四旋翼飞行器的自抗扰控制研究
2020-11-30李定聪庞中秋
李定聪 庞中秋

摘 要 本文将根据四旋翼飞行器的动力学模型和数学模型,设计自抗扰控制器,并利用MATLAB-Simulink模块搭建其控制器,对其系统进行解耦控制,优化整定控制器参数。仿真实验实现对其高度和姿态的稳定控制,对其的稳定性、抗扰性、鲁棒性进行分析。
关键词 四旋翼飞行器;自抗扰控制技术;Simulink
Abstract In this paper, the auto-disturbance Rejection Controller (ADRC) is designed according to the dynamic model and mathematical model of four-rotor aircraft, and the controller is built with MATLAB-Simulink module to decouple the system. Optimal Tuning of controller parameters. The simulation experiment realizes the stability control of its altitude and attitude, and analyzes its stability, anti-disturbance and robustness.
Key words Quadcopter; Active Disturbance Rejection Control; Simulink
引言
进入21世纪,由于微电子系统和飞行控制、能源动力等技术研究的成熟,旋翼飞行器的自动控制器顺势而生,为控制技术的发展带来了前所未有的机遇,许多的学者专家加入到对旋翼飞行器的研究和探索之中,因此飞行器的性能和结构也逐渐得到了优化。目前,四旋翼飞行器主要应用于军事和民用领域,在民用领域能够代替人类去完成某些任务, 在军事领域上由于其结构简易,机动性较为灵活,在装备了具有杀伤性武器后有很强的战斗能力。所以在国内外都有许多研究机构对于四旋翼飞行器都进行了深入的研究。
1概述
控制的核心和本质是构建一个相当精确的系统模型,基于闭环的结构,在理想的环境中,找到使其稳定的方式。从实际应用的观点出发,控制的核心应该是找到抗扰机制,对过程或系统中存在的干扰与不确定性进行抑制。尽管PID控制技术应用范围广泛,控制效果较好,然而随着控制系统越来越复杂,PID的局限性越发明显,其鲁棒性较差,容易出现饱和。各种改进的PID算法也不同程度地遇到了瓶颈。在实际的生产过程中,存在的扰动通常不止一种或几种,而且控制对象的精确模型难以获得。在这样复杂的条件下,实现对系统的稳定控制,实现对扰动的抑制,需要寻求更优秀的控制方法。
基于这样的认识,自20世纪80年代末开始,我国韩京清研究员相继开发出非线性跟踪微分器,扩张状态观测器等对信号处理及控制具有独特功能和效率的新型非线性结构,从而开发出一系列新型非线性实用控制器。其中,自抗扰控制器(ADRC)最具代表性,因而统称为“自抗扰控制技术”。自抗扰控制技术是深入认识经典调节理论与现代控制理论各自优缺点,大量运用计算机仿真实验探索和改进而发展出来的。
1.1 自抗扰控制器的组成
经典自抗扰控制器由TD跟踪微分器(Tracking Differentiator),NLSEF非线性状态误差反馈控制律(Nonlinear State Error Feedback),ESO扩展状态观测器(Extended State Observer)三个部分组成。
1.2 安排过渡过程与跟踪微分器(TD)
事先安排过渡可以使误差反馈增益和误差微分反馈增益的选取范围扩大,从而使其整定更容易;可以让给定的反馈增益所能适应的对象参数范围扩大,让控制器的鲁棒性更好。
直接以e=v-y的方式产生原始误差并不合理。然而PID控制的优点是基于误差反馈来消除误差。初始时刻y=0,产生的误差很大,尤其容易让系统产生超调。安排过渡过程可以有效解决超调和快速性矛盾。
安排过渡过程使误差反馈增益和误差微分反馈增益的选取范围扩大,从而参数整定更为方便。它们能适应对象参数范围扩大,即控制器的鲁棒性更强。
1.3 非线性误差反馈控制率
引入控制作用的动力学系统成为受控系统。反馈机制是经典动力学系统中没有,而系统固有的机制,反馈机制的引入能使系统的性能在很大程度上到达人们理想的状态。反馈的机制能让线性系统变为非线性系统,反之很多情况下也能使非线性系统成为线性受控系统。这就使得非线性和线性之间的关系变得模糊。被控系统中的反馈机制,拥有抑制扰动的能力。但是不同形式的反馈抑制扰动的能力有很大差异。
由于TD微分器和安排过渡过程的运用,能够产生过渡过程的误差信号。利用该误差信号 和誤差微分信号,可以生成误差积分信号,进而实现PID控制。但是这种PID组合并不好。然而非线性组合的效果更好。而由于扰动能够得到估计和补偿,所以误差积分信号可以不用。原系统就可以化为线性积分器串联型系统,设计可以用一般的误差反馈来实现,让闭环系统得到理想的性能。
1.4 扩展状态观测器
系统在运行过程中一直在与环境进行信息交流,系统把某些部分状态变量信息传给外部,从系统外部得到某些信息,就是外部和系统是信息交换的过程中发展。人们只能收集系统外部变量来把握系统的运行状态。根据测量到的系统输入(控制量)。状态观测器就是系统的输出可以确定系统内部状态信息的装置。
扩展状态观测器的基本思想:把总扰动扩张成为一个新的状态变量,然后利用系统的输入,输出重构出包含系统原有的状态变量与扰动的所有状态[1]。
2四旋翼飞行器的自抗扰控制研究
对四旋翼飞行器自抗扰控制器(ADRC)进行建模,其中包括跟踪微分器、非线性误差反馈控制律、三阶扩展状态观测器。因为四旋翼飞行器是一个欠驱动、强耦合、非线性的动力学系统。所以在姿态控制通道、俯仰通道、横滚通道、偏航通道,它们相互耦合。所以对通道解耦在设计控制器时是一个不可忽视的问题,下文将对其系统进行解耦,最后对控制器进行matlab仿真实验,分析各通道自抗扰控制器的控制性能。
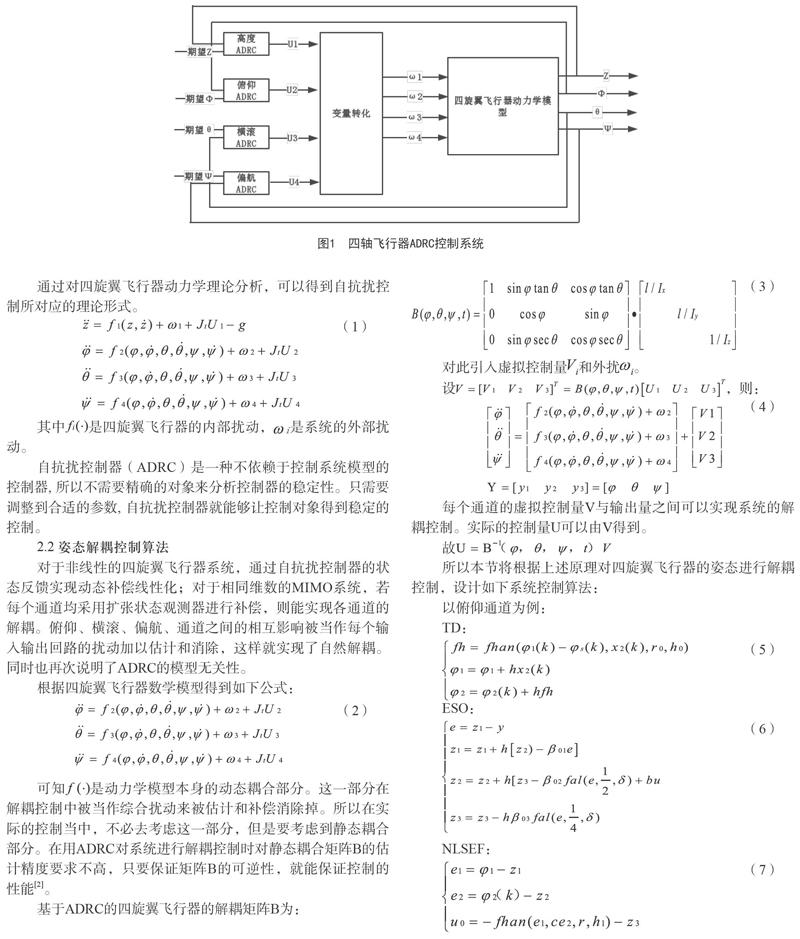
2.1 四轴飞行器ADRC控制系统设计
基于ADRC控制的四旋翼飞行器系统设计方案如下图, 分为4个独立的回路:高度控制通道、俯仰控制通道、横滚控制通道和偏航控制通道,将自抗扰控制器(ADRC)分别针对每个通道进行设计。
通过对四旋翼飞行器动力学理论分析,可以得到自抗扰控制所对应的理论形式。
其中是四旋翼飞行器的内部扰动,是系统的外部扰动。
自抗扰控制器(ADRC)是一种不依赖于控制系统模型的控制器, 所以不需要精确的对象来分析控制器的稳定性。只需要调整到合适的参数, 自抗扰控制器就能够让控制对象得到稳定的控制。
2.2 姿态解耦控制算法
对于非线性的四旋翼飞行器系统,通过自抗扰控制器的状态反馈实现动态补偿线性化;对于相同维数的MIMO系统,若每个通道均采用扩张状态观测器进行补偿,则能实现各通道的解耦。俯仰、横滚、偏航、通道之间的相互影响被当作每个输入输出回路的扰动加以估计和消除,这样就实现了自然解耦。同时也再次说明了ADRC的模型无关性。
根据四旋翼飞行器数学模型得到如下公式:
可知是动力学模型本身的动态耦合部分。这一部分在解耦控制中被当作综合扰动来被估计和补偿消除掉。所以在实际的控制当中,不必去考虑这一部分,但是要考虑到静态耦合部分。在用ADRC对系统进行解耦控制时对静态耦合矩阵B的估计精度要求不高,只要保证矩阵B的可逆性,就能保证控制的性能[2]。
基于ADRC的四旋翼飞行器的解耦矩阵B为:
对此引入虚拟控制量和外扰。
每个通道的虚拟控制量V与输出量之间可以实现系统的解耦控制。实际的控制量U可以由V得到。
2.3 控制器参数整定
自抗扰控制器的跟踪微分器、非线性反馈控制律、扩展状态观测器三个重要的环节,它们的参数都需要进行整定,并且很多参数之间相互联系,为确定各组成部分的参数,可以分别对这部分进行参数整定。先对TD进行参数设定,然后依次对 ESO 和NLSEF 进行参数设定。由于参数整定的关键是正确理解各个参数的物理意义,因此,韩教授以fhan函数为非线性组合函数的ADRC算法中需要整定的参数进行了说明。他提出,三个参数c,h1,b0与PID的三个增益类似,1/h1相当于PID的比例增益,阻尼因子c相当于PID的微分增益;补偿因子b0相当于控制量增益,类似于PID积分增益。
把保证闭环性能的PID参数的依赖关系比作漏斗效应,则闭环性能对ADRC参数的依赖关系比作盆地效应,保证闭环性能的自抗扰控制器参数适应范围大,同时在很多大范围内参数变化对自抗扰控制器的性能影响不大,需要注意的是应尽可能地将参数调到盆地中间位置[3]。
3系统仿真结果
上文进行了四旋翼飞行器的原理分析,针对这样一个非线性二阶系统设计了自抗扰解耦控制器,本节将在simulink平台上搭建仿真模型,对其的各项性能进行仿真实验和结果分析。
3.1 稳定性仿真
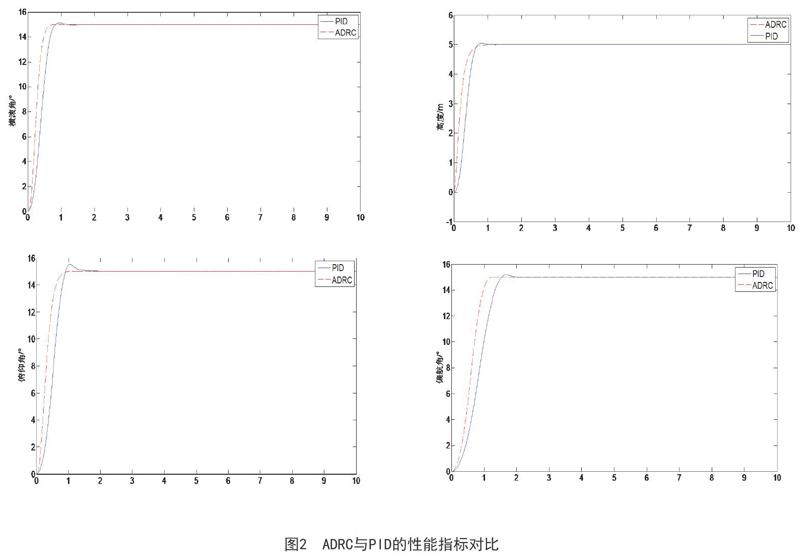
首先将对基于自抗扰控制的四旋翼飞行器进行稳定性实验和分析,设定各通道初始值为0,高度期望值设为5m,俯仰角、横滚角、偏航角的期望值为15° ,控制的目的是使四旋翼飞行器实现各种姿态稳定。仿真结果如下:
与PID控制器性能对比:
3.2 抗扰性仿真
抗扰性指的是系统对于外界的干扰所受影响的程度。在实际的四旋翼飞行系统中会受到外界各种情况的干扰,在稳定性试验基础下进行如下仿真实验,统一在3s时刻加入噪声信号(模拟)作为外界干扰,测试个通道控制器的抗扰性能[4]。仿真结果如下:
从以上实验可以看出对于外部的扰动,各通道都能在自抗扰控制器控制下1秒内恢复稳定状态,抗扰性较为优异。因为ESO扩展状态观测器能够快速的估计扰动,并对控制系统进行补偿,达到消除扰动的效果。扩展状态观测器估计出系统的总扰动实施作用量,可以对系统进行补偿,从而很好的抑制外部干扰[5]。
3.3 鲁棒性仿真
鲁棒性指的是系统对于自身内部的改变所受影响的程度。在现实中四旋翼飞行器的系统系统性能和参数的变化通常都是无法规避的。鲁棒性主要体现的是当模型参数发生较大改变时,控制器能否继续保持良好的控制性能。因此,在稳定性实验基础上,对控制器进行鲁棒性的检验。分别对四旋翼飞行器的参数(各坐标轴转动惯量和机体质量等参数)增大和减小30%,对各通道进行原系统对比实验[6],为方便观察,原系统延迟0.2s,结果如下:
从上面的仿真图和性能指标可以看出,在原系统ADRC控制器参数没有改变的情况下,增大或减小30%系统参数后,除横滚通道发生一定偏移外,其他通道几乎与原系统重合,性能参数没有太大的变化。经过分析和探究,横滚通道控制器的参数需要继续优化,可以保证控制的性能。这说明了自抗扰控制器有较强的鲁棒性。也说明了自抗扰控制器对控制对象精度没有很高的要求。
通过仿真实验验证将自抗扰控制技术应用于四旋翼飞行器控制系统有着良好的效果,可以实现姿态和高度的稳定控制,ADRC具有超调量小,调节时间短,抗扰性和鲁棒性强的优点[7]。
4结束语
根据对四旋翼自抗扰控制系统的稳定性实验,抗扰性实验,和鲁棒性实验,表明自抗扰控制器不仅能够有效估计系统内外扰动并补偿消除其影响,实现对四旋翼稳定的控制。还有较强的鲁棒性。相比经典PID控制的性能有了显著的提升,可以很好地满足四旋翼飞行器对控制器性能的要求。实验中的难点主要在于非线性自抗扰控制器的参数过于繁多,而且目前学术界还没有形成完备的整定方法,参数调节主要依赖于试凑法,整定过程复杂,工作量过大。在以后的研究试验当中可以考虑使用线性自抗扰控制技术,减少参数的数目,但依然可以保留经典自抗扰控制器的优点。
从本文的研究实验可以清楚地看出自抗扰控制器具有优秀的主动抗扰能力,在四旋翼飞行器飞行控制上所体现的优越性。继续优化自抗扰控制器,将在工程系统控制中获得更优秀的控制性能。
参考文献
[1] 周权,黄向华,朱理化.四旋翼微型飞行平台姿态稳定控制试验研究[J].传感器与微系统,2009(5):72-74.
[2] 周宣征,张宝国.自抗扰控制器的参数整定研究[J].电气自动化,2014(2):23-24.
[3] 张广昱,袁昌盛.基于自抗扰理论的小型四旋翼飞行器姿态控制[J].航空工程进展,2014(3):338-342.
[4] 王辰昱.自抗擾控制器的参数整定及应用[D].北京:华北电力大学,2010.
[5] 高志强.自抗扰控制思想探究[J].控制理论与应用,2013(12):1498-1510.
[6] 孟凡东.自抗扰控制器的设计与应用研究[D].哈尔滨:哈尔滨理工大学,2009.
[7] 陈增强,李毅,袁著祉,等.串级自抗扰控制器在纵列式双旋翼直升机飞行姿态控制中的应用[J].控制理论与应用,2015(9):1219-1225.
作者简介
李定聪(1995-),男,云南曲靖人;毕业院校:中北大学,专业:自动化,学历:本科,现就职单位:绵阳市维博电子有限责任公司,研究方向:智能测控。
庞中秋(1990-),男,河北沧州人;毕业院校:广西师范大学 专业:微电子,学历:硕士,现就职单位:绵阳市维博电子有限责任公司,研究方向:智能传感。
