基于卫星和无人机遥感数据尺度转换的土壤盐渍化监测研究
2020-11-19冯文哲王新涛赵亿祥李定乾唐新新张智韬
冯文哲,王新涛,2,韩 佳,2,赵亿祥,梁 磊,李定乾,唐新新,张智韬,2
(1.西北农林科技大学,水利与建筑工程学院,陕西 杨凌 712100;2.西北农林科技大学,旱区农业水土工程教育部重点实验室,陕西 杨凌 712100)
0 引 言
土壤盐渍化已成为干旱、半干旱地区土地退化的主要原因[1],严重影响当地农业经济的发展,同时对当地的生态安全构成威胁。准确高效的获取有关土壤盐渍化的地理分布、面积、盐渍化程度等方面的信息,对土壤盐渍化防治以及灌区的可持续发展有着重要的意义。
卫星遥感技术以其广泛、宏观、快速等优点,已成为大范围土壤盐渍化监测的新兴手段,在国内外得到了广泛的应用[2-8]。如周晓红等[9]利用Landsat8 OLI多光谱遥感影像计算植被指数反演土壤含盐量;Bouaziz[10]等利用MODIS遥感影像建立了预测半干旱地区土壤盐渍化的线性光谱分解(Linear Spectral Unmixing)模型。这些研究虽取得了一定的成果,但卫星数据普遍存在着高空间分辨率与高时间分辨率相矛盾的问题,为解决这个问题,王鹏新等[11]通过对MODIS数据进行降尺度处理,发现监测旱情的效果优于降尺度前;苏伟等[12]在反演LAI值时,发现经过对Landsat8 OLI遥感影像升尺度处理,将数据内在信息保存在低分辨率中,从而将点数据扩展到面数据,反演精度明显提高;王爽[13]等在构建土壤盐分监测模型时发现,经尺度转换后的模型精度(R2=0.708 4)要优于原模型(R2=0.592 5)。但以上均是卫星数据间的尺度转换。无人机作为新兴的工具,具有便携、高空间分辨率、灵活性高、飞行时间自主选择和能搭载多种光谱相机等优点,可快速高效的实现指定区域的遥感图像获取。将卫星大范围监测的优点与无人机高精度监测的优点相结合,可实现对土壤盐渍化的大范围高精度监测,目前这方面的研究较少。陈俊英等[14]虽采用改进的TsHARP升尺度方法,将无人机数据与卫星数据相结合,通过无人机建立的趋势面应用到GF-1卫星尺度上来实现监测精度的提高,但其使用的是多元线性回归、逐步回归、岭回归这些传统回归方法,模型稳定性较差、易受到变量数或样本数的影响,同时传统回归方法可能存在估计和检验误差,使得预测精度受到一定限制。机器学习模型可以有效弥补传统回归方法的不足,已在土壤盐分反演方面得到了许多应用[15-17]。
因此本文以河套灌区沙壕渠灌域0~20、20~40 cm深度土壤为研究对象,采用BP神经网络模型、SVM模型、ELM模型,构建无人机数据与GF-1卫星数据的盐渍化监测模型,通过重采样方法对无人机数据进行尺度转换,用尺度转换后的无人机数据对GF-1卫星数据进行修正,并进行建模比较,为提高卫星遥感监测土壤盐渍化的精度提供参考。
1 材料与方法
1.1 研究区概况
沙壕渠灌域是内蒙古河套灌区西北部解放闸灌域(40°30′~41°17′N,106°33′~107°31′E)内的一个独立个体。如图1所示,该灌域位于西北高原地带,平均海拔高于1 010 m,属于典型的干旱半干旱性气候。夏季高温少雨,冬季严寒少雪,多年平均气温为7 ℃,多年均降雨量140 mm,蒸发量2 000 mm[15]。主要农作物是小麦、白菜、葵花和玉米,同时还夹杂种植一些辣椒、番茄、西瓜等作物。由于降水少、蒸发大,再加之气候等多种因素的共同作用,导致了此地较为严重的土壤盐渍化问题。
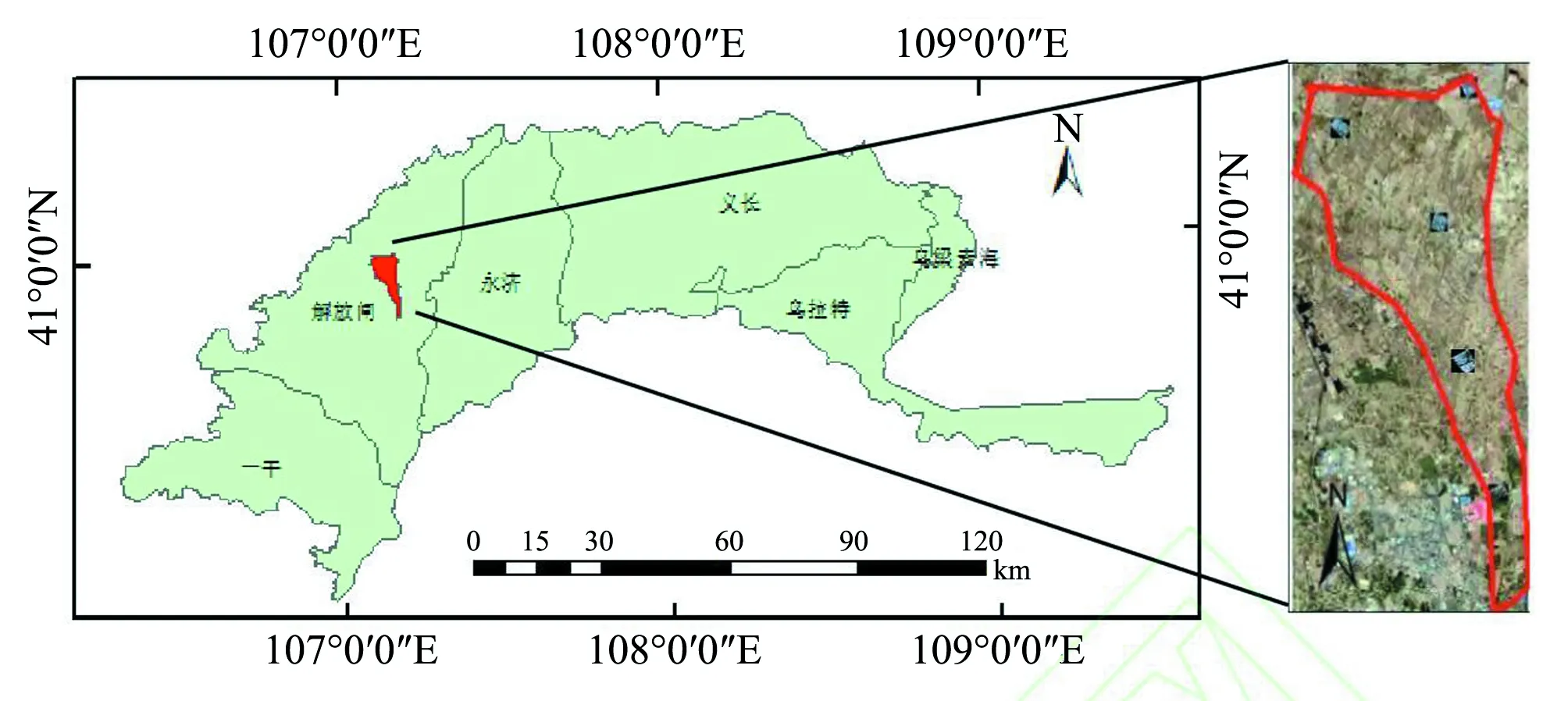
图1 研究区示意图Fig.1 Map of research area
1.2 数据来源与处理
1.2.1 GF-1多光谱遥感影像的获取及预处理
GF-1影像在中国资源卫星应用中心下载(www.cresda.com)。成像时间为2018年6月19日,与采集土壤样点日期同步,高分一号卫星数据的重访周期为4 d,空间分辨率为16 m,包括了4个波段,分别为蓝波段(450~520 nm)、绿波段(520~590 nm)、红波段(630~690 nm)和近红外波段(770~890 nm)。使用ENVI5.3.1软件对下载好的影像进行几何精校正、辐射定标、大气校正等预处理,经镶嵌、剪裁后得到研究区域卫星影像图,再将实地测点的经纬度信息导入到GF-1遥感影像里,提取各个实验点的像元反射率。
1.2.2 无人机多光谱遥感影像的获取及预处理
本研究所使用的无人机为大疆创新科技有限公司生产的M600型六旋翼无人机,其搭载的多光谱相机传感器为美国Tetracam公司生产的Mirco-MCA多光谱相机(简称MCA),具有质量轻、体积小及远程触发的特点。MCA包括了6个波段的光谱采集通道,分别为蓝波段(490 nm)、绿波段(550 nm)、红波段(680 nm)、红边波段(720 nm)、近红外波段1(800 nm)、近红外波段2(900 nm)。实验选取了盐渍化程度不同的5个区域进行无人机飞行实验,无人机飞行模式按照提前规划的航线飞行,拍照时相机镜头垂直向下,拍照模式为等时间间隔拍照。多光谱影像获取时间为2018年6月中旬,飞行天气晴朗,飞行高度为120 m,此时影像的地面分辨率为0.065 m。将多光谱正射影像进行提取、配准与合成处理后导出为6波段的多光谱TIF影像,提取图像中对应采样点的反射率。
1.2.3 土壤盐分数据获取
控制地面采样时间、无人机飞行时间与GF-1卫星过境时间一致,采用五点法于5个实验区均匀取样,共设置80个采样点。土样采集编号后带回实验室进一步分析,将土样配置为水土比为5∶1的土壤溶液,并搅拌、静置、沉淀、过滤后,采用电导率仪(DDS-307型,上海佑科仪器公司)测定土壤溶液电导率,每个采样点的电导率EC1∶5为5个土样电导率的平均值,通过经验公式计算土壤含盐量SSC=(0.288 2EC1∶5+0.018 3)[18]。剔除3个异常值,将剩余的77个样本从小到大排序,建模集和验证集按照2∶1的比例等间隔分配。设置建模集共51个样本点,验证集共26个样本点。无人机采样点影像如图2所示(仅展示其中一个区域)。

图2 无人机采样点影像Fig.2 Sampling point image of UAV
1.3 光谱指数构建
共采用10个光谱指数,分别为归一化植被指数(Normalized difference vegetation index,NDVI)、盐分指数 (Salinity index,SI-T)、归一化盐分指数(Normalized difference soil index,NDSI)、盐分指数1(Salinity index 1,SI1)、盐分指数2(Salinity index 2,SI2)、盐分指数3(Salinity index 3,SI3)、盐分指数(Salinity index,S1)、盐分指数(Salinity index,S2)、盐分指数(Salinity index,S3)以及联合光谱指数(Combined spectral response index,COSRI),计算公式如表1所示。
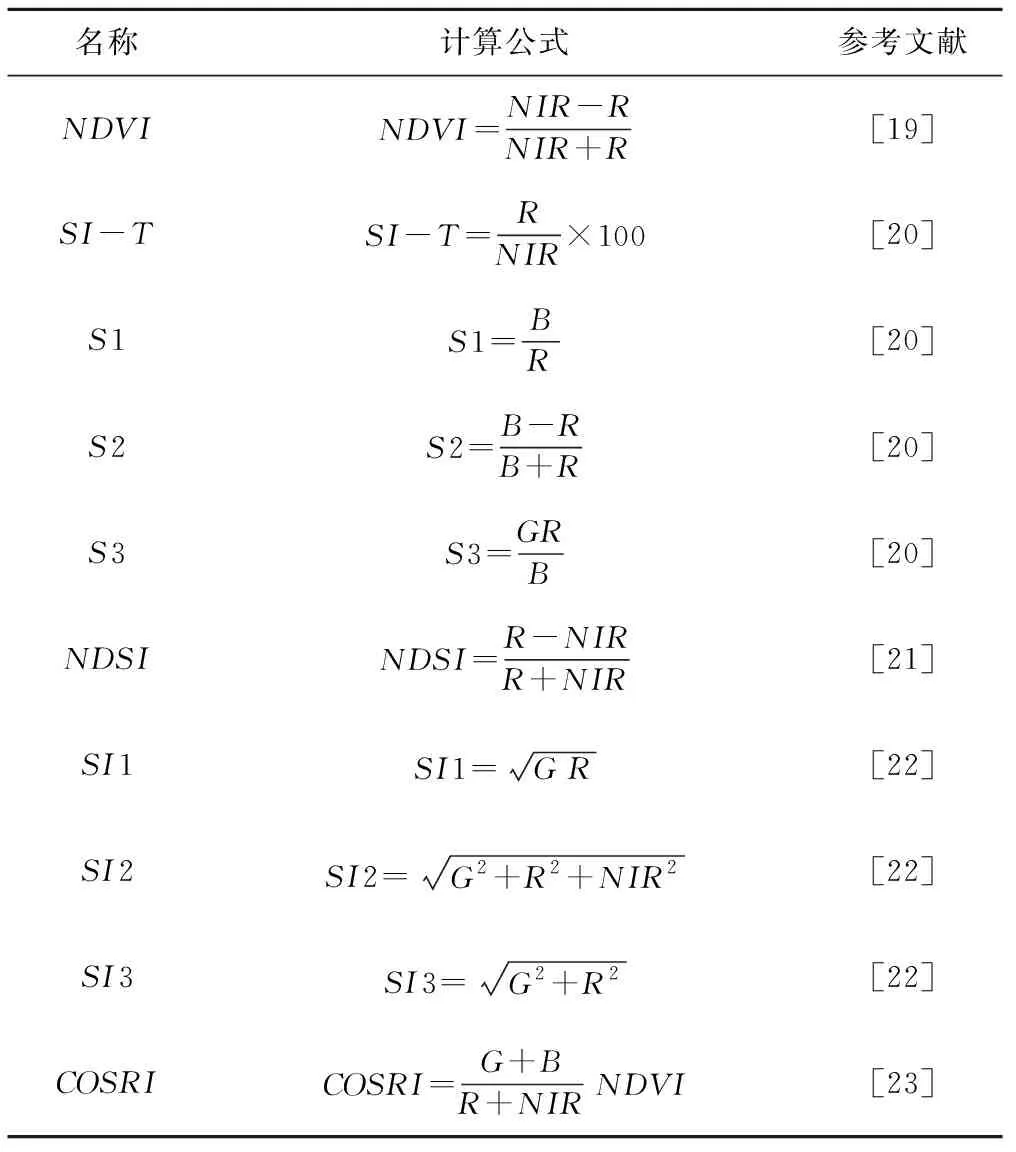
表1 用于反演土壤盐度的光谱指数Tab.1 Spectral index for inversion soil salinity
1.4 尺度转换原理
无人机多光谱遥感影像和GF-1卫星多光谱遥感影像的空间分辨率分别为0.065m以及16m,两种影像在相同的面积内包含的像元数相差较大,为减少这种误差,需对无人机多光谱遥感影像数据作尺度转换,尽量保持两者像元数一致。
本研究采用重采样方法对无人机数据进行尺度上推,将分辨率为0.065 m的无人机数据上推至GF-1卫星数据16 m的分辨率。具体做法为:找出时间范围对应的无人机和GF-1卫星影像数据,找出研究区域,使用ENVI5.3.1软件中重采样的尺度上推方法对实验区域进行尺度上推,得到尺度转换后的无人机多光谱遥感数据。为提高GF-1卫星反演模型的预测精度,增加预测的可靠性,采用尺度转换后的无人机光谱指数修正GF-1卫星数据光谱指数。这个修正方法是基于尺度转换后的无人机数据与GF-1卫星数据分辨率相同的前提下实现的,将无人机数据与GF-1卫星数据相结合,因为相同面积内包含的像元数大致相同,可减少由于分辨率问题引起的误差,由于两者成像时间相近,避免了时间滞后性引起的误差。
大尺度上土壤盐分模型的自变量,应是修正后的光谱指数,计算式为:
S=f(XC)
(1)
式中:S为大尺度上模型反演的土壤含盐量;f为盐分反演函数;XC为修正后的光谱指数。
具体为无人机数据重采样到16 m后构建的光谱指数,乘以对应的GF-1卫星光谱指数。
1.5 模型介绍
1.5.1 BP神经网络模型
BP(back propagation) 神经网络是1986年由Rumelhart和McClelland为首的科学家提出的,是一种按照误差逆向传播算法训练的多层前馈神经网络,有强大的非线性映射能力和自学能力,是目前应用最广泛的神经网络之一,有学者将其应用到盐渍化程度反演监测的问题中[24,25]。3层BP神经网络的普适性最强,本文采用3层BP神经网络,按照训练结果误差相对较小的原则,应用RStudio软件编写程序,建立土壤盐分动态模型,隐层节点数和权值的衰减参数通过多次实验及参数寻优算法,最终确定隐层节点数为5、权值的衰减参数为0.001,其余参数取默认值。
1.5.2 支持向量机模型
SVM是一类按监督学习(supervised learning)方式对数据进行二元分类的广义线性分类器(generalized linear classifier)。SVM模型是在以结构风险最小化为原则的理论基础下,将原数据从线性可分的状态转化为线性不可分的状态,尽可能避免离散值多等问题[26],目前在回归问题上也有应用[27-30]。本文应用RStudio软件编写程序,建立土壤盐分动态模型,设置核函数类型为“radial”,并且根据所写的程序进行参数寻优,根据均方根误差(RMSE)最小的原则确定了参数γ=0.01,C=1 000。
1.5.3 极限学习机模型
ELM是一类基于前馈神经网络(Feedforward Neuron Network, FNN)构建的机器学习系统或方法,适用于监督学习和非监督学习问题[31]。在训练之前设置网络隐含层节点个数和激励函数,算法模型在执行过程中自动匹配隐含层和输出层的输出权值,它克服了传统神经网络训练速率较慢、很容易陷入局部最优导致对整体结果造成误差以及对学习率敏感等方面的缺点[32],具有学习速度快、泛化性能良好、改进潜力大等优点。
1.6 评价指标
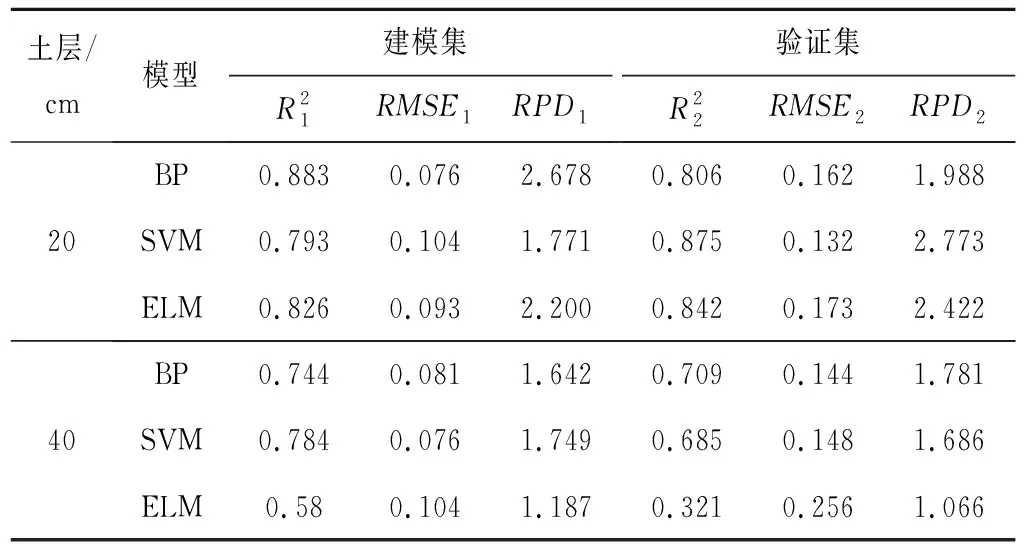
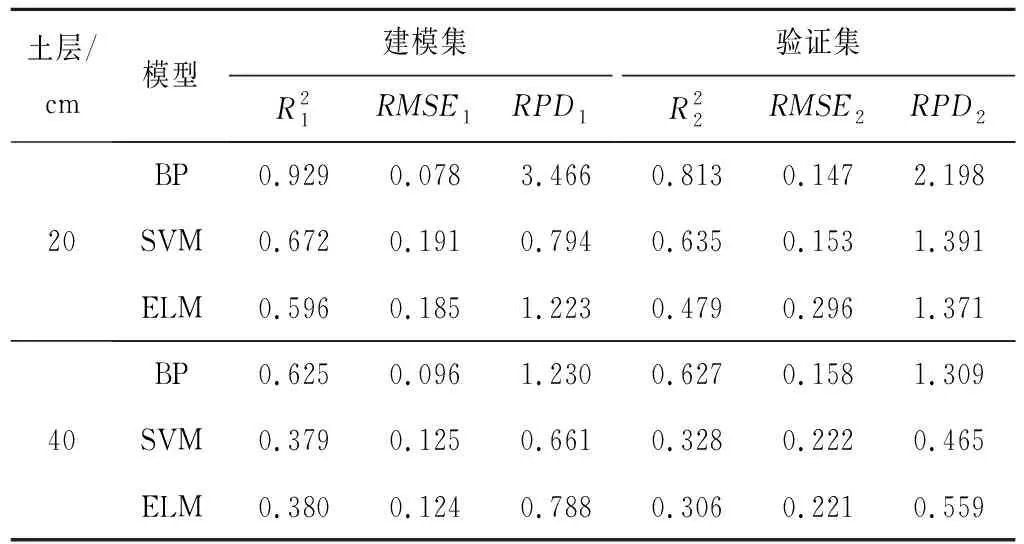
本文采用R2、RMSE以及RPD来综合评价模型精度。R2可以反映建模和验证的拟合精度高低;RMSE可以反映盐分值预测结果与实际测得盐分值之间的偏差度;而RPD可以反映模型预测能力的强弱。一般来说,当RPD<1.0时表明模型不具备预测能力;当1.0 (2) (3) 利用实验室分析所得的土壤表层0~40 cm平均盐分数据(0~40 cm土层实测盐分是20 cm与40 cm实测盐分的平均值),对77个采样点含盐量进行统计处理,统计情况如表2所示。 表2 实验区盐渍化程度Tab.2 Degree of salinization in the experimental area 变异系数是用来反应数据离散程度的一个归一化量度,相比于标准差,变异系数不需要参照数据的平均值,变异系数越大则说明变异程度越大。由表2可得知5块地中实测值的变异程度的排序为:第一块地>第四块地>第三块地>第五块地>第二块地。 将实验室分析所得的土壤含盐量样本分为4个等级[15]:非盐渍化土(<0.2%)、轻度盐渍化土(0.2%~0.5%)、重度盐渍化土(0.5%~1.0%)和盐土(>1.0%)。统计情况如表3所示。 表3 土壤盐渍化程度Tab.3 Degree of soil salinization 盐渍化程度不同的地区往往也会存在土壤异质性[34],本文引用洛伦兹曲线的原理来表征植被指数空间异质性。由于NDVI是比较常见的光谱指数,故以NDVI的空间异质性来表征土壤异质性。实验在5块地的无人机影像内分别截取了2 000 m×2 000 m大小的部分,并将其绘制于图3内。 图3 NDVI洛伦兹曲线Fig.3 The Lorenz curve of NDVI 图3中的直线表示研究区域内NDVI空间上的分布绝对均匀,而在实际中这个是不现实的,一般都为下凸的曲线,通过下凸程度的不同可以判断出NDVI异质性的大小。即下凸程度越大,此区域内NDVI的分布越不均匀,异质性也就越大。由图3可以看出在5块地中,NDVI异质性的排序为:第一块地>第四块地>第三块地>第五块地>第二块地。这与实验区实测盐分变异系数大小顺序一致,两者呈正相关。 将实测土壤盐分值记为因变量组,无人机影像与卫星图像处理所得的NDVI、SI-T、NDSI、SI1、SI2、SI3、S1、S2、S3、COSRI等10个光谱指数分别记为不同的自变量组。 2.3.1 无人机数据反演土壤盐分研究 将尺度转换前的无人机数据作为自变量输入模型,针对不同深度的实际状况,分别采用BP、ELM、SVM机器学习回归模型,R2、RMSE、RPD等作为模型精度的验证指标,结果如表4所示。 表4 基于无人机数据下的土壤含盐量模型评价表Tab.4 Evaluation table of soil salinity model based on UAV data 繁华尽去逐香尘,流水无情草自春。清秋走了,燕西走了,小玲走了,晚香走了,秀珠走了……金粉情场中的众人最终身家败落,各自飘零,携带着不同的心事和品格,失散在一个动荡的年代中。 2.3.2 GF-1卫星数据反演土壤盐分研究 将GF-1卫星数据作为自变量输入模型,针对不同深度的实际状况,分别采用BP、SVM、ELM机器学习回归模型,并做以模型精度指标验证,得到的结果如表5所示。 表5 基于卫星数据下的土壤含盐量模型评价表Tab.5 Evaluation table of soil salinity model based on satellite data 将修正后的GF-1卫星数据作为自变量输入模型,分别建立BP、SVM、ELM机器学习回归模型,并做以模型精度指标验证,得到的结果如表6所示。 表6 基于修正后卫星数据下的土壤含盐量模型评价表Tab.6 Evaluation table of soil salinity model based on modified satellite data 不同数据源2种深度下的3种机器学习模型预测土壤盐分值与实测土壤盐分值比较如图4所示。从图4可以看出,GF-1卫星数据模型的预测值与实测值的拟合效果不理想,并且在20 cm深度下极限学习机模型的预测值里还存在不合理的负值。无人机数据模型的预测值和实测值的拟合效果基本良好,除40 cm深度下的极限学习机模型之外,其余模型无不合理值出现,20 cm深度下3个模型中效果最好的是SVM模型;40 cm深度下3个模型中效果最好的是BP模型。在修正后的GF-1卫星数据散点图中,BP神经网络模型拟合效果最优,且无不合理值出现,说明修正后的卫星数据进行土壤盐分反演是行得通的。无人机数据和经过修正后的GF-1卫星数据模型的预测值与实测值的拟合效果均优于GF-1卫星数据模型。综合散点图可以得出20 cm深度的模型拟合效果均优于40 cm深度的拟合效果。 图4 土壤含盐量预测值与实测值比较Fig.4 Comparison of soil salt content prediction with measured value 研究不同深度下的土壤盐渍化模型,对实时监测以及改善灌区土壤盐渍化问题具有很大意义。本文通过3种机器学习算法对实验区的土壤含盐量进行建模反演,结果表明无人机数据建模精度均高于GF-1卫星数据建模精度,这与陈俊英等[14]通过无人机与卫星遥感升尺度盐渍化监测时,研究的结果基本一致。这是由于和GF-1卫星数据相比,无人机数据的空间分辨率更高,且获取数据的时间更加自由多变,可以人为选择最适合飞行的时间段进行实验,然而GF-1卫星数据受到气候环境因素影响更大。本文引入的3种回归算法模型与传统回归模型相比,机器学习模型拥有极强的学习能力、逼近绝大多数非线性关系的能力、较强的泛化能力、较好的鲁棒性和容错性,总的来看要优于传统的回归模型[15-17]。 原始卫星数据建模分析精度相对较低,本文使用无人机数据进行重采样,生成分辨率为16 m的遥感影像,通过其对卫星光谱指数的修正,配合机器学习算法进行拟合,提高了GF-1卫星遥感数据对土壤含盐量建模反演的精度,这与姚远等[35]研究的结果基本一致。由于尺度上推后的无人机数据对卫星数据的修正以及机器学习算法的引入,两者相结合,有效提高了卫星遥感反演模型的精度与可靠性。在做机器学习模型预测值与实测值的拟合效果分析时,发现预测值中存在不合理的值,这有可能是作为自变量的光谱指数值自身存在着误差,导致模型预测时出现不合理值。研究结果显示20 cm深度下的土壤含盐量预测效果要远远好于40 cm,这可能与当地的气候特征及灌溉制度有关。三四月份春灌之后,五六月份还未到雨季,此时气候干旱、蒸发强烈,正处于土壤返盐状态,大量盐分上移至地表甚至析出,形成盐壳等,故20 cm浅层土壤盐分模型效果优于40 cm。 传统的重采样尺度上推方法在保持遥感空间特征方面还有些许欠缺,且土壤盐渍化的反演模型会受土的种类、灌溉情况、温度、湿度、天气状况、甚至是在本文中所使用的尺度转化方法和遥感平台等多个因素的共同影响。因此本文所得的最优土壤含盐量反演模型也仅限于本次实验,在其他月份以及其他地区还需要进一步的探索。 (1)对实验区的异质性分析得到的结果为第一块地>第四块地>第三块地>第五块地>第二块地。这与实验区实测盐分变异系数大小顺序一致。 (2)对比分析了基于不同数据源建立的模型精度,高分辨率的无人机数据模型精度统一优于低分辨率的GF-1卫星数据。无人机数据源下20 cm深度SVM模型最优、40 cm深度BP模型最优, 卫星数据源下20 cm深度SVM模型最优、40 cm深度BP模型最优。 (3)对比发现通过尺度转换后的无人机数据对GF-1卫星数据修正,可提高GF-1卫星遥感对土壤盐渍化的监测精度。BP模型R2可提高0.4~0.5,RMSE至少可减小0.061,RPD至少可提高1.308。
2 结果与分析
2.1 土壤盐渍化程度统计


2.2 土壤异质性分析
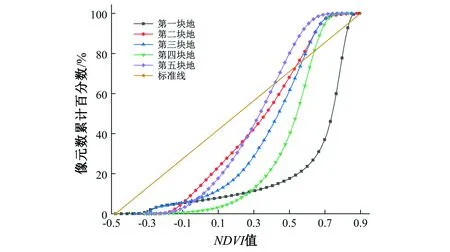
2.3 无人机数据与GF-1卫星数据建模

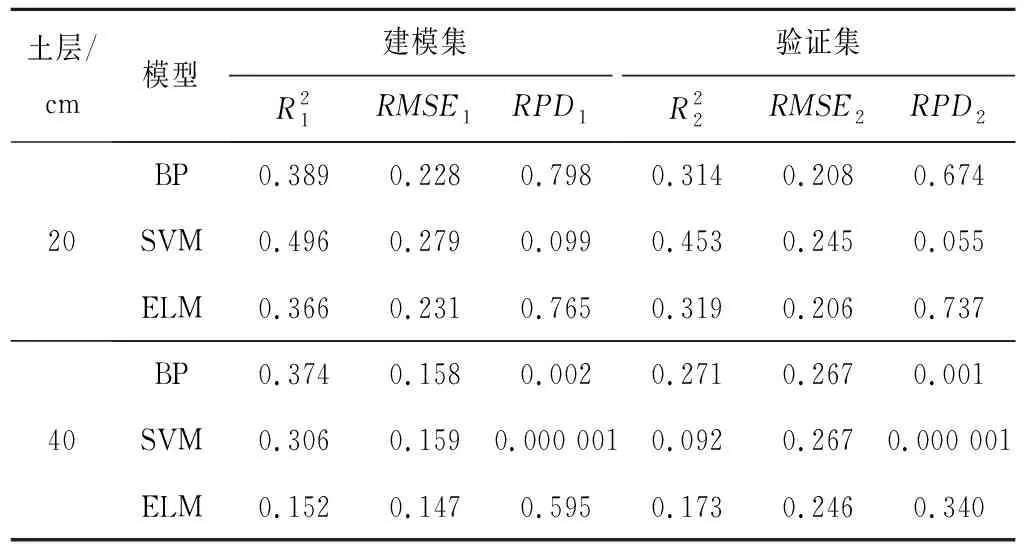
2.4 修正后GF-1卫星数据建模

2.5 模型综合评价

3 讨 论
4 结 论
