内埋式永磁同步电机初始位置检测方法的比较与改进
2020-12-07韩松杉周明磊游小杰王琛琛
韩松杉,周明磊,游小杰,王琛琛
(1.内蒙古电力调度控制中心,内蒙古 呼和浩特 010020; 2.北京交通大学 电气工程学院,北京 100044)
相较于异步电机,永磁同步电机(PMSM)具有体积小、效率和功率因数高、宽调速范围等优点。随着PMSM的控制和设计技术的提高,PMSM的应用场合也不断扩展,已经被成功的应用于地铁和高速动车组[1]。对于PMSM,转子初始位置误差可能会造成电机启动失败、控制性能变差等后果。目前无位置传感器控制系统,电机启动时需检测转子角度;而对于有位置传感器的控制系统,位置传感器安装、更换后,传感器测得的角度往往与转子角度存在固定偏差,需要校正。因此,准确的估算初始位置,对于有、无位置传感器的控制系统都具有重要意义。
目前国内外学者已经针对该问题开展了广泛的研究,并发表大量文献。总体上可以分为以下几类:①预定位法[2];②电压脉冲注入法[3-9];③高频电压注入法[9-17]。文献[2]介绍了预定位法,该方法将静止的电流矢量通入电机定子中,产生的转矩将转子定位到指定角度。安装在列车上的牵引电机,在检测过程中需要保证转子静止,防止列车发生移动,该方法显然并不适用。其余两类方法在检测转子位置时均不会造成转子的转动。注入电压脉冲的方法主要有两类,文献[3-5]利用短时电压脉冲及响应电流,从电机数学模型中求解出转子角度,本文称为直接计算法。文献[6-9]利用电压矢量脉冲越接近d轴,响应电流幅值越大的原理来逼近转子位置,本文将其称之为逐次逼近法。文献[10-17]主要介绍了高频旋转、高频脉振电压注入法。该类方法向电机注入高频电压,其响应电流经过相应的信号处理算法之后,即可估算出转子角度。相对于其他方法,高频电压注入法计算速度快,并可应用于低转速下的无位置控制。
上述方法各有特点,本文以内埋式永磁同步电机(IPMSM)为研究对象,主要对广泛使用的逐次逼近法和两种高频电压注入法进行研究。考虑到轨道交通变流器开关频率低、死区时间大的特点,分析了死区等非线性因素对估算精度的影响。除高频脉振电压注入法外,其余两种方法受非线性因素影响大、估算精度低,与分析、实验结果相符。在此基础上,对误差较大的方法提出了改进措施。最后对文中三种方法及其改进算法进行验证、对比分析,证明了改进算法的有效性。
1 IPMSM数学模型
转速为零时,IPMSM在α-β坐标系下的电压方程为[1]
(1)
式中:uα、uβ、iα、iβ分别为定子电压、电流在α-β坐标系下的分量;Rs为定子电阻;p为微分算子;Ld、Lq分别为d、q轴电感;L1=(Ld+Lq)/2,L2=(Ld-Lq)/2;θr为转子角度。凸极机的转子位置会影响电机电感,反之也可利用电机电感来求解转子位置。由式(1)可知,定子电感仅与2θr相关,因此还需要利用电机的饱和特性来进一步区分θr和θr+π两个角度(永磁体N极、S极)。
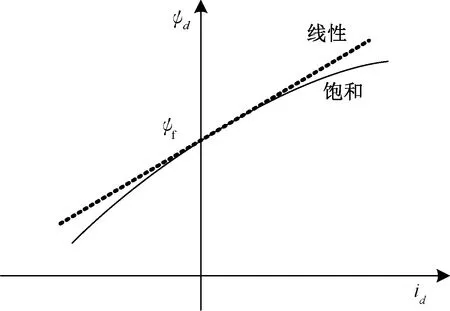
图1 同步坐标系下IPMSM饱和特性曲线
图1中展示了d轴磁链与电流的关系,id、ψd分别是电机d轴电流与磁链;ψf为永磁体磁链[10]。当电流产生的磁链与ψf同向时,电流的增大会加剧定子铁芯的饱和,使得Ld变小。可利用这一特性来检测转子的极性。
2 逐次逼近法及其改进措施
向电机注入等宽电压脉冲检测初始位置的方法主要有两类:直接计算法和逐次逼近法。直接计算法利用电压电流反解电感矩阵,受采样精度、饱和效应影响较大,所以本文主要对逐次逼近法进行研究。
2.1 基本原理
向IPMSM注入等幅电压脉冲,电感和转子位置的关系反应在电流幅值中,电流幅值最大的脉冲,其角度离θr最近。即使对于隐极机,饱和效应同样会导致d、q轴电感的差异,利用这一特性也可计算得到转子角度。因此,该方法也可应用于隐极机的转子初始角检测[6]。在α-β坐标系下,向电机注入幅值为U,角度为δ的电压矢量,其在α-β坐标系下的分量uα、uβ为
(2)
将公式(2)代入式(1),考虑到注入电压脉冲的持续时间很短,是一个高频分量,因此可忽略定子电阻压降。不计饱和效应时,响应电流峰值Im的表达式为
(3)
当δ=θr或θr+π时,响应电流峰值最大
(4)
当δ=θr+π/2或θr+3π/2时,响应电流幅值最小
(5)
考虑到定子电感的饱和,角度为θr的电压矢量的响应电流幅值最大。依据这一原理可确定转子位置。在公式(4)的基础上,结合电机额定电流可确定注入电压矢量的幅值和持续时间。
实验中,θr=90.5°时等幅值电压脉冲响应电流随电压角度的变化曲线见图2。当电压脉冲角度等于θr时,电流取到最大值。确定转子大致角度后,可在其周围以更小的角度间隔发电压脉冲,来获取更精确的转子角度。
注入的电压脉冲,会在定子铁芯中留有剩磁,逐渐累加后,会影响观测精度。为了减小剩磁的影响,注入电机的脉冲尽量与前一个脉冲角度相差180°,可依次为0°、180°、10°、190°、…此外,该方法的精度还取决于以下两个因素:
(1)逆变器非线性因素。受到死区、开关管导通压降等因素的影响,作用于电机的电压脉冲并不完全与指令值相同。且注入电压、响应电流均为脉冲形式,难以补偿。
(2)电流采样精度。AD采样的分辨率直接限制了角度估算的分辨率,而非电压脉冲的角度间隔。
本文提出一种降低上述因素影响的方法:在同一角度,注入两个幅值不同的电压脉冲,将响应电流作差,用于逼近转子位置可抵消非理想因素的影响。
2.2 改进措施


图3 电压矢量示意图
结合图3,将V1、V2相减,得到的差向量ΔV方向与指令电压相同。结合公式(1),忽略定子电阻后,电机可看作线性系统。由叠加原理可知,ΔV的响应电流ΔI等效于V1、V2响应电流I1、I2之差。用ΔI来估算转子位置,即可抵消上述因素影响。在α-β坐标系下,V1、V2可表示为
(6)
式中:u1α、u1β,u2α、u2β分别为V1、V2在α-β轴的分量。忽略定子电阻,ΔV的等效响应电流为
(7)
式中:i1α、i1β和i2α、i2β分别为I1、I2在α-β坐标系下的分量;L11、L12、L21、L22为电感矩阵相应元素;Δiα、Δiβ为电流矢量差ΔI的两个分量。
改进后的逐次逼近法,在每个角度注入两个不同幅值的电压矢量,通过比较其电流矢差的幅值,即可准确确定转子位置。该方法可减小逆变器非线性因素的影响,提高计算精度。
3 高频电压注入法
高频注入法是一类适用于低速的无位置传感器算法,也可以应用于初始位置检测。依照注入电压信号的形式,可以分为高频旋转电压注入法和高频脉振电压注入法。
3.1 高频旋转电压注入法及改进措施3.1.1 基本原理
向定子注入幅值为Vinj,角频率为ωc的高频旋转电压Vinj·ejωct,通过复矢量形式的电压方程求解得[11]响应电流为
(8)

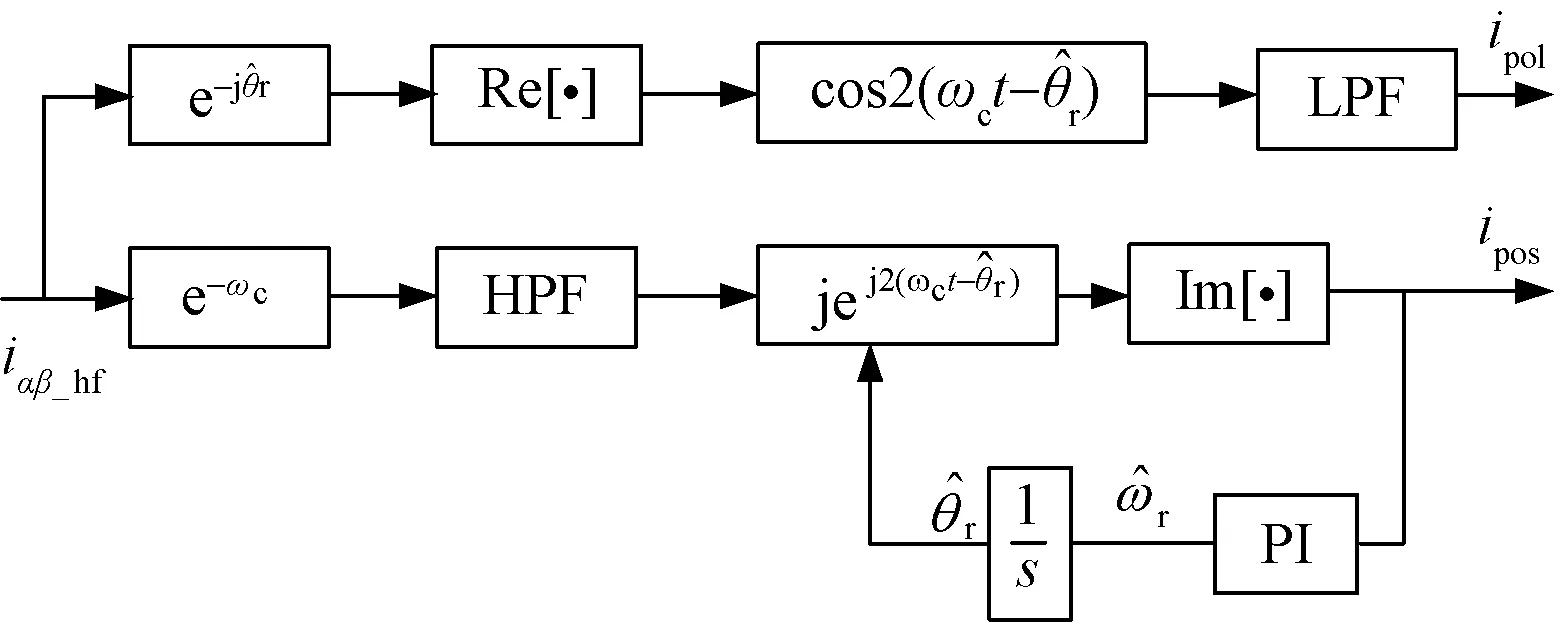
图4 高频旋转电压注入法信号处理流程
依据图4中算法,将采样得到的高频响应电流提取出用于锁相的电流ipos
(9)
(10)

用实际电压uαβ_hf计算得到电流为

(11)
(12)
3.1.2 改进的高频旋转电压注入法
本文提出一种补偿策略,可以对各种非理想因素导致的电压相位的误差进行整体的补偿,具体原理见图5。
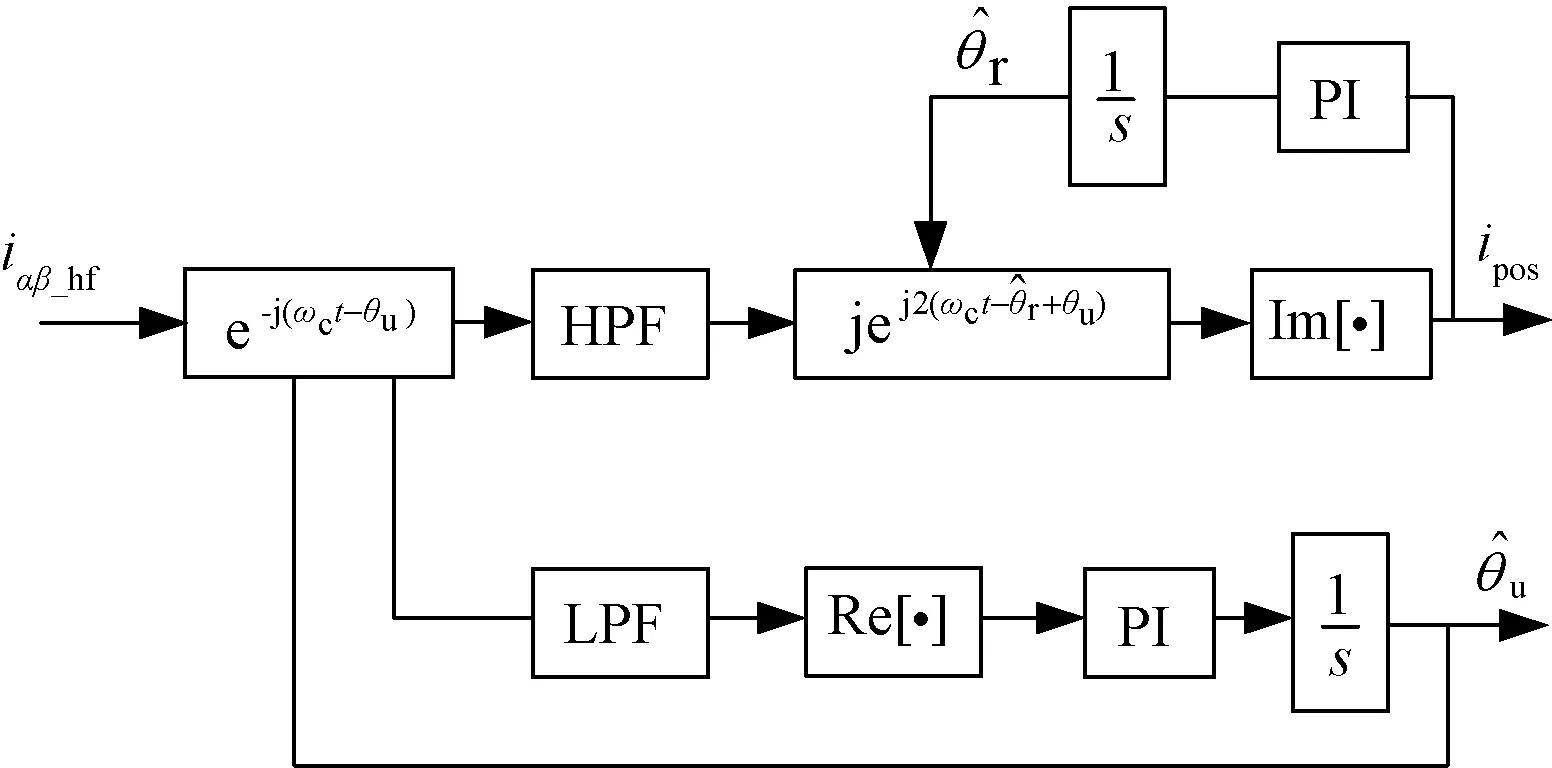
图5 电压相角补偿算法
估算转子角度时,需要用到高频电压的相位ωct。理想情况下,高频电压指令值的相位就等于实际值,同时也等于正序电流的相位。考虑到非线性因素,指令电压相位不再等于实际电压相位。此时,正序电流相位仍与电压实际值相位相同,可以通过正序电流来间接的获取电压相位,校正计算结果。
假设电压指令值的相位与正序分量相位的角度差为θu,将高频电流旋转至正序分量的同步旋转坐标系下,正序分量为直流量,负序分量为变为2倍频率的交流量。通过低通滤波器可得到正序电流ip
(13)

(14)
当锁相环稳定后,ωct+θu即为正序电流的相位,也是电压实际值的相位。用ωct+θu代替电压指令值的相位ωct,即可实现对电压相位误差准确补偿。从而提高避免了死区、计算和控制延时等因素对估算结果的影响。
3.2 高频脉振电压注入法
(15)
式(15)为静止坐标系下的响应电流,最后一项是饱和分量,可以用来判别转子极性。在位置计算时,饱和分量幅值较小,可以忽略。信号处理算法见图6。
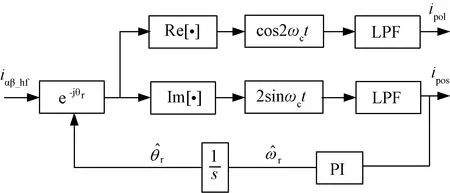
图6 高频脉振电压注入法信号处理流程
采样得到的高频电流经过图6中所示算法,得到用于锁相的电流分量
(16)
高频脉振电压注入法可能存在着与高频旋转电压注入法相同的问题。由于延时、死区时间等因素的影响,电压的幅值、相位会发生变化。在某一个估算的转子角度下,非线性因素对实际输出电压的影响体现在幅值、相位两方面。这里假设注入电压的实际值uαβ_hf为
(17)


(18)
用于锁相的电流分量也随之改变
(19)

据此可以得到结论,死区时间等非线性因素几乎不会影响高频脉振电压注入法的计算结果,这也是该方法的优势。
4 实验结果
利用实验室的3.3 kW IPMSM实验平台,对本文中分析的三种转子初始位置估算方法进行了相应的实验,以便于综合比较,电机参数见表1。
实验中控制器采用DSP芯片TMS320F28335作为控制核心,逆变器开关频率为750 Hz,死区时间15 μs,直流母线电压540 V。
图7中电压、电流波形展示了逐次逼近法的两个阶段:先每隔10°发一组电压脉冲,找出最接近转子的角度;再在其周围采用2.2节中的改进算法,以更小的角度间隔逼近转子位置,其波形见图7(b)。
图8为逐次逼近法改进前后的实验结果,改进前注入的电压幅值为50 V,持续2个开关周期。改进后注入的电压脉冲分别为50 V、2个开关周期和50 V、1个开关周期(可等效为25 V、2个开关周期的电压脉冲)。
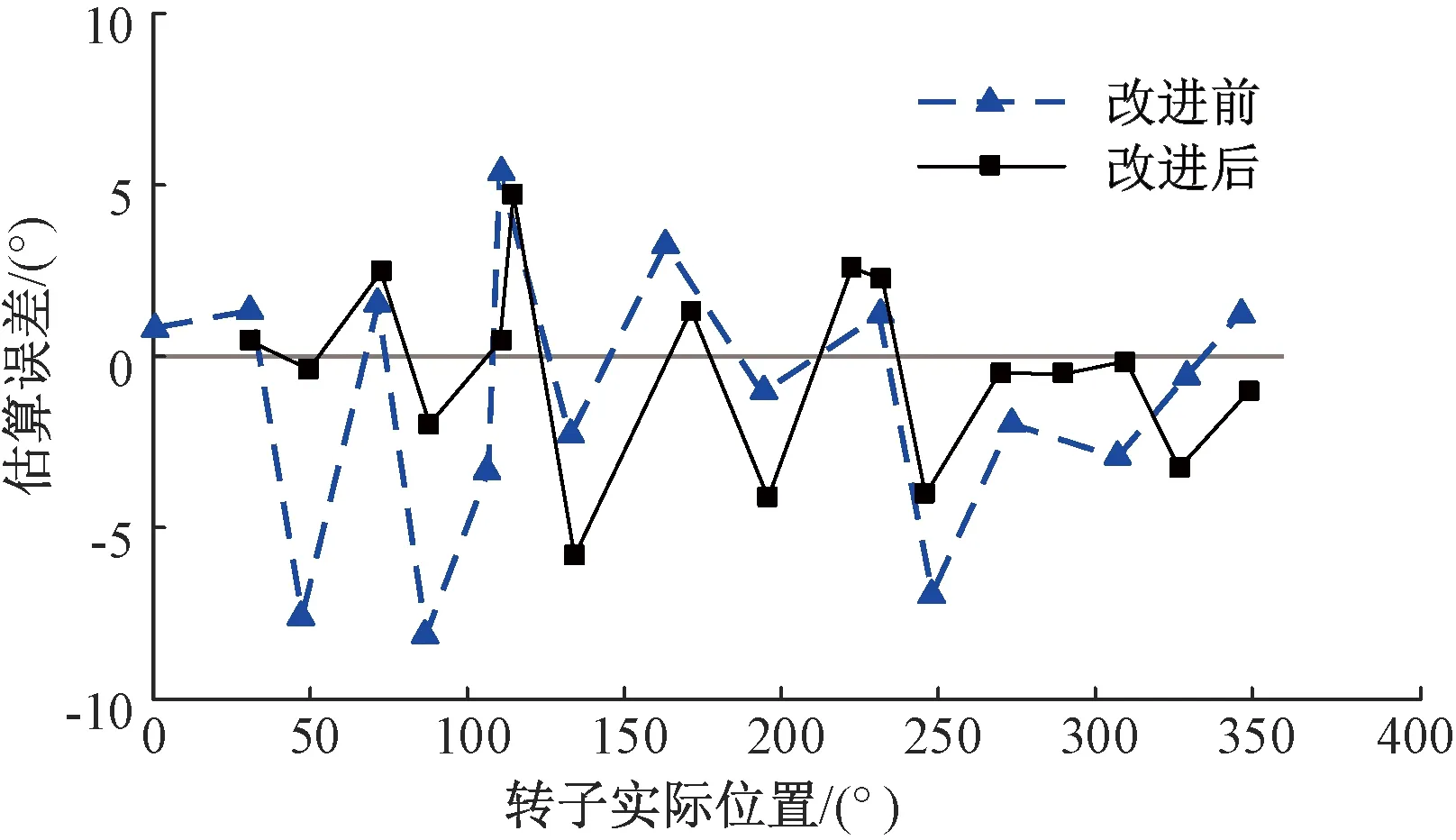
图8 逐次逼近法估算结果
改进前的逐次逼近法最大估算误差接近9°;改进后误差在±5°以内,明显减小,证明了改进算法的有效性。
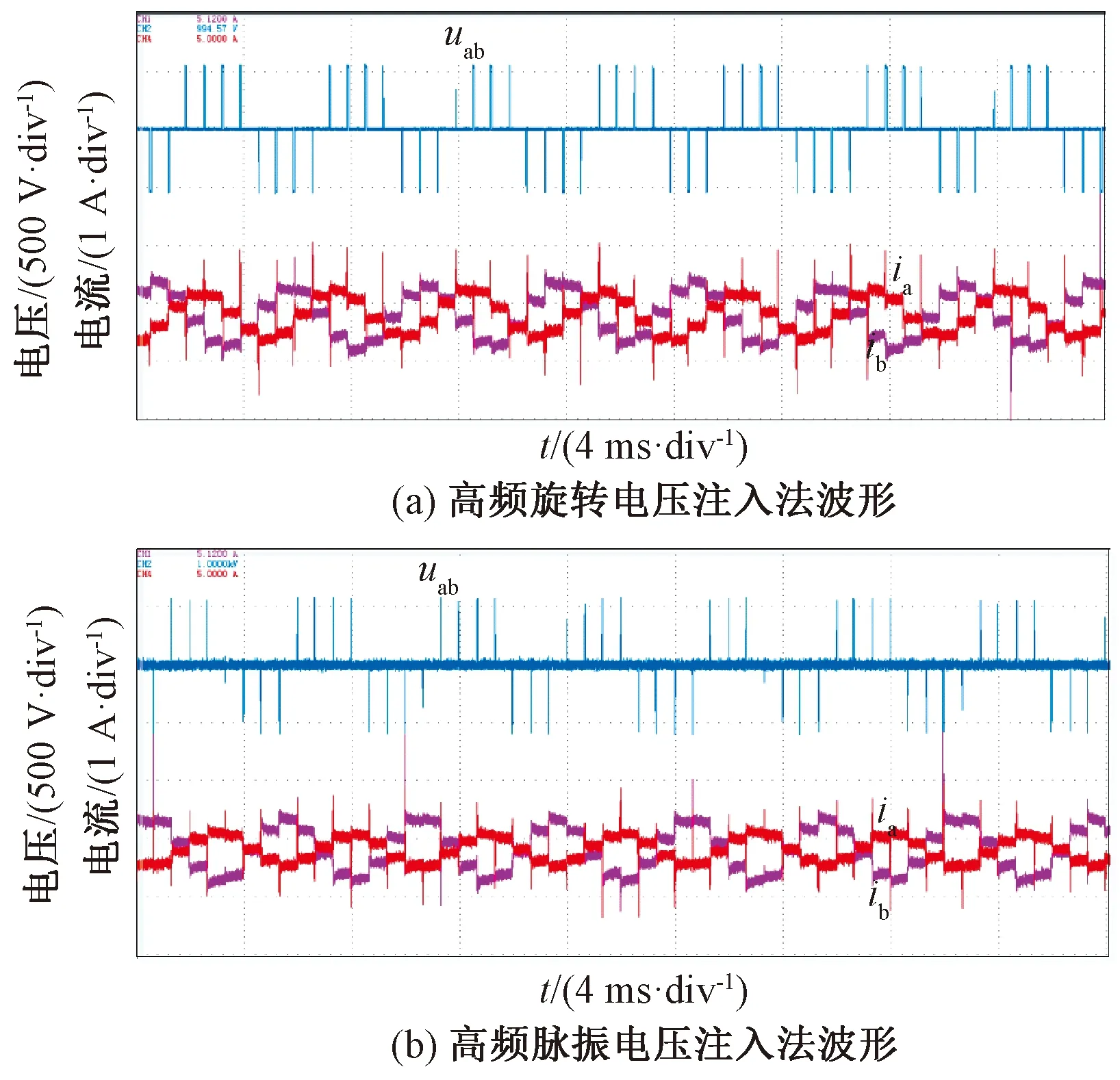
图9 高频电压注入法实验波形
图9为两种高频电压注入法的实验波形,实验中注入的高频电压幅值均为30 V,频率也同为200 Hz。

图10 高频旋转电压注入法估算结果
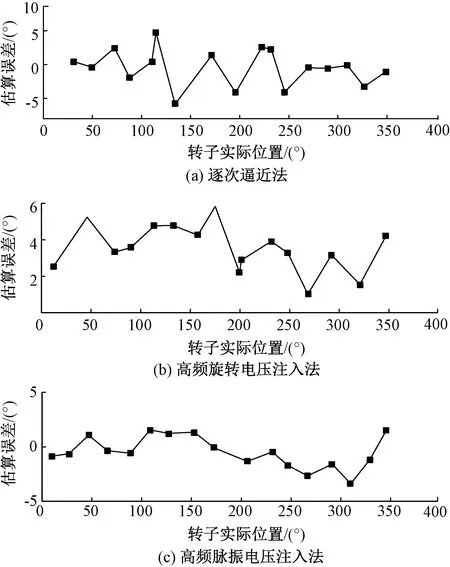
图11 四种方法估算结果
图10中高频旋转电压注入法改进前最大误差角度为14°,并且计算结果存在较大偏置,与上文中分析相吻合;改进后误差减小到6°以内,角度偏置有了明显的减小,证明了改进算法的有效性。
为了便于对比,图11中分别展示了文中三种检测算法的实验结果。其中高频脉振电压注入法受非理想因素影响较小,精度也最高。改进后的逐次逼近法非理想因素得到一定的补偿,计算精度接近高频脉振电压注入法。改进后的高频电压注入法估算估算误差大于前两种方法。
5 结论
本文通过对实际应用较多的几种IPMSM初始位置检测方法分析、改进和实验验证,得到以下结论:
(1)逐次逼近法的估算精度会受到死区等非理想因素的影响,采用本文中的改进方法可明显提高其精度。该方法实现简单,并可应用于隐极机。但是需要依次注入多个电压脉冲,估算时间较长。
(2)两种高频电压注入法检测速度较快,其中高频脉振电压注入法受非线性因数影响最小,产生的转矩脉动小,精度也最高;高频旋转电压注入法改进前受非理想因素影响导致观测误差偏大,改进后误差明显减小。这两种方法均需调节滤波器、锁相环参数,实现难度较大。
(3)高频注入法可扩展至低速运行电机的位置检测,而逐次逼近法只能在电机静止时检测初始位置。
总体而言,改进后的逐次逼近法和脉振电压注入法相对更优。以上几种方法产生的转矩很小,在空载时也不会造成电机的转动。在实际应用中可以根据具体应用场合和指标要求选择最合适的方法。