基于stc89c51单片机的扫地机器人设计
2020-11-30陈学谊
陈学谊
摘 要 扫地机器人作为一种可代替人类进行房间清扫的家用机器人之一,由于其方便性,因此在目前社会中具有良好的发展前景与运用前景。本文主要阐述如何设计与制作一個具有自动清扫,自动避障,定时清扫的功能简易扫地机器人。此扫地机器人由总控制电路,电源电路,定时器电路,及电机驱动电路构成。本扫地机器人的核心为stc89c52单片机,此单片机运用简单,效率高且成本低,可以良好的实现扫地机器人所需求的基本功能。本扫地机器人还具有定时功能,可以在一定时间后自动关闭,因此可以到达节约用电的目的。
关键词 扫地机器人;自动避障;定时电路;stc89c52单片机
概述
随着第一台扫地机器人在1997年由瑞典伊莱克斯生产开始,扫地机器人至今已经拥有了二十余年的发展历史。随着近代科学技术的不断发展与革新,扫地机器人也由最开始的只可以进行简单的清扫功能的傻瓜模式,慢慢发展成了具有许多不同功能,如自动避障功能,路径规划功能,定时清扫功能,语音控制功能等不同功能的智能扫地机器人。而人们对于扫地机器人的需求程度也越来越高,因此,扫地机器人在我国具有良好的前进。
本文主要从电路设计方面着手,简单讲述如何设计一个由总控制电路,电源电路,电机驱动电路和定时器电路这四大电路构成的简易扫地机器人。且为了节约制作成本,提高制作效率,我们可以先利用电脑对我们设计的扫地机器人电路进行仿真测试。其主要设计过程为:理论设计——仿真实验测试——仿真结果分析——电路制作——实物测试——结果分析。
1总控制电路
stc89c52作为应用最为广泛的单片机之一,价格便宜,工作效率高且用于简单,是作为扫地机器人的总控制芯片的最好选择之一。此单片机拥有四组八位可编程的I/O口,分别为
P0口:由P0.0至P0.7的8位双向I/O口线(Pin39-Pin32)。
P1口:由P1.0至P1.7的8位双向I/O口线(Pin1-Pin8)。
P2口:由P2.0至P2.7的8位双向I/O口线(Pin21-Pin28)。
P3口:由P3.0至P3.7的8位双向I/O口线(Pin10-Pin17)。
可对此单片机的每根引脚都进行编程,因此,此单片机可实现多种不同功能。
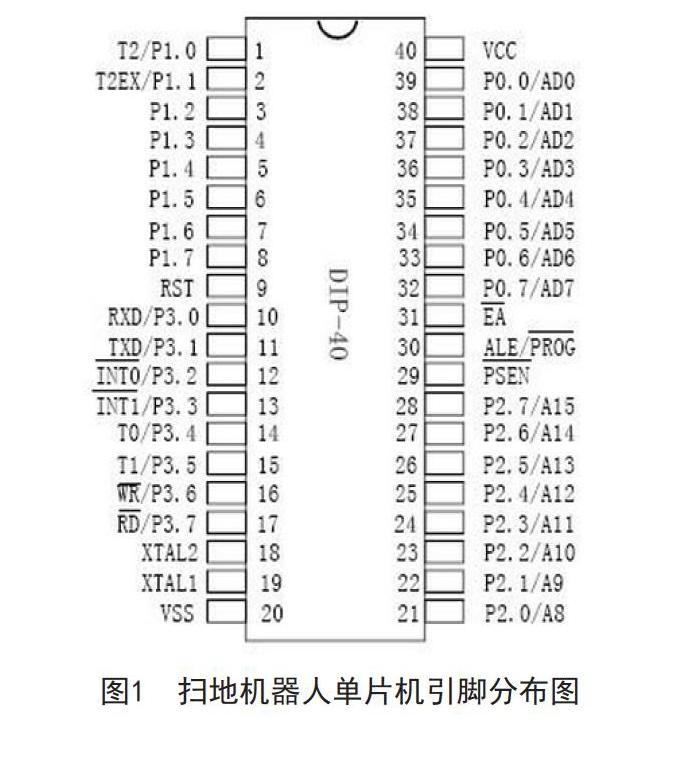
此电路以stc89c52单片机为核心,引脚分布图如图1所示,其中:
P3.0与P3.1与超声波探测头相连接,用于检测前方十分有障碍物。
P3.6、P3.7、P1.4、P1.5、P1.6、P1.7与L298N模块相连,负责控制左电机和右电机。
P2.1、P2.2、P2.3与ULN2003A相连,负责控制左边刷,右边刷和吸尘器相连。
P0.0-PO.7、P2.5、P2.6、P2.7与液晶模块相连。
P2.0与蜂鸣器相连。
P3.2-P3.5与按键模块相连。
P1.1、P1.2、P1.3与时间芯片相连。
总控制电路作为整个扫地机器人的核心电路,具有协调各模块,控制各模块的功能,使此扫地机器人可完成清扫,定时,报警,移动等功能。
2电源电路
电源模块的选择非常重要,它决定了整个电路的稳定性。如电源电压过高,可能会出导致元器件被烧坏,甚至是损坏整个电路。而如果电源电压过低,则可能出现电源无法带动整个电路,扫地机器人无法正常工作的情况。因此,可以选择LM7805作为电源。此电源的输出电压为5V,最大输出电流为1A,符合我们对于扫地机器人基本功能的应用,并且具有热过载保护,短路保护,输出晶体管安全工作区域保护的优点,因此可以很好的带动我们的扫地机器人进行工作[1]。
3电机驱动电路
电机驱动电路负责控制驱动左边刷,右边刷,吸尘器,还负责控制左电机,右电机的工作,正转及反转。
其中,左边刷,右边刷和吸尘器的工作由ULN2003A控制。ULN2003作为一种大电流驱动阵列,在电路中主要应用于继电器驱动,步进电机驱动,伺服电机驱动等,并具有电流增益大、温度范围宽、负载能力强等优点,适用于各种要求高速大功率的系统开车。所以我们用它来驱动左边刷,右边刷,吸尘器。
且对于吸尘器的选择,不可使用功率太大的吸尘器,否则会出现带不动,甚至是烧毁电路的情况。而左电机,右电机的工作,由L298N芯片控制。L298N芯片作为最常被运用的电机驱动模块之一,可实现电机的正反转及调速,并且L298N芯片可以同时驱动两台直流电机,因此可以很好的运用与我们的扫地机器人,对其左电机及右电机进行驱动控制。
4定时器电路
定时模块用于控制清扫机器人的工作时间,使其在人员离开后自动关闭,有助于节约电能。设置计时器的停止时间。当时间与设定的停止时间相同时,模块控制清扫机器人停止工作。定时器模块由定时器主电路、液晶显示模块和时钟部分三部分组成。这三部分共同控制定时器模块的整个电路,并能够帮助扫地机器人实现自动关闭,时间设置及调整时间的功能。此定时器电路采用STC89C52芯片作为主控核心,与扫地机器人的总控制电路为一体,对扫地机器人的工作进行控制。引脚p0—p7,p25,p26,p27与液晶模块相连接,用于显示时间信息。引脚p11,p12,p13与时钟芯片DS1302相连接,用于提供时间信息。引脚p32,p33,p34,p35与按键按钮相连接,用于调整设定时间或者此定时器的初始时间。引脚RESET与一个电容和一个电阻相连接,当此电容充满电时,电容断开,RESET的电压下降为0V,此时单片机开始执行代码,进行工作。这个设计可以使单片机在一段时间的延迟后再执行代码,从而实现保护单片机的目的。此电路中,引脚XTAL1与XTAL2和晶振相连;VCC与电源相连;GND与地相连;X1 X2与晶振相连,用于提供脉冲,使这个芯片工作。RST,IO,SCLK分别对应着小时、分钟、秒。并且,在这个电路中,VCC1与后备电池相连,使其即使在断电情况下,也可以正常工作,从而保证了时间的准确性,让我们不用在每一次使用扫地机器人之前,还要对时间进行调整。
5结束语
本文对扫地机器人设计与制作了一个扫地机器人,并对其进行了实验和分析。此扫地机器人的主要功能有自动清扫:利用边刷及吸尘器将地面的灰尘,垃圾进行自动清理,为人们节省了扫地时间;自动避障:利用超声波对前方障碍物进行探测,如有障碍物,则自动进行拐弯,防止了扫地机器人与屋内物件发生碰撞;定时清扫:可设置一个停止工作时间,当时间与停止工作时间一致时,扫地机器人则自动关闭,从而可以节约用电。在对电路进行调试的过程中,发现了元器件的选择的重要性,即使功能相同,不同的元器件的选择也会带来不同的测试结果,甚至如果选错了元器件,可能会造成电路的损坏。通过扫地机器人的不断实验与分析,最终发现了最适合的元器件及连接方式。
参考文献
[1] 姜楠.基于STC89C51单片机的红外遥控智能家居系统设计[J].现代电子技术,2012(24):162-164.