用于产品高速运动下缺陷检测的演示装置
2020-11-13孙多洋严小诚叶传刚
孙多洋,严 豪,严小诚,叶传刚
(1.中国电子科技集团公司第四十一研究所,安徽 蚌埠 233000;2.湖北中烟工业有限责任公司广水卷烟厂, 湖北 广水 432700)
一、引言
现代化工业机器生产技术应用越来越广,生产速度越来越快,传统的人工抽检方式已经不能满足现在的生产需要,高速生产过程中产品的外观有一定几率产生缺陷,缺陷产品流入市场影响企业的形象,给消费者留下不好的影响。基于“新基建”5G技术和工业物联网的提出,本文利用视觉检测技术对产品外观缺陷进行检测,利用5G CPE进行大量图像数据传输,给出伺服电机和工业相机的选型,对演示装置进行整体结构设计。
二、整机结构设计
(一)整机主要技术要求

图1 整机结构示意图
整个装置设计检测工件1000个/min,由6个部分组成,如图1所示。其中,检测组件是核心部分,负责图像的采集和工件的平稳运行;控制部分位于下框架组件中,负责数据的处理、分析和自学习;丝杆调节台主要调节工业相机和光源与工件之间的距离,确保图像采集的清晰,便于更好的检测;5GCPE是一种接受移动信号并以无限WIFI信号转发出来的移动信号接入设备,它也是一种将高速5G信号转换成WIFI信号的设备,可支持同时上网的移动终端数量也较多,大量应用于单位,工厂,小区等无线网络的接入,能节省铺设有线设备的费用[1];显示器用于人机交互,把采集到的图像呈现出来,可在其上设置多个缺陷检测点,设置合适的极值即可检测出缺陷工件,在下个工位剔除。
(二)检测组件结构方案
本装置从顶部和侧面对工件进行图像采集检测,工业上触发相机拍照的方式有传感器触发和相位触发,本文利用编码器采集相位,使用相位触发拍照。传统的多工位转台是由电机通过涡轮蜗杆传动、凸轮分割器、不完全齿齿轮传动、槽轮机构等驱动主轴,最终带动转盘及工件转动[2-3]。这些结构方式相对来说比较复杂,传动效率较低,不好实现定点拍照的需求。依据上文分析可知,检测组件的旋转台对运动精度的要求较高,因此检测组件的结构设计如图2所示。

图2 检测组件结构示意图
伺服电机输出轴与联轴器一端相连,联轴器另一端通过轴与旋转台上的轴承相连,电机固定在下框架组件的平台上。设计这种类型结构形式,伺服电机通过联轴器相当于直接带动旋转台,进一步缩小结构外形的同时,也提升了整个检测装置的转动精度,另外,通过对伺服电机的编程控制,可以实现旋转台灵活的启停控制和任意分度功能[4]。
三、选型及计算
(一)电机选型计算
因为本装置对精度要求较高,步进电机容易出现丢步现象,且在低速时易出现低频振动现象,本文设计额定检测速度1000个/min,一个旋转台4个工件,需要电机转速250r/min,所以选用伺服电机作为动力源。本文选用AC交流伺服电机,它优点是对速度、转矩和位置的控制精度很高。下面对此伺服电机进行选型计算:
已知旋转台质量M=3kg,直径R=120mm,旋转台最高转速250r/min,旋转台转动惯量为:

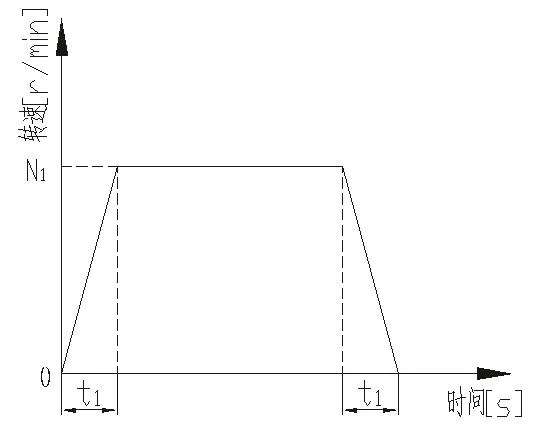
图3 转台转速曲线
根据转速曲线得出转台角加速度为:

本文工件质量小,转动惯量忽略不计。
由此得出转台加速过程所需转矩为:


根据转速、转矩需求,结合电机T-N曲线,选择伺服电机型号为ECMA-C10401AS,额定功率100W,额定扭矩0.32N·m,额定转速3000r/min,转子转动惯量0.037×10-4kg·m2。
(二)工业相机的选型
机器视觉系统的核心是图像的采集与处理。所有信息均来源于图像,图像的质量对整个视觉系统极为关键。工业相机的选型主要是镜头的选型,镜头的成像是以凸透镜的原理为基础,通过透镜的组合,把物体发出或者反射的光线成像在像平面上即图像传感器的像敏单元上,合理选择并安装光学镜头是保证清晰成像和获得正常图像信号的基础[5]。
由于图像传感器尺寸、拍摄目标距离和目标的大小均已确定,根据公式计算可选择合适的镜头焦距。当目标的像在CMOS芯片上占满时,计算公式为:
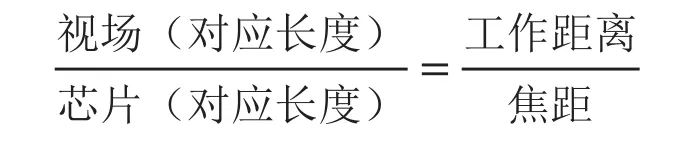
本装置的拍摄距离约110mm、CMOS图像传感器宽度和长度分别为3.6mm和4.8mm,拍摄范围是55mm×30mm,分别代入公式算得宽度和高度需要的焦距分别为7.2mm和9.6mm,因为镜头的焦距越小视场越大,为了保证宽度的足够视场,系统选用了焦距为7mm的M12规格板级镜头。
(三)光源的选型
在机器视觉领域,光源是图像采集性能稳定的重要保障,它直接影响着图像的质量和应用效果[6]。机器视觉常用的光源主要有:荧光灯、卤素灯、LED灯和激光光源等,LED灯与其它几种灯相比较,具有如下特点:
1.体积小、功耗低、寿命长;
2.成本较低,光强稳定;
3.高亮度,响应速度快;
4.可以使用LED阵列组成不同的形状。
基于本装置现场及LED灯的特点,采用白色LED灯作为本装置的照明光源。本装置对工件外观检测,需要从两个位置对工件的两个面进行图像采集,同时,从各光源的安装位置、各检测面检测的侧重点及不同光源的特性等方面考虑,本装置采用环形光源,环形光源相对其他光源体积较小,选择了高亮度的贴片LED, 并且设计成最大能通过800mA电流。为防止现场灰尘对光源的污染,选择了低折射率、高透光性的有机硅胶对其密封。
四、结语
本文设计了在高速运动情况下的产品外观检测装置,给出伺服电机和工业相机选型依据。样机检测速度可达1000个/min,误检率为0.01%,利用5G CPE 进行大量数据传输,上传云端服务器,在服务器自学习分析图像,再反馈给检测系统,检测效果进一步提高,在未来高速产线上具有很好的移植性,修改安装结构后在生产线上各个工位都能直接安装使用,从而减少设计研发周期,降低成本。
