混凝土预制构件线性振动台设计研究
2020-11-23曹国巍张声军陈炜宁石小虎
曹国巍,张声军,周 磊,陈炜宁,石小虎,魏 乾
(1.中国建筑科学研究院有限公司 建筑机械化研究分院,河北 廊坊 065000;2.北京建筑机械化研究院有限公司,北京 100007;3.廊坊凯博建设机械科技有限公司,河北 廊坊 065000)
近年来,建筑工业化在我国得到大力发展,振动台作为混凝土预制构件生产线关键设备,直接影响到混凝土构件的质量与生产效率。现有混凝土预制构件振动台一般采用安装多台振动器的方式进行振动,每台振动器所产生的振动覆盖一定范围,距离振动器近的位置振动强,距离振动器远的位置振动弱,导致整个台面振动分布不均;另外,由于多台振动器工作时不能保持同步,多台振动器之间存在振动能量内耗,噪音大,振动效率不高。
针对以上问题,本文设计了一种混凝土预制构件线性振动台,该振动台可进行水平面内XY方向上线性整体振动,保证了整个台面上的振动参数分布均相同,大大提高混凝土振动密实效率,并且无内耗,噪音低,由于其进行线性振动,尤其对于大型模台,无扭曲变形,提高了使用寿命,另外,该振动台可方便地进行频率、振幅等振动参数的调整,以适应不同构件的生产,使用范围广。
1 线性振动原理
根据现有混凝土预制构件生产线振动台的问题,提出水平面内XY方向上线性振动的方案。其基本原理如图1所示。
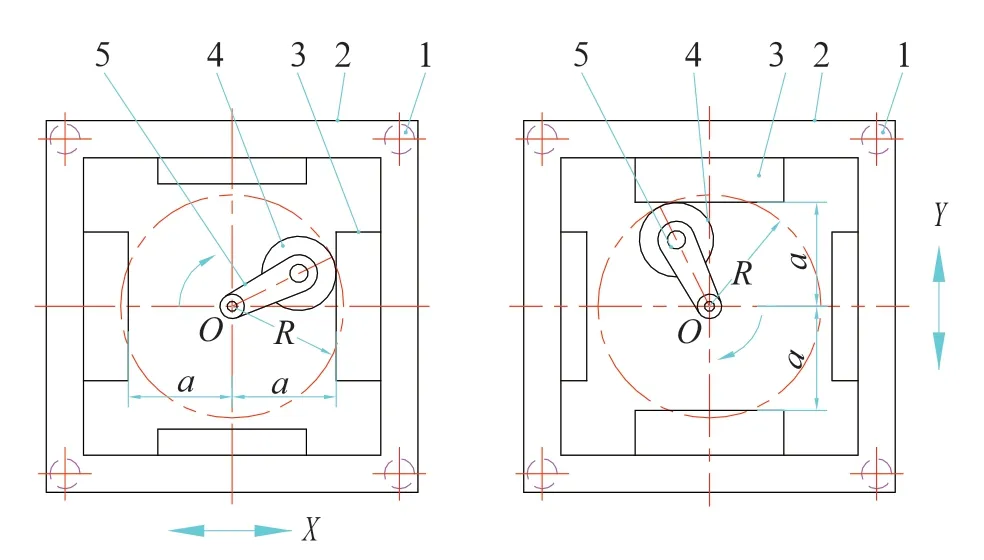
图1 线性振动方案示意图
底架底部安装支撑弹簧,支撑弹簧与地面固定,底架框架内部安装四组限位装置,限位装置与回转中心的距离可调,底架框架中间安装回转装置,回转装置外端带有滚轮。
当X方向两组限位装置与回转中心O之间的距离a小于回转装置运动半径R时,回转装置转动时,滚轮与X方向的2组限位装置接触,推动底架在X方向往复运动,产生X方向上的振动;滚轮与Y方向的2组限位装置接触,挤压限位装置,推动底架在Y方向往复运动,产生Y方向上的振动。调整回转装置转速,可改变振动的频率,调整限位装置与回转中心O的距离a,可改变振幅。
2 结构方案设计
依据上述线性振动原理,设计混凝土预制构件线性振动台方案,由于大多数混凝土预制构件振动台长宽比较大,因此在长度方向上布置2组上述装置,以保证整体运行的平稳性,该方案主要结构如图2所示。
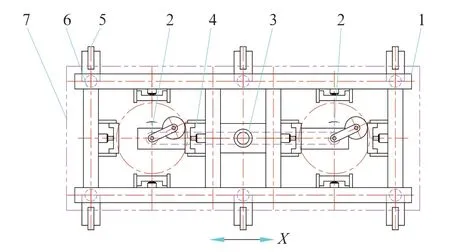
图2 振动台结构方案示意图
1)底架 底架作为振动台的主要结构件,用主要来安装其他结构、承载上部模台与混凝土的重量、传递振动,其由结构钢焊接而成,强度刚度大。
2)回转装置 两组回转装置与地面结构固定,布置在框架内部两端,主要由同步带轮、回转轴、回转臂、滚轮等组成,滚轮与限位装置接触时可以保证其推力一直垂直于限位装置平面,从而保证振动台始终保持线性运动。
3)同步驱动装置 同步驱动装置设置在两组回转装置之间,主要由变频电机、减速机、同步带轮、同步带组成,同步带轮可保证两组回转装置同步、同相位回转,变频电机调整回转装置转速,进而调整振动系统频率。
4)限位装置 每组回转装置四周设置四组限位装置,XY方向各分部两组,每组限位装置主要由限位板、导向装置、液压缸组成,通过液压缸调整限位装置与回转中心的距离,可调整振动系统的振幅,还可进行X与Y方向振动的转换。
5)夹紧装置 多组夹紧装置设置在底架外侧,主要用来夹紧固定上部的模台,夹紧装置主要由夹紧臂、液压缸组成,通过液压缸的伸缩可完成夹紧臂对模台的夹紧与松开。
6)支撑弹簧 支撑弹簧布置在底架底部,主要用来支撑整个系统,其由多组橡胶弹簧组成,底面与地面连接,上面与底架连接。
7)模台 模台主要作为混凝土构件的底模,安装边摸,承重混凝土,传递振动。
该振动台工作流程如下:当模台运动至振动台工位时,启动夹紧装置夹紧模台,布料机完成混凝土布料后振动台进行振动,按照要求,通过控制系统调整好所需要振动频率、振幅,启动振动台,驱动电机带动回转装置进行回转,产生X或者Y方向上的振动。
3 线性振动台的设计计算
由于振动台XY方向振动原理相同,选取X方向作为研究对象,由振动原理进行分析,将该振动台简化为单自由度无阻尼受迫振动系统,如图3所示。
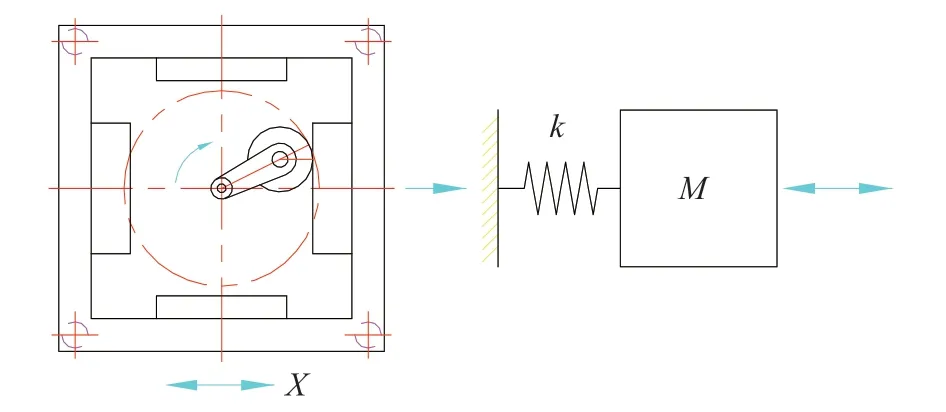
图3 振动系统简化示意图
K为系统弹簧的刚度,F为受迫振动的驱动力,对于从上述起始位置到摆臂回转至水平位置,滚轮推动限位板,其推力为驱动力,如图4所示。
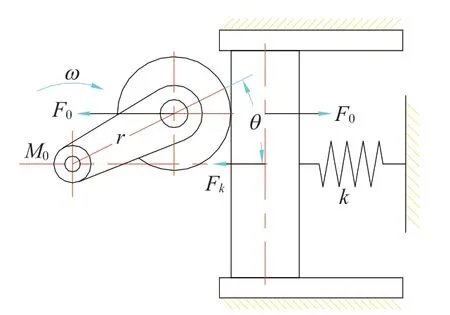
图4 滚轮驱动起始位置示意图
其计算公式为
式中F0——回转臂对限位装置的推力;
M0——回转臂的驱动力矩;
r——滚轮回转半径;
q——滚轮与限位板接触时摆臂与水平轴方向的初始夹角;
x——弹簧压缩量。
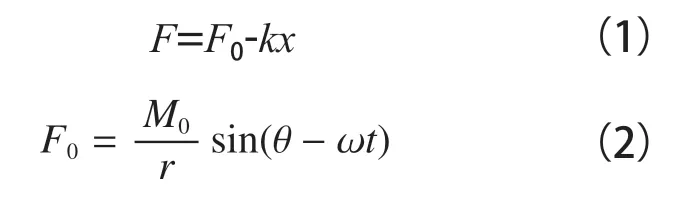
当摆臂转过水平位置,系统在弹簧回复力的作用下进行运行,如图5所示。
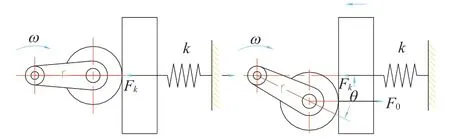
图5 滚轮驱动水平位置示意图
此过程中,由于回转臂转动速度较快,该过程中限位板与滚轮之间处于轻微接触,可以忽略F0,驱动力变为

由以上可知,对于整个周期内,如图6所示位置。
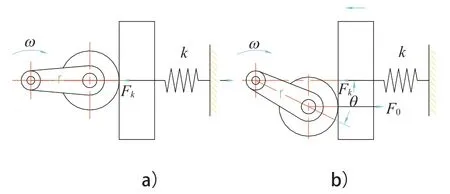
图6 滚轮驱动振动系统示意图
以图6a为初始位置,在一个周期内,滚轮推动限位装置时
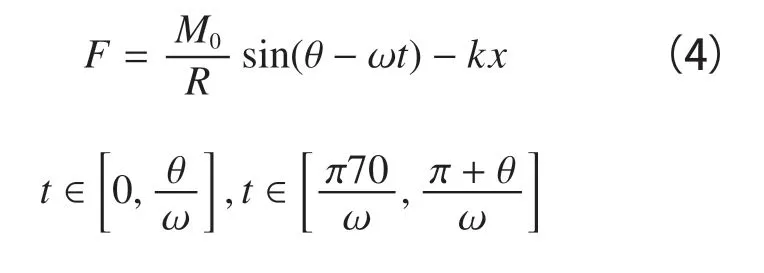
在一个周期内,滚轮不推动限位装置时
由以上分析可得,该系统为一个单自由度受迫振动,对于受迫振动过程,其运动微分方程为


由该系统结构原理可知,其振幅有系统结构决定,通过调节限位板与回转臂的中心距决定,其振动频率通过驱动机构的转速进行调节,现对其激振力、加速度进行计算分析。
对于该系统强迫振动的位移为

对其时间t求二次导,可得加速度a为
可得加速度的最大值

可得系统激振力的最大值

又由式(4)推导得驱动力矩

式中w——回转系统的角频率;
A——振幅;
q——滚轮与限位板接触时摆臂与水平轴方向的初始夹角;
Mz——振动系统的参振总重量;
M0——回转臂的驱动力矩。
由此可计算出系统的最大加速度、最大激振力、驱动力矩,进而进行系统功率设计计算。
对于该系统,未添加模具及混凝土时,振动台的固有频率为

式中m0——未加载模具和混凝土时振动台重量;
k——支撑弹簧总刚度。
对于该振动台,选用多组橡胶弹簧作为振动台的支撑,同时,橡胶弹簧也作为振动台的振动刚度,现对其进行分析计算,如图7所示。
图中m0——振动台空载重量;
m1——台面上部混凝土与模具重量;
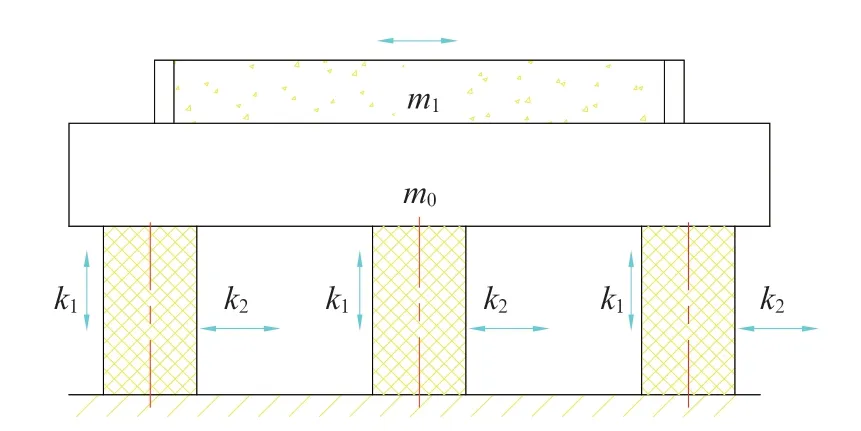
图7 振动台弹簧支撑示意图
k1——橡胶弹簧垂直方向的刚度;
k2——橡胶弹簧水平方向的刚度。
在垂直方向上,多组橡胶弹簧承载振动台与上部混凝土的重量,橡胶弹簧的数量为n,振动台满载时,橡胶弹簧压缩量为Dh,在垂直方向受力

即得弹簧垂直刚度

根据实际振动台工作要求,选取合适的压缩量Dh,合适的数量n,与振动台空载重量m0、与混凝土与模具重量m1,可以初步计算弹簧竖直方向的刚度k1。
对于水平方向,振动台进行振动时,由式(11)可得

由此为依据计算橡胶弹簧在水平方向上的刚度k2,综合橡胶弹簧垂直与水平方向的刚度,进行橡胶弹簧的设计选型。
由以上可得,在该系统中,已知主要参数,如总参振重量Mz,角频率w,振幅的情况下,可以对系统的驱动力矩、功率、弹簧刚度、最大加速度、最大激振力等参数进行设计计算,进而得出整个系统的设计参数。
4 结论
对于该线性振动台,采用多组同步同相位运行的带滚轮的摆臂,驱动整个振动台进行振动,由于滚轮与限位装置接触时驱动力的方向均垂直于限位装置,多组滚轮同步工作时,驱动振动台只能向同一方向运动,从而实现线性振动;另外,通过变频电机与同步驱动系统的应用,可简单有效地实现振动频率的调节;其次,通过液压系统驱动限位装置进行位置调节,可以实现X方向与Y方向振动的转换与振幅的调节。
通过分析计算,可对该类型振动台主要参数进行设计计算,计算结果可作为参考值指导整个设计与样机试验。
