基于模糊PID下肢外骨骼机器人的控制技术
2020-11-23吴青鸿李健刘欢杨小龙丛佩超葛动元
吴青鸿 李健 刘欢 杨小龙 丛佩超 葛动元

摘 要:为研究下肢外骨骼机器人控制技术对轨迹跟踪的影响规律,首先对下肢外骨骼机器人进行结构设计,基于MSC.ADAMS软件建立了外骨骼机器人模型;借助模糊PID控制方法研究下肢外骨骼控制方法,分别研究了传统PID与模糊PID控制技术对外骨骼控制的影响规律;利用MATLAB与MSC.ADAMS实现了对外骨骼运动控制的联合仿真,并对比了输入步态曲线和实际跟踪曲线.研究表明:在相同条件下,模糊PID的控制算法相较于传统PID控制算法能够更快速和准确地跟踪步态曲线,并且能够更好地克服外部扰动.
关键词:下肢外骨骼机器人;PID控制;模糊PID控制;联合仿真
中图分类号:TP273.4;R496 DOI:10.16375/j.cnki.cn45-1395/t.2020.04.014
0 引言
随着我国人口老龄化趋势不断加剧,以及日常生活和交通造成的意外事故,导致下肢运动功能障碍人数不断增加.经过临床试验证明,通过对下肢外骨骼进行运动康复训练,能够很好地提高因中枢神经系统疾病以及意外事故引起的下肢运动功能受损患者的康复效果,使他们早日回归正常生活[1].因此,通过机器人辅助康复训练具有广阔的应用前景,有望成为一种常规的康复训练方式.
近10年来,国内外涌现出了较多的下肢康复机器人,以帮助病人进行下肢的康复训练.瑞士 Hocoma公司的Lokomat[2]康复机器人使用轨迹跟踪的控制方式,预设下肢各关节的步态运动轨迹曲线,从而模拟人体步态.日本Tsukuba大学研制的HAL[3]通过布置在下肢活动肌肉的表面肌电传感器(sEMG)来控制下肢,使其根据设定的角度和速度控制行走;哈尔滨工程大学研制了非对称式刚柔混联康复机器人[4];太原理工大学张政等[5]根据传统PID算法,设计了bangbang-PD轨迹跟踪算法.这些康复机器人大多采用传统PID控制,取得了一些成果,但难以解决在康复过程中步态曲线多变和易受到干扰的问题.
为提高步态轨迹跟踪的准确性和抗干扰能力,根据下肢外骨骼负载具有多变性的特点,本文设计了模糊PID控制器.为验证模糊PID算法对外骨骼轨迹跟踪的控制效果,在MATLAB中分别建立PID和模糊PID的控制框图,在MSC.ADAMS中搭建下肢外骨骼的结构模型;通过联合仿真,研究了传统PID和模糊PID控制算法在无外扰和有外扰的情况下对步态曲线的跟踪情况,对比两种算法的步态跟踪效果,为下肢外骨骼控制算法的研究提供参考.
1 下肢外骨骼机器人结构设计
康复治疗早期,患者下肢力量不足以完全支撑自身重量[6],所以需要对患者进行减重辅助.前期已开展了移动式减重平台的研制,其结构设计图及样机试用如图1所示.该设备具有移动、减重、原地转向等功能,但由于早期患者肌肉力量不足,无法自主实现“迈腿”动作,需要借助外骨骼等装备辅助其开展康复训练. 为此,本文在原有移动式减重平台的基础上,设计了具有主被动训练功能的下肢外骨骼康复训练机器人.
下肢外骨骼机构的运动范围需要与人体下肢的步态相协调.根据人体运动特点,髋关节和膝关节是行走的主要驱动关节,所以两个关节在人体矢状面内的自由度由电机提供驱动力矩,带动下肢进行屈伸,踝关节活动范围较小,但偏瘫患者容易出现外翻和内勾的情况,为此在踝关节处设置脚掌矫正机构.下肢外骨骼机器人结构示意图如图2所示,图2(a)为设计的下肢外骨骼结构图,材料选用304不锈钢.为满足不同身材的患者使用,依据《GB-10000-88中国成年人人体尺寸》确定结构参数,能够满足155~185 cm身高的患者使用.下肢外骨骼在髋关节处设置有两自由度调节机构,能够适应不同患者骨盆的高度和宽度.髋关节与调节机构连接处,如图2(b)所示设置有重力平衡机构,通过弹簧片弹力平衡外骨骼重力,减少对穿戴者的负担,并且保证在人体矢状面关节能够跟随重心上下波动.大腿设计为两段式,下端连接板上设置有滑槽,调节手柄与上端连接板固定,其活动轴穿过下端连接板的滑槽,可自由调节大腿至适当长度,通过手柄锁紧两块连接板.在小腿处设置有脚掌牵引弹簧,可以与定制的鞋子上的挂钩连接,通过调节弹簧长度和预紧力使患者脚掌处于正常姿态.下肢外骨骼机器人与患者通过腰部绑带、大腿绑腿、小腿绑腿固定,并在绑腿内部安装有气囊,保证固定稳固的同时增加舒适度.机器人整体结构如图2(c)所示,外骨骼通过调节机构与移动式减重平台固定在一起.
2 控制器设计
2.1 模糊PID控制算法
下肢外骨骼髋关节和膝关节由超扁平谐波关节执行器(MHUA070E-101B)进行驱动,进而带动人体下肢运动进行康复训练.由于外骨骼是一个复杂的非线性系统,难以通过建立机器人动力学模型开展理论分析与精确控制,为此,借助模糊PID控制方法进行研究.模糊PID基于PID算法,首先获取输入变量与参考值的误差e和误差变化率ec;再根据实际调整PID控制器参数经验建立的模糊规则库对输出变量进行模糊推理;最后对输出变量的推理结果解模糊得出PID参数的增量,完成对PID参数的自整定.
模糊算法的控制器结构由模糊化、模糊推理机、精确化3个主要部分和知识库组成[7],控制算法原理如图3所示.将采集到的正常步态关节角度曲线作为输入与外骨骼输出的实际角度曲线进行比较,获得系统误差e和误差变化量ec,将其作为控制器的输入,根据制定的模糊规则进行推理计算,得出PID参数的修正量[ΔKp] ,[ΔKi],[ΔKd],将修正量输出作为PID控制器[Kp],[Ki],[Kd]的增量,进行参数的自整定,从而保证在步态曲线的跟踪误差变化较大或受到外部扰动时能够有较好的控制参数.下肢外骨骼的人机交互力有很大的不确定性,但总体是在一定范围内变化,通过模糊算法不断修正PID参数能够达到更好的控制效果.由于每一个采样周期均需根据误差情况进行模糊推理,并对PID控制器的参数进行调整,所以对控制器的计算速度有较高的要求.外骨骼控制芯片采用Xilinx公司的现场可编程逻辑阵列(Field Programmable Gate Array,FPGA)進行控制算法的运算,以保证系统实时性,避免系统延迟引起的不稳定性.
2.2 确定隶属函数以及输入量的模糊化
隶属度函数一般有梯形、三角形、钟形.因为三角形函数地形状只和直线的斜率有关[9-10],由于下肢外骨骼需要准确地调整控制器参数,防止调整参数与系统不匹配,造成系统不稳定,对系统灵敏度要求较高,所以均选择三角形函数.图4是误差e的隶属度函数,其论域均取[-3,3].将采集的误差进行量化,使量化值与论域对应,采用量化因子进行处理.
根据论域取值,得到模糊论域离散化数n,采集的误差变化范围[-x,x]为基本论域,则量化因子k=n/x.当进行外骨骼控制器参数调整时,若误差的变化范围有变化,只需对量化因子进行调整.采用同样的方法,可对输出量进行量化,髋关节和膝关节可使用同一个模糊控制器.
记参考曲线角度为[θ0(t)],当前实际曲线角度为[θ(t)],[Δt]为采样时间间隔,误差和误差变化率分别由 式(2)、式(3)计算可得:
在模糊规则中,将误差e及误差的变化率[ec]的模糊量值根据其影响程度定义为{NB, NM, NS, ZO, PS, PM, PB},分别表示:“负大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”.根据式(2)计算出t时刻的误差值,对应隶属函数,可将输入量转化为模糊变量.如当e取值为-3时,e完全隶属于NB;当e取值为-2时,e完全隶属于NM;当e取值为-2.5时,e隶属于NB的值为0.5,隶属于NM的值为0.5;即e值越小,则隶属于该模糊变量的隶属度越大.
2.3 建立模糊规则
模糊算法的核心为制定合适的推理规则.结合专家知识和调整外骨骼PID控制参数经验建立模糊规则表,如表1所示,以第一行第一列的数据为例:当输入隶属度函数误差e和误差变化ec均取负大值NB,隶属度为1时,则输出隶属度函数[ΔKp]取正大值PB,[ΔKi]取负大值NB,[ΔKd]取正小值PS,即当实际角度落后于期望角度较大值时,需要迅速增大[Kp],增加系统的响应速度,[ΔKp]取PB;由于[Ki]较大会造成系统超调,应迅速减小[Ki]值,[ΔKi]取NB;误差变化率ec值较大系统会有较大的滞后,而[Kd]值可以克服系统的滞后,应增大[Kd]值;调节参数[Kp]的取值较大,为提高系统稳定性,[ΔKd]取PS.其他各项参数根据实际PID调节过程中参数变化情况确定.
2.4 解模糊
经过模糊规则推理后,输出的值为模糊量,还必须去模糊化,通过解模糊计算,将模糊量转化为精确量.MATLAB中有5种解模糊的计算法:包括面积重心法、面积等分法、平均最大隶属度法、最大隶属度取小法及最大隶属度取大法[11-12].解模糊方法的选取与推理方法和隶属度函数的选取有关.由于所得的模糊量集合是多个精确量的集合,故采用面积重心法进行解模糊.其表达式为:
3 仿真实验
为验证模糊PID控制器的有效性,利用MATLAB和MSC.ADAMS进行联合仿真.MSC.ADAMS中可搭建下肢外骨骼的虚拟样机,如图5所示,在髋关节和膝关节处根据电机质量,设置相应的载荷,并设置相关的材料参数和约束,将关节力矩定义为虚拟样机的输入量,关节运动角度定义为输出量.
为获取人体行走步态数据作为参考曲线,通过RealGait德长全身三维步态与运动分析系统采集人体行走时髋关节、膝关节的步态数据,如图6所示.测试者在全身躯干和四肢佩戴步态分析系统的传感器,记录其身体肢体关节的角度数据,取髋、膝关节在人体矢状面角度随时间变化的曲线,即两个关节的屈伸角度曲线,步态数据如图7所示.将采集到的数据作为控制器的参考轨迹输入,通过仿真对比输出的跟踪轨迹情况,研究传统PID与模糊PID算法的跟踪效果.
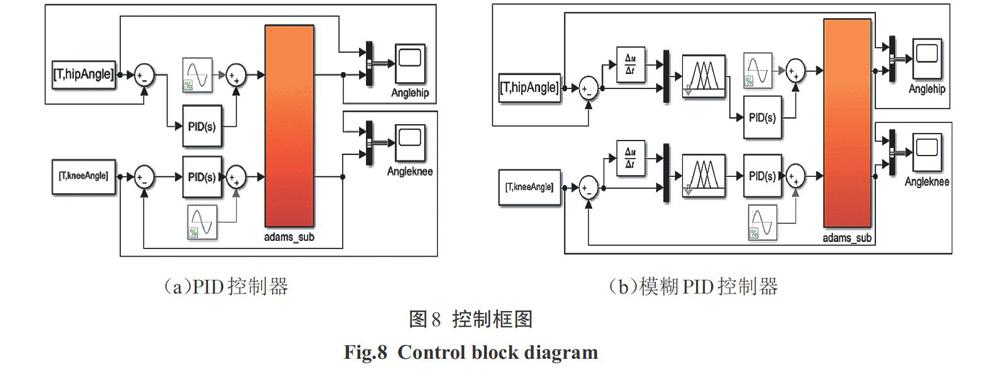
下肢外骨骼的结构具有非线性和多变量耦合的特点.传统PID控制器结构简单、使用方便,但只能对误差经过固定的比例、微分、积分增益调节使运动轨迹尽可能地贴合参考曲线,在下肢外骨骼机器人的非线性系统中极易因为响应速度不够或难以达到稳态而引起超调.为此,引入模糊推理模块,可以分析跟踪轨迹的误差大小及误差的变化率制定相应的推理规则,实时调节PID模块中比例、微分、积分环节的值,以适应非线性系统复杂多变的特性.PID控制器的控制框图如图8(a)所示,髋、膝关节的角度曲线数据作为系统的参考数据输入,将关节的实际角度与参考角度作差,其差值即为误差值;误差值在PID模块中经过比例、积分、微分环节的处理得到髋、膝关节的驱动力矩并输入到MSC.ADAMS中,其中PID控制器的控制参数通过试凑法确定,髋关节控制参数为: [Kp]=150,[Ki]=1 500,[Kd]=60,膝关节控制参数为:[Kp]=80,[Ki]=20,[Kd]=5.图8(b)为模糊PID控制框图,把跟蹤误差和对跟踪误差求导后的值输入建立的模糊推理模块,得到[ΔKp] ,[ΔKi],[ΔKd]值,将其输入到PID模块中,完成对PID参数的实时整定.
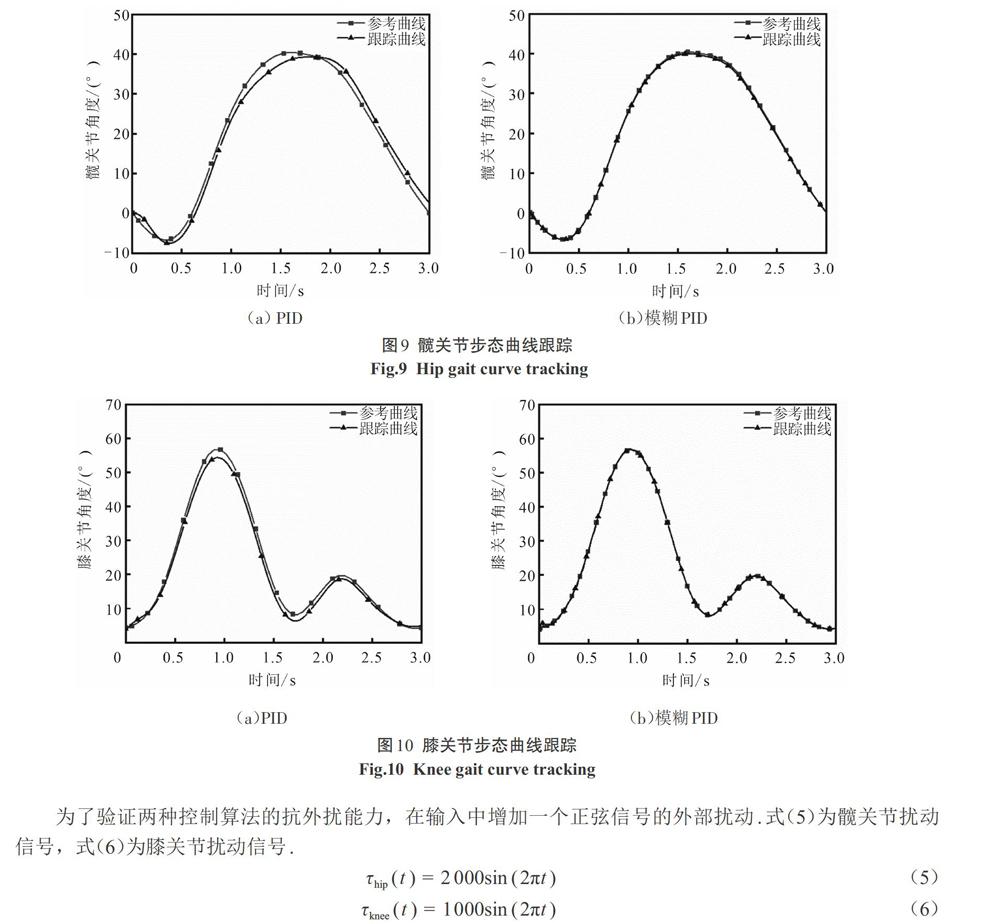
将输入的参考曲线和MCS.ADAMS软件输出的实际运动轨迹曲线进行对比,髋关节、膝关节步态曲线的跟踪效果分别如图9、图10所示.从图9(a)、图10(a)PID控制器对步态轨迹的跟踪可以看出,虽然通过PID算法能够实现对步态曲线的跟踪,但在曲线拐点位置,曲线不能完全贴合,步态跟踪不够准确.这是由于在拐点位置,参考曲线变化趋势突变,控制器难以及时响应,所以跟踪曲线在拐点处会落后于参考曲线,随后参考曲线的变化趋于稳定.从图9(b)、图10(b)模糊PID控制器对髋关节、膝关节步态轨迹的跟踪效果可知,使用模糊PID算法在外骨骼髋、膝关节步态曲线的拐点处均能够更好地贴合参考曲线.从膝关节跟踪曲线能够看到,即使初始阶段存在误差,模糊PID算法亦能够迅速地减小误差,最终完全和输入曲线贴合,并避免了PID控制算法在曲线拐点位置跟踪曲线出现超调的问题.仿真结果说明,模糊PID算法相较于传统PID算法能够更准确和迅速地跟踪人体步态曲线.
增加外扰后,基于传统PID及模糊PID控制器,其髋、膝关节轨迹跟踪的仿真结果分别如图11、 图12所示.从图11(a)、图12(a)中可以看到,传统PID控制器在外部扰动下,无论是髋关节还是膝关节,均难以实现对参考轨迹的有效跟踪,特别在曲线拐点处偏差较大.而从图11(b)、图12(b)中可以看到,基于模糊PID控制器,在相同的外部扰动下,虽然髋关节和膝关节的跟踪曲线与参考曲线出现了一些超调,但其偏差较小,依然能够对参考曲线进行很好地跟踪,说明模糊PID算法相较于传统PID算法对于外部扰动也有很好的自适应能力.对外部扰动的特点进行分析,由式(5)、式(6)可知,当外部扰动的周期为1 s,在曲线的波峰波谷时,PID控制器跟踪曲线出现较大抖动.这是因为PID参数固定,当外部扰动较大时,系统难以及时作出响应,而模糊PID能够根据跟踪轨迹的误差及误差的变化率对PID参数进行整定,从而即使外部存在扰动的干扰,依然能够对目标曲线进行准确跟踪.
4 结论
本文自行设计了下肢康复外骨骼机器人的结构和控制器,结合MATLAB和MSC.ADAMS完成了对外骨骼的联合仿真,通过对控制器的研究,获取了不同控制方法的步态跟踪曲线. 结果表明,传统PID无法实现精确的轨迹跟踪.因此,使用模糊PID方法,利用模糊推理逻辑对PID参数进行修正,完成了对步态轨迹的快速准确跟踪.具体结论如下:
1)结合移动式减重平台设计了一款下肢外骨骼康复机器人,患者可进行移动式康复训练,为下肢康复机器人的研究和设计提供参考.
2)通过联合仿真完成了外骨骼虚拟样机的建立和模糊PID控制器的设计,实现了结构模型和控制系统数据的闭环反馈,为研究复杂的结构和控制系统奠定了基础.
3)采用模糊PID控制算法能够避免传统PID算法参数固定的缺点,可更快速和准确地完成对步态曲线的跟踪,并且具有更好的抗外部干扰能力,对实现下肢外骨骼的被动控制具有指导意义.
参考文献
[1] YANG S Y,HAN J,XIA L,et al. An optimal fuzzy-theoretic setting of adaptive robust control design for a lower limb exoskeleton robot system[J]. Mechanical Systems and Signal Processing,2020,141:1-23.
[2] SHI D,ZHANG W X,ZHANG W,et al. A review on lower limb rehabilitation exoskeleton robots[J].Chinese Journal of Mechanical Engineering,2019,32(4):2-11.
[3] SANKAI Y. HAL:hybrid assistive limb based on cybernics[C]//Robotics Research.The 13th International Symposium,ISRR 2007,Hiroshima,Japan,November 26-29,2007.DBLP,2010.
[4] 尹鵬程. 非对称式刚柔混联下肢康复机器人及远程协作技术研究[D].哈尔滨:哈尔滨工程大学,2019.
[5] 张政,赵利平,梁义维. 基于差动轮系的下肢外骨骼轨迹跟踪控制方法的研究[J].煤炭技术,2015,34(4):305-307.
[6] 张燕,李梵茹,李威,等.基于人机耦合的下肢外骨骼动力学分析及仿真[J].应用数学和力学,2019,40(7):780-790.
[7] 李彩凤,杨风.下肢康复训练伺服系统建模与模糊自整定PID控制[J].现代电子技术,2018,41(19):129-132.
[8] 张蔚然,鲁守银,吴林彦,等.基于模糊补偿的主从式上肢外骨骼康复机器人训练控制方法[J].机器人,2019,41(1):104-111.
[9] 程思远,陈广锋.下肢康复外骨骼机器人模糊PID控制研究与仿真[J].测控技术,2019,38(12):22-28.
[10] 李红哲,赵冬冬.基于模糊PID的康复机器人减重系统控制研究[J].计量与测试技术,2019,46(3):52-55.
[11] 张宇豪,梁程华,孙子发,等.基于模糊算法3D打印喷头PID温度控制[J].广西科技大学学报,2019,30(4):70-76.
[12] 华磊,张成涛,陆文祺,等.模糊自适应PID控制在电阻炉温控中的应用仿真[J].广西科技大学学报,2018,29(1):37-42.
(责任编辑:黎 娅)
