基于PLC的自走式单轨运输机驾驶控制系统设计
2020-11-16王琢张俊峰肖进张唐娟罗欣田满洲罗友谊
王琢 张俊峰 肖进 张唐娟 罗欣 田满洲 罗友谊


摘要 山区丘陵地带适合种植柑橘等水果,然而果实和肥料的运输成为一件耗时、费力的工作,以汽油机为动力输出的自走式单轨运输机可以解决上述问题。面向自走式单轨运输机设计了一套基于PLC的驾驶控制系统,对CPU、遥控、电动直线推杆等关键模块进行了选型,完成了机械结构的电气化改造以及电路系统硬件组态和控制系统逻辑设计,实现了运输机前进、后退、刹车操作的遥控控制和现地控制。经测试,该系统功能满足要求,稳定可靠。
关键词 运输机;果园;PLC;遥控;控制系统
中图分类号 S24 文献标识码 A
文章编号 0517-6611(2020)20-0222-03
doi:10.3969/j.issn.0517-6611.2020.20.058
Design of Driving Control System of Self-propelled Monorail Conveyer Based on PLC
WANG Zuo, ZHANG Jun-feng, XIAO Jin et al (Wuhan Academy of Agricultural Sciences, Wuhan,Hubei 430345)
Abstract The hilly areas are suitable for citrus and other fruits. However, the transportation of fruits and fertilizers becomes a time-consuming and laborious task, which can be solved by self-propelled monorail conveyor powered by gasoline engines. The author designed a set of driving control system based on PLC for self propelled monorail conveyor. CPU, remote control, electric putter and other key modules were selected, the electrical transformation of the mechanical structure and the hardware configuration of the circuit system and the logic design of the control system were completed, and the remote control and local control of the forward, backward and brake operation of the transport aircraft were realized. After testing, the system functions could meet the requirements, it was stable and reliable.
Key words Conveyor;Orchard;PLC;Remote control;Control system
水果是人類饮食中不可缺少的重要组成部分,不仅含有丰富的营养成分,而且能够帮助胃肠道消化。随着人们生活水平的提高和改善性需求的增长,水果在农业经济中占据的地位也不断提高。2018年我国水果产量约25 688.35万t,进口量约572.5万t,出口量约357.05万t,国内水果需求量约 25 903.8万t,国内水果销售市场规模达到2.03万亿元。其中,柑橘产量达到41 38.1万t,是我国栽培面积及产量最大的水果。广西、湖南、江西、四川、湖北等南方地区是我国主要的柑桔产区。目前,我国柑橘品种已逐步走向良种化、区域化、规模化生产,然而大量的柑桔等果园都建立在山区丘陵地带。山区丘陵地带是我国农业机械化的一大短板,其地理特征决定了大型农业机具无法作业,此外,山区丘陵地带还存在电气化、信息化程度低等问题,在山坡上安装电缆是一件成本极大的工程,且存在蜂窝网络信号弱的问题。为了解决山区丘陵地带果园内果实和肥料运输的问题,华中农业大学研发了一套以汽油机为动力输出的自走式单轨运输机,用户在运输机旁边操纵机械式推杆,实现运输机的前进、后退、刹车 [1-3]。在这种方式下,用户必须跟随运输机在山间运动,以便于实时进行运行状态的切换,没有彻底摆脱人力的干预。虽然它从一定程度上解决了运输机械化的问题,但信息化程度较低。PLC是一种专门为在工业环境下应用而设计的数字运算控制器,随着农业生产工业化的发展,近年来PLC也常被应用在农业领域 [4-7]。为了进一步提高该运输机的工作效率,笔者设计了一套基于PLC的自走式单轨运输机驾驶控制系统。
1 总体设计
目前,果农通过操控2个机械推杆实现单轨运输机的前进/后退、运行/刹车控制,为了实现远程遥控控制,必须对现有机械式推杆进行电气化改造。系统采用电动直线推杆代替人力操控,通过PLC搭建驾驶控制系统,利用工业遥控实现远程控制。自走式单轨运输机示意图如图1所示。
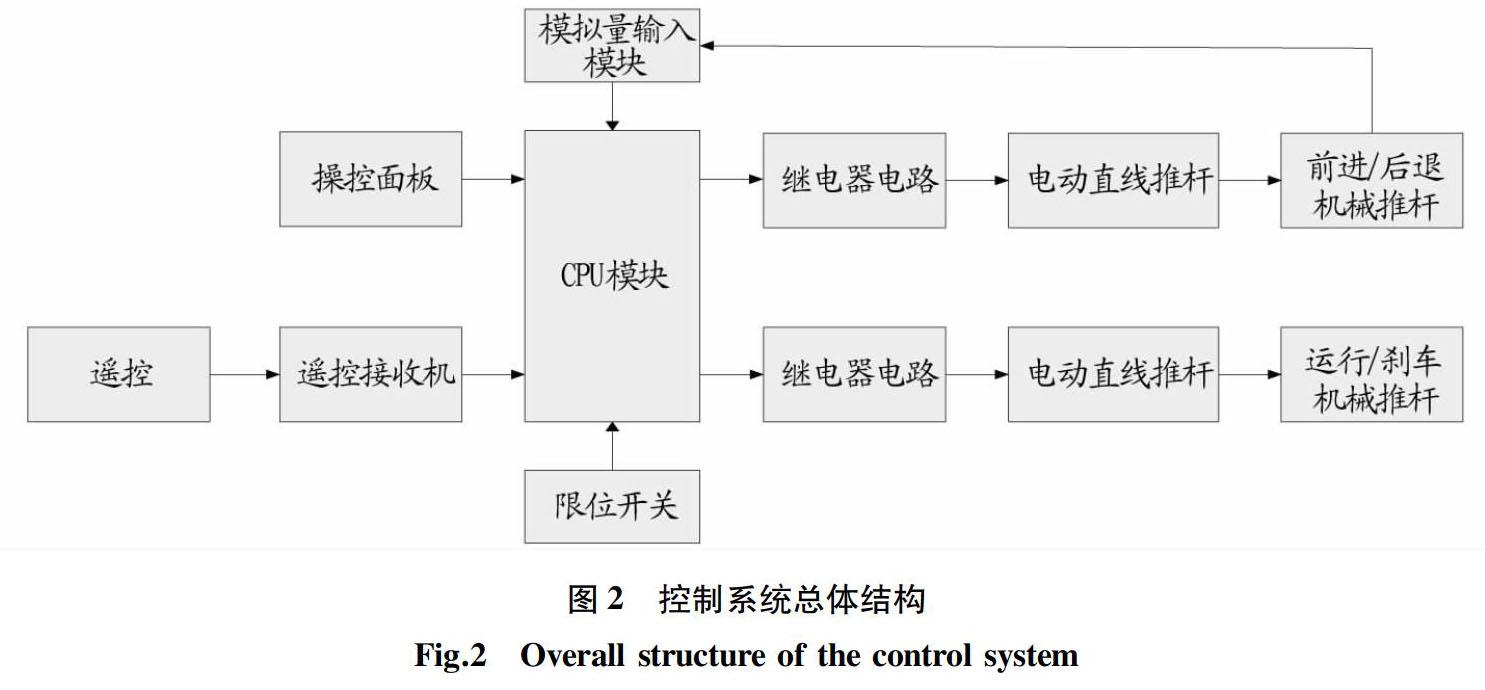
系统由CPU模块、模拟量输入模块、操控面板、遥控、遥控接收机、限位开关、继电器电路、电动直线推杆、前进/后退机械推杆、运行/刹车机械推杆组成(图2)。CPU模块采用LOGO!逻辑模块,主要作用是根据输入信号控制继电器电路动作,从而改变电动直线推杆运动状态。操控面板是现地控制的操控设备,带有3个按键,分别表示前进、后退、刹车操作。遥控及遥控接收机采用433MHz的远距离遥控方案 [8-9]。限位开关的作用是防止单轨运输机冲出轨道两端,当运输机行驶到轨道两端时,限位开关动作使运输机自动刹车 [10]。继电器电路是每组采用2个继电器实现电动直线推杆内部直流电机的正反转,从而驱动电动直线推杆伸缩运动。电动直线推杆是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置,其内部包含直流电机、电位计等单元,继电器电路控制直流电机旋转方向,从而控制电动直线推杆伸缩运动。同时,电位计输出模拟电压信号,并通过模拟量输入模块传递给CPU模块,CPU在线监测推杆的位置,从而获取机械推杆的档位。
2 硬件系统设计
2.1 电动直线推杆选型与电路设计
果农在推拉前进/后退机械推杆时,推力为100 N,力臂为350 mm,电动直线推杆安装处的力臂为40 mm,根据力矩平衡原理,可计算出控制前进/后退的电动直线推杆至少需要875 N的推力,同理得到控制运行/刹车的电动直线推杆至少需要383 N的推力。单轨运输机在山区丘陵地带作业,因此电动直线推杆的防护等级至少需要IP66。根据运输机使用的频率,选择25%工作制的电动直线推杆。根据控制前进/后退和控制运行/刹车的电动推杆安装位置,行程分别为50和100 mm。根据上述要求,选择的电动推杆型号分别为LAM3-S4-50-ROE- DC24V-PS和LAM3-S2-100-ROE-DC24V-PS,最大运行速度分别为8和17 mm/s。
图3为其中一路电动推杆的控制电路,M+和M-是电动直线推杆内部直流电机的电源,通过改变其电源极性,可以
控制电动推杆伸缩运动。当KA1线圈得电、KA2线圈失电时,KA1触点接通,KA2常闭触点接通,M+和M-连接到电源24 V和GND,电动推杆伸出;当KA1线圈得电、KA2线圈也得电时,KA1触点接通,KA2常开触点接通,M+和M-连接到电源GND和
24 V,电动推杆缩回;当KA1线圈失电时,KA1
触点断开,M+和M-与电源断开,电动推杆停止伸缩。
2.2 CPU选型与电路设计
考虑山区丘陵地带的环境比较恶劣,同时汽油机在运行时会造成单轨运输机整体出现振动的现象,因此系统选择稳定性更好的PLC作为控制单元。PLC凭借优异的可靠性和完整的功能模块,通常应用在工业过程控制系统和运动控制系统中。LOGO!是一款功能满足系统要求,且成本较低的智能逻辑控制器。系统选择的LOGO!12/24RECo经济型CPU采用24 V直流电源供电,拥有8个数字量输入接口和4个继电器输出接口,继电器触点最大电流为10 A。
CPU模块及外围电路如图4所示,数字量输入通道I1、I2、I3与遥控器接收机的D0、D1、D2连接,分别代表前进、后退、刹车信号。数字量输入通道I4、I5、I6与操控面板的按钮SB1、SB2、SB3连接,分别代表前进、后退、刹车信号。输出继电器Q1和Q2负责前进/后退推杆控制,Q3和Q4负责运行/
刹车推杆控制。在遥控控制方式下,当果农按下遥控器的“前进”键,D0输出24 V,I1检测到高电平;当按下 “后退”键时,D1输出24 V,I2检测到高电平;当按下 “刹车”键时,D2输出24 V,I3检测到高电平。CPU模块根据输入电平控制输出继电器Q1、Q2、Q3、Q4触点接通或断开,如表1 所示。
3 软件系统设计
软件控制流程如图5所示,系统上电开机后,首先进行设备初始化,主要通过模拟量输入模块检测前进/后退档位
是否为空档,运行/刹车档位是否为刹车档,然后CPU循环扫描是否收到前进、后退、刹车控制信号。如果果农按下遥控“前进”键, CPU首先检测运行/刹车档位是否处于刹车档,如果是则接通输出继电器Q1接通,使电动推杆将机械推杆推至前进档;若否则先接通Q3,使电动推杆将机械推杆推至“刹车”档,在进行后续控制逻辑。当完成“前进”档设置后,然后接通Q3、Q4,使电动推杆将机械推杆推至“运行”档,单轨运输机就可以往前运行了,当完成“运行”档设置后断开Q3、Q4。如果果农按下遥控“刹车”键或限位开关动作,CPU都会收到刹车的控制信号,接通Q3并断开Q4,使电动推杆将机械推杆推至“刹车”档,单轨运输机实现 刹车。
4 结语
笔者设计了一种基于PLC的自走式单轨运输机驾驶控制系统,以电动直线推杆作为执行机构,对机械推杆进行电气化改造,以LOGO!逻辑模块作为控制系统的CPU,选择433 MHz工业遥控及其接收机搭建无线通讯系统。系统有效实现了自走式单轨运输机的远程遥控控制和现地控制,遥控距离可达到200 m,系统抗干扰性强、成本较低,适宜在山区丘陵地带使用。
参考文献
[1]
李学杰,张衍林,张闻宇,等.自走式山地果园遥控单轨运输机的设计与改进[J].华中农业大学学报,2014,33(5):117-122.
[2] 张俊峰.山地果园单轨运输机遥控关键技术与装置的研究[D].武汉:华中农业大学,2012.
[3] 张俊峰,李敬亚,张衍林,等.山地果园遥控单轨运输机设计[J].农业机械学报,2012,43(2):90-95.
[4] 石昌飞,宋淑然,洪添胜,等.山地果园牵引式货运车无线限位及遥控装置设计与试验[J].广东农业科学,2014(1):169-172,187.
[5] 欧阳玉平,洪添胜,苏建,等.山地果园双轨运输机自动停车系统设计:基于PLC[J].农机化研究,2015(8):237-241.
[6] 邱韶峰,黄杰,宋涛.PLC控制在农业机械中的应用[J].山东农机化,2017(2):47-48.
[7] 周争昊.浅谈PLC技术在农业机械上的应用[J].农业装备技术,2015,41(4):19-21.
[8] 刘易,池旭彬,颜少华,等.山地果园电动单轨运输机远程遥控系统设计[J].現代农业装备,2018(4):43-49.
[9] 张俊峰,张衍林,张唐娟,等.自走式山地单轨运输机遥控系统的设计[J].华中农业大学学报,2012,31(6):792-796.
[10] 罗瑜清,洪添胜,李震,等.山地果园电动单轨运输机控制装置的设计[J].西北农林科技大学学报(自然科学版),2016,44(3):227-234.