基于SIFT-SRBICP算法特征点云提取与配准研究
2020-11-24李陆君党淑雯王庆渠
李陆君 党淑雯 王庆渠
(上海工程技术大学航空运输学院,上海 201620)
引言
点集配准是模式识别和图像处理中的一个关键问题,其目的是建立两个点集之间的相关性,通过求解其最优空间变换来达到最佳配准的目的。目前,点集配准已经在3D重建[1]、图像拼接和分割[2-3]、目标识别[4]等领域得到了广泛的应用。
目前,应用最为广泛的点集配准算法是由 P.J.Besl等人提出来的迭代最近点(Iterative Closest Point,ICP)算法[5],该算法对重合率较高的点集具有较好的配准效果。针对重合率较低的点集配准问题,很多学者[6-8]也提出了不少改进的点集配准算法[9],但以上研究均未考虑点集配准中的尺度问题。
S.Du等人[10]提出了一种有效的尺度迭代最近点(Scaling Iterative Closest Point,SICP)算法,该算法引入有界尺度的概念,从而解决了m维点集的尺度配准问题。L.Zhao等人[11]解决了 ICP 算法中的全局优化问题,大大提高了大尺度点集的配准精度。李清平[12]提出了一种针对多源运动图像的跨尺度配准方法,该方法采用 LTP 算子描述 SIFT特征点[13],保持了特征对图像旋转、尺度、亮度等变化的稳定性和高效性,大大提高了特征点的匹配效率,但以上这些尺度配准算法均未考虑由旋转角的变化而引起的配准失败问题。
因此为了进一步提高尺度配准的精度,本文提出了基于旋转角约束和引入高斯概率模型的尺度迭代最近点算法,即SRBICP算法,主要解决尺度配准中由旋转角的变化以及外界噪声引起的配准失败的问题。新方法通过在 ICP 算法中引入有界尺度,为旋转角设置了边界约束,同时,引入高斯概率模型来去除噪声影响。

图1 SIFT算法流程图

图2 深度图像和彩色图像
1 基于SIFT算法提取特征点云
尺度不变特征转换即SIFT(Scale-invariant feature transform)是一种用来侦测与描述影像中的局部性特征,在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量的计算机视觉算法。该算法提取图像特征点流程如图1所示。
基于SIFT算法具有良好的尺度和旋转不变性,提取的特征点效率高和稳定性强的特点考虑,本文采用SIFT算法,使用基于ROS系统搭载Kinect相机的智能小车获得图像数据,对图像特征点进行提取,采集图像如图2所示。
假设采集得到的图像数据即为点云集:X={x1,…,xn},每一个点数据由六个分量组成,其中,r,g,b表示颜色信息,x,y,z表示空间位置,并通过针孔相机模型(如图3)将点云世界坐标系转化为归一化的平面坐标系。

图3 针孔相机模型示意图
从而,空间点坐标[x,y,z]可转化为像素坐标[u,v,d](d指深度),如下方法:
(2-1)
(2-2)
d=z·s
(2-3)
其中,fx和fy指相机在x,y两个轴上的焦距,cx和cy指相机的光圈中心,s指深度图的缩放因子。相机的内参矩阵C定义为:
其中倾斜参数β默认为0。
则每个点的空间位置与像素坐标可描述为:

(2-4)
其中,R和t是相机的姿态,R代表旋转矩阵,t代表位移矢量。在假设相机没有旋转和平移的条件下,仅考虑单幅点云的情况下,可将R设成单位矩阵I,t设成0。s是深度图的数据与实际距离的比例,设为1000。
2 基于改进SRBICP算法的特征点云配准
ICP算法又名迭代就近点算法, 该算法是以点集对点集(PSTPS)配准方法为基础,基于四元数的点集到点集配准,从测量点集中确定其对应的就近点点集,计算新的就近点点集,然后进行迭代计算,直到残差平方和所构成的目标函数值不变,结束迭代过程。
假定模型集合M={mi}和数据集合D={dj},i=1, 2,…,Nm,j=1, 2,…,Nd,Nm和Nd分别表示点集M和D的大小。
经典ICP算法分为两步骤实现,其步骤可总结如下:
1)首先建立点集的相关性:
(3-1)
式中,i=1, 2,…,Nd。
2)然后计算点集M和D的新的旋转和平移变换:
(3-2)
并更新旋转变换Rk+1和平移变换tk+1:
Rk+1=R*Rk
(3-3)
tk+1=R*tk+t*
(3-4)
重复以上两个步骤,直到满足精度要求,终止迭代,输出最优(R,t),其中,R为旋转矩阵,t为平移矢量。
ICP算法是一种精确度较高的点云配准算法,但它未考虑尺度因素,旋转角变化大和外界噪声对配准精度的影响,在实际情况下,既有尺度变换又有刚度变换,而且还伴随着噪声影响的情况,基于此,本文提出一种改进型SRBICP算法,通过引入尺度矩阵边界[14]、旋转角约束矩阵[15],并进一步引入退火系数降低外界噪声的影响,同时,采用动态迭代系数来提高配准速度,从而来提高点云匹配的精确度。
SRBICP算法其步骤可总结如下:
首先,引入带有边界的尺度矩阵S,令S=diag(s1s2…,sm),计算新的变换(Sk+1,Rk+1,tk+1):
(3-5)
判断条件ΔS=|Sk+1-Sk|小于阈值ε或者达到最大迭代次数Stepmax,则停止该迭代过程。
其中S是尺度矩阵,R代表旋转矩阵,t代表位移矢量。然后,加入旋转角约束矩阵R,退火系数λ和动态迭代系数h,具体实现步骤如下:

2)估计旋转角θx,θy,θz的边界,即θx∈[θxb-Δθx,θxb+Δθx],θy∈[θyb-Δθy,θyb+Δθy]和θz∈[θzb-Δθz,θzb+Δθz];
3)利用s.t.RTR=Im,det(R)=1,建立点集M和D的相关性,k=k+1,ck(i),i=1.2,…,Nd;
4)利用奇异值分解的方法计算旋转矩阵Rk+1和平移矢量tk+1,则
(3-6)
计算qk+1的相邻两次迭代的变化量Δqk+1,并计算Mk+1=Rk+1M+tk+1值;
5)判断动态迭代系数h,若h>0,则
(3-7)
计算新的变换(Sk+1,Rk+1,tk+1)并执行Δqk=(Sk+1,Rk+1,tk+1)共h次来进一步更新迭代,即用Δqk更新(Sk+1,Rk+1,tk+1)共计h次,并通过执行Mk+1=Δqk+1(Mk+1)共h次来更新Mk+1;
6)对于均方根误差,判断其变化量的绝对值,如果|RMSk+1-RMSk|>ε′,则令h=h+1,否则令h=0,RMS定义如下:
(3-8)
(3-9)
并计算点集方差,更新高斯概率方差,高斯概率方差的更新公式为:
(3-10)
7)判断算法的终止条件,若均方根误差变化量的绝对值满足|RMSk+1-RMSk|<ε或者k>Stepmax,算法则停止迭代,否则令k=k+1并转到(3)这里的ε′,ε和Stepmax是预先设置的阈值。
本文提出的改进型SRBICP算法,解决了在实际情况下尺度匹配不准确,旋转角变化过大引起的配准效果不佳的问题,实现了既有尺度变换又有刚度变换的情况下精确匹配,克服了旋转角过大引起的配准误差偏大问题,有效提高了算法的收敛速度和匹配的准确度。
3 实验验证及其分析
为验证改进型SRBICP算法的有效性,本文采用基于Linux系统所搭载的ubuntu14.04平台进行点云匹配仿真实验。
该实验采用SIFT点云提取算法,使用基于ROS系统搭载Kinect相机的智能小车获得图像数据,进行特征点提取,为了达到可视化的效果,本文在特征点提取图像上给出了特征点的半径、角度等参数,得出实验对比如图4所示。
通过特征点检测结果对比,相较FAST算法和ORB算法,基于SIFT特征提取算法的有效特征点平均数目多,运行迭代时间缩短,表现出较好的稳定性和高效性,见表1所示。
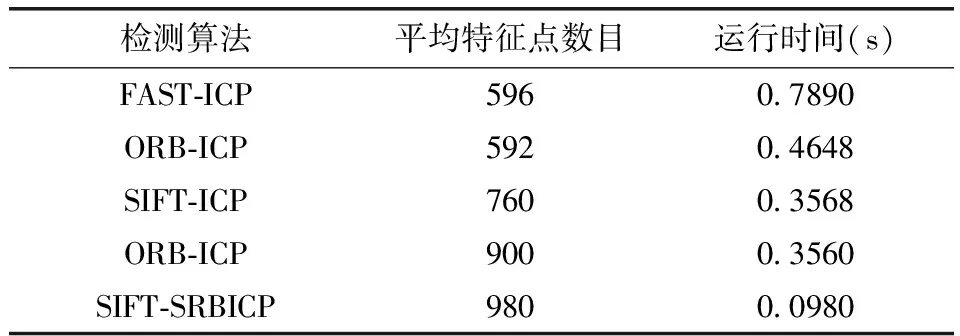
表1 特征点检测结果对比
从不同点云配准算法结果比较来看,改进型的SRBICP算法与经典ICP算法和SICP算法相比,改进型的SRBICP算法的迭代次数和运算成本有了明显的降低,且配准精度得到较大提高,从而验证了改进型SRBICP算法的有效性和优越性。实验表明,相较经典ICP算法,运行时间节约了近40%,相较SICP算法节约近30%,配准误差减少约4%,见表2所示。

表2 不同点云配准算法结果比较

图4 特征点检测实验对比图
为了更加直观地看出不同点云配准算法匹配的效果,本文将数据进行标准化处理,生成三维折线图,得出不同算法的匹配点数,迭代次数和耗时,配准误差对点云配准的关系,SRBICP算法在特征点匹配数目高于其他两种算法,在迭代次数,耗时,配准误差方面都有所降低,如图5所示。

图5 不同点云拼接算法结果比较

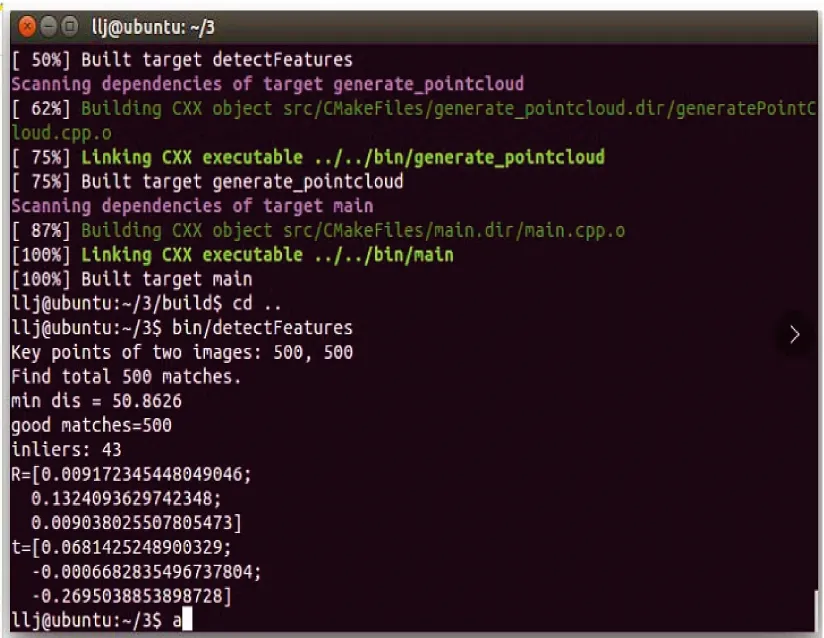
图6 ICP算法匹配

图7 SICP算法匹配

图8 改进型的SRBICP算法匹配
从图6和图7的配准结果来看,传统的ICP算法匹配的特征点混乱无章,而改进型的SRBICP算法匹配特征点清晰可见。传统ICP匹配点对数为500,改进后匹配点对数为125,相比传统ICP算法,降低了由于尺度问题和旋转角过大引起的配准误差,提高了配准精度。从图7和图8的配准结果来看,改进型的SRBICP匹配点对数62,去除外界噪声的影响,特征点匹配精度有了明显的改善,配准精度得到提高。从图6和图8的配准结果来看,改进型的SRBICP算法相比经典ICP算法,凸显出匹配精度高,匹配效果好,抗干扰能力强,匹配速度快的优点。
4 结论
本文引入了改进后的SIFT-SRBICP算法,对点云进行提取和匹配,主要从尺度因素,旋转角因素,噪声因素对点云配准的影响进行评估,结合实际采集图像数据进行仿真实验,得出以下结论:
1)在改进SIFT-SRBICP算法,相比较经典SIFT-ICP算法,在特征点提取方面和点云配准方面,具有效率高、准确度高、时间短和高稳定性的特点;
2)在改进的SRBICP算法,在点云配准方面,配准精度提高了约50%,同时配准速度提高了约40%,实现了既有尺度变换又有刚度变换的情况下精确匹配,克服了旋转角过大引起的配准误差偏大问题,进一步提高点云配准的精度,速度,鲁棒性和抗躁性,具有更高的可靠性和稳定性。
