component图8 X和Y方向速度分量的反演结果与真实值比对分析情况Fig.8 Comparison between the retrieval results of velocity components in X and Y directions and the true values
(a) 海表流向比对(a) Ocean surface current direction alignment
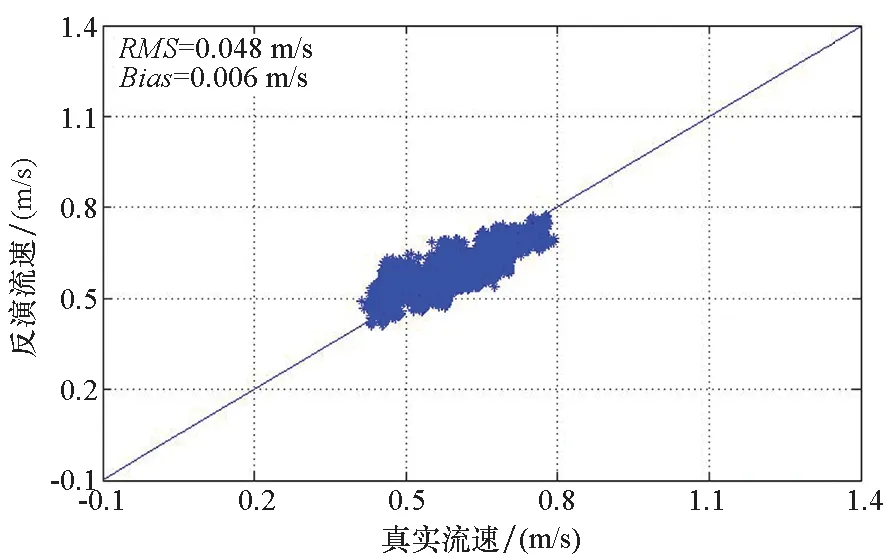
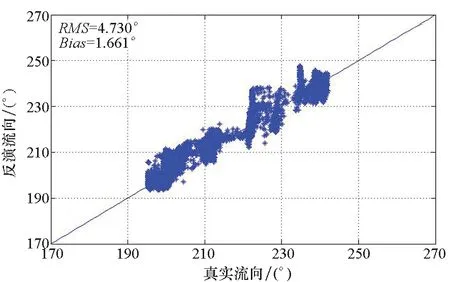
(b) 海表流速比对(b) Ocean surface current speed alignment图9 海表流向、流速的反演结果与真实值比对分析情况Fig.9 Comparison between the retrieval current direction and speed and the true value
从图9可知,海表流向反演的均方根误差为4.730°,偏差为1.661°,海表流速反演的均方根误差为0.048 m/s,偏差为0.006 m/s。
本次试验中,采用遗传算法计算校正系数后需4次迭代完成计算,而采用固定步长反演海表流场达到同等精度的迭代次数为6次。1次迭代计算耗时约为40 min。从试验结果可看出,本文方法可以有效提高迭代效率。
4.3 不同雷达入射角、风速条件下反演情况分析
为了进一步验证反演方法,采用表1的星载顺轨干涉SAR参数设置,考察在风速为10 m/s条件下,雷达入射角为30°、 40°和50°时海表流场的反演情况,结果如表2所示。
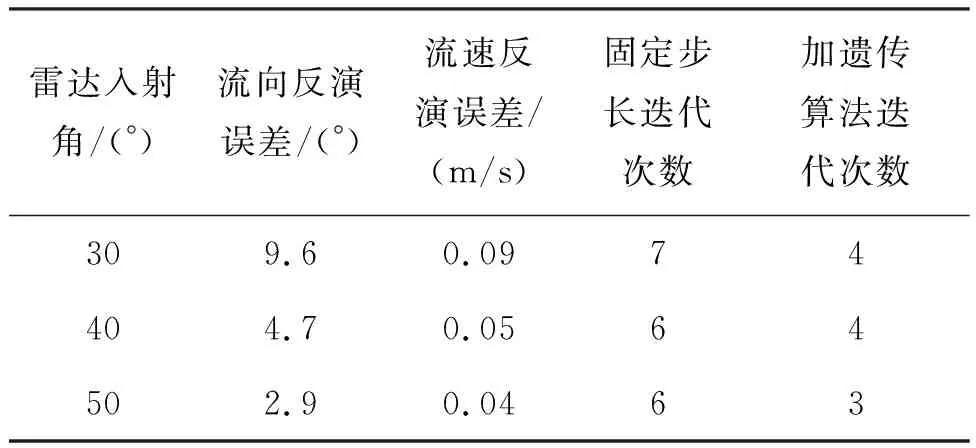
表2 不同雷达入射角条件下海表流场反演情况
从表2可知,海表流向反演的均方根误差优于10.0°,海表流速反演的均方根误差优于0.1 m/s,满足反演精度要求。
不同雷达入射角条件下,大入射角时的反演精度优于小入射角时的反演精度。这表明大入射角有利于获取海面单元与天线视向的相对径向运动,符合海面径向速度的测量原理。
同样,采用表1的参数设置,考察在雷达入射角为40°条件下,风速为5 m/s、10 m/s和15 m/s时,海表流场的反演情况,结果如表3所示。

表3 不同风速条件下海表流场反演情况
从表3可知,海表流向反演的均方根误差优于10.0°,海表流速反演的均方根误差优于0.1 m/s,满足反演精度要求。
不同风速条件下,高风速时的反演精度低于低风速时的反演精度。这是因为海面风场同样会产生海洋表面运动,风速越大对于径向速度的影响越大,带来的流速测量误差也越大。
综合表2、表3可知,在同等反演精度条件下,经典固定步长反演流场的迭代次数为6~8,增加遗传算法后的迭代次数为3~4。遗传算法优化后可减少2~3次迭代,按每次迭代需用时40 min计,可节约用时2 h左右。
5 结论
本文针对海表流场迭代反演算法的时效性需求,依据校正系数的参数特点构建适应度函数的约束关系,设计了遗传算法计算校正系数的技术方法,并嵌入海表流场迭代反演算法来加快收敛速度。该方法利用仿真顺轨干涉相位和实测顺轨干涉相位的迭代计算来直接反演径向流速,通过干涉相位的整体最优匹配回避了从多普勒速度分离径向流速的问题,保证了海表流场的反演精度。
星载SAR数据仿真实验结果表明:海表流向反演的均方根误差优于10.0°,海表流速的均方根误差优于0.1 m/s,符合反演精度要求。而由遗传算法改进的反演算法可减少2~3次迭代,节约用时2 h左右,有效提高了海表流场反演效率。
受试验条件限制,本文研究主要针对仿真的星载SAR数据,未能采用实测数据验证反演方法。未来随着国内机载SAR海洋环境探测试验的开展,将借助机载SAR实测数据验证、优化反演算法。
M4S模型作为一个公开发布的SAR成像仿真研究模型,其模拟的雷达后向散射系数和顺轨干涉相位与实际观测值存在一定系统偏差。在现阶段,仍需借助M4S模型来开展海表流场的反演研究,但应注意对其成像系统偏差的统计分析。随着我国星载顺轨干涉SAR海洋环境应用的进一步展开,基于SAR探测数据和比对观测数据建立径向流速反演的经验模型,是解决海表流场反演问题的重要方向。
致谢
感谢美国迈阿密大学的Roland Romeiser教授提供的M4S软件和对软件使用上给予的帮助。
