基于多传感器的弹道射程解算模型
2020-11-05史卫泽吴军芳郭开心李晓峰
史卫泽,吴军芳,郭开心,李晓峰
(1. 北京理工大学机电学院,北京 100081;2. 国家知识产权局专利局专利审查协作河南中心,河南 郑州 450018;3. 北京新立机械有限责任公司,北京 100039)
0 引言
弹道修正引信在提高弹药命中精度的同时,能及时感知弹体状态,特别是对常规弹药兼容性良好[1],是弹道修正弹的重要发展方向。弹丸发射后,弹上系统开始工作并获取弹道特征参数,利用这些参数对弹丸实际飞行弹道进行实时解算,对比预先装定在引信中的射程信息,适时地启动阻力修正机构,对弹丸落点进行修正,从而达到弹道修正[2]。美国陆军研究机构从2000年开始持续研究基于地磁信息的弹丸姿态测试方法,在地磁测姿领域积累了丰富的经验[3]。文献[4]研究了一种基于单轴陀螺仪的姿态角提取方法;文献[5]设计了线圈式地磁传感器计转数引信,可有效获取弹丸转数信息;文献[6]在分析地磁场特点的基础上提出了利用磁阻式传感器感知弹丸转数的方法;文献[7]提出了加速度计/磁强计组合的弹道测量方法。本文针对中大口径榴弹在高转速弹载飞行条件下射程误差较大的问题,提出了基于多传感器的弹道射程解算模型。
1 弹丸弹道方程
为实现弹道射程解算,需要考虑弹丸的质心运动、绕心运动以及自转衰减的阻尼力矩影响。对弹丸进行受力分析,如图1所示,主要有重力G、空气动力R及其力矩MZ、MXZ等。
图1 弹丸受力分析Fig.1 Force analysis of projectile
中大口径榴弹射高在10 km以下,射程在50 km以下范围内,可将g做为常数计算,也可忽略柯氏惯性力的影响,此时弹丸飞行过程中的影响主要来自空气阻力[8]。
将质心运动矢量方程向弹道坐标系分解,同时将绕心运动矢量方程向弹轴坐标系投影,可得形式较简单的弹丸运动方程组。
1) 质心运动方程
由弹丸质心相对于惯性坐标系的运动服从质心运动定理,可得弹丸质心运动的运动学方程组,如式(1)所示:
(1)
2) 绕心运动方程
根据弹丸绕质心的转动可用动量矩定理,可得弹丸绕心运动的运动学方程组,如式(2)所示:

(2)
3) 弹丸弹道方程
忽略动不平衡产生的张量和动量矩、尾翼导转力矩、气动偏心产生的附加力矩和附加升力,结合坐标系变换公式、弹丸空气动力方程,可得弹丸的弹道方程,如式(3)所示:
(3)
综合式(1)—式(3)即可得到弹丸弹道全方程组,共包含15个变量,分别是:ν,θa,Ψ2,φa,φ2,δ1,δ2,ωξ,ωη,ωζ,γ,x,y,z,β。
由于靶场试验前无法获取真实弹道数据以实现对弹道射程解算模型的初步验证,基于上述弹丸弹道方程组,设计了弹道仿真模型,可通过仿真得到弹载地磁传感器和加速度计的理想信号。
根据炮射系统的有关特征数据和条件,如弹丸质量、弹径、弹型系数、火炮射角、初速以及气象条件等,完成了弹道仿真模型开发。基于Matlab+Simulink的弹道仿真模型如图2所示。

图2 弹道仿真模型Fig.2 Trajectory simulation model
2 弹道射程解算模型
基于多传感器的弹道射程解算模型采用地磁传感器和加速度计信息进行弹道射程解算,使用地磁传感器数据解算弹丸俯仰角信息与转数信息,使用加速度计数据解算弹丸运动时间。在靶场试验中,使用大量程过载加速度计设置阈值触发存储采样。建立了初速-射程模型,如图3所示。
图3 基于多传感器的弹道射程解算模型框图Fig.3 Trajectory range calculation model based on multiple sensors
2.1 姿态角解算
将试验当地地磁场信息的地理坐标系表达向地面固连坐标系投影,作为弹丸俯仰角计算的标准参考值,测量通过弹轴的地磁分量与参考值比对,可得地面固连坐标系下的俯仰角表达。地磁传感器安装位置和弹轴坐标系重合,俯仰角解算示意图如图4所示。

图4 俯仰角解算示意图Fig.4 Pitching angle solution schematic
对于设计合理的弹体,其飞行过程中的攻角较小,忽略不计。同时,令偏航角Ψ=0,可得俯仰角的解算结果,如式(4)所示:
(4)
将η定义为俯仰基准角,对俯仰角解算结果θ1、θ2进行取舍。在弹丸发射前将射角ρ装入系统,当ρ>η时,取较大者,当ρ<η时,取较小者。
2.2 初速修正
由于弹道射程解算模型中,弹丸实时速度的解算对初速的依赖性很大,故需要对规划初速进行修正,采用出炮口地磁传感器信息可进行初速的准确修正。
根据转数定距原理,利用缠度、转速和线速度的关系,可以得到修正后的弹丸初速v0,如式(5)所示:
(5)
式(5)中:η为火炮缠度;d为弹丸直径;转n圈的时间为t。
2.3 转动时间提取
根据上一章建立的弹道仿真模型,以初速524 m/s、初始射角15°和25°为例,提取弹丸飞行过程中的加速度数据与地磁场强度数据,如图5所示。
图5 传感器数据提取Fig.5 Sensor data extraction
从提取的加速度数据和地磁场强度数据可知,由于重力矢量和地磁场矢量不平行,提取的重力矢量和加速度矢量变化趋势不同,验证了通过地磁传感器和加速度计冗余测量弹丸旋转信息,保证了测量弹丸转一圈所需时间的可靠性。
2.4 角速度与速度的关系
由于在实际环境条件下,弹丸的角速度会衰减,基于转数的定距方法精度受到很大影响,必须进行修正。根据初速修正方法,可以得到较为精确的弹丸初始速度。在给定初速和射角的情况下,弹丸的旋转角速度与飞行速度之间存在着一定的规律性。
弹道仿真模型可以得到不同初始诸元下弹丸的弹道曲线以及飞行过程中弹丸的动态变化参数,提取仿真模型中弹丸的速度、角速度数据,通过对仿真的角速度和速度数据进行三次拟合,提出了两者之间的广义函数。当已知初始诸元后,代入不同的系数值就可以得到该初始条件下弹丸旋转角速度与飞行速度的关系。
选择弹丸初速510、600、700 m/s进行说明,得到给定初速和射角下两者的广义函数关系如下:
1) 初速510 m/s时
射角20°,ν=0.000 182 8ω3+0.239 5ω2-73.82ω+5 308;射角25°,ν=0.002 164ω3+0.601 7ω2+46.23ω+312.1;射角30°,ν=0.002 81ω3-0.864 3ω2+82.47ω-1 993;射角35°,ν=0.002 431ω3-0.705 8ω2+60.29ω+989.8;射角40°,ν=0.000 899 1ω3-0.731 6ω2-25.73ω+2 894;射角45°,ν=0.000 179 2ω3+0.234 6ω2-68.84ω+4 817。
2) 初速600 m/s时
射角20°,ν=0.001 5ω3+0.950 5ω2-183.662 7ω+11 525;射角25°,ν=0.000 092 8ω3+0.215 2ω2-64.053 1ω+5 021.6;射角30°,ν=0.000 0ω3+0.213 9ω2-62.672 0ω+4 866.4;射角35°,ν=0.000 0ω3+0.208 4ω2-60.662 8ω+4 678.8;射角40°,ν=0.000 808 7ω3-0.163 1ω2-3.840 9ω+1 771.3;射角45°,ν=0.000 432 2ω3+0.230 2ω2-32.998 9ω+1 771.3。
3) 初速700 m/s时
射角20°,ν=-0.001 3ω3+0.877 9ω2-184.241 9ω+12 634;射角25°,ν=-0.000 472ω3+0.415 3ω2-98.428 6ω+7 342.9;射角30°,ν=0.000 131 4ω3+0.847ω2-38.288 5ω+3 700.2;射角35°,ν=0.000 491 9ω3-0.108 6ω2-3.858 5ω+1 656.7;射角40°,ν=0.005 655ω3-0.1 448ω2+2.157 8ω+1 305.2;射角45°,ν=0.000 0ω3+0.156 1ω2-50.394 0ω+4 305.5。
选取初速510 m/s、初始射角20°为例,将拟合函数计算数据与弹道仿真模型仿真数据对比,结果如图6所示。由对比结果可知,拟合函数可近似表达出已知初始诸元下的弹丸旋转角速度与飞行速度之间的关系。
图6 拟合函数验证曲线Fig.6 Fitting function verification curve
2.5 射程解算
综合以上内容,结合初始诸元信息,即可得到弹丸射程,如图5所示。装定弹道诸元以及当地地磁场等初始信息;将弹道分解为n段,每一段近似为一条直线,实时计算每一段起始点的俯仰角θ0,θ1,…,θ2;同时,通过弹丸旋转角速度与飞行速度之间的关系,得到弹丸每一段的速度vi,选取时间步长Δt,可得弹丸在每一段T0,T1,…,T2的飞行距离li。根据每一段上述两个变量的值,可得在地面坐标系中的射程信息,如式(6)所示:
Li=li+1×cosθi+Li
(6)
式(6)中:Li为每一段弹丸对应的射程;li为弹丸每一段的飞行距离。积分即可得到弹丸射程L,图7为弹道射程解算原理图。
图7 弹道射程解算原理图Fig.7 Trajectory range calculation principle
在Matlab+Simulink环境下,建立了弹道射程解算模型,如图8所示。

图8 弹道射程解算模型Fig.8 Trajectory range calculation model
3 靶场试验验证
为获取真实弹道环境下传感器的数据输出,本文进行了靶场试验,完成了炮射环境下多传感器数据采集。靶场试验选取的研究对象为155 mm牵引式加榴炮杀伤爆破砂弹。
3.1 初始诸元信息
靶场试验初始诸元主要包括三部分:气象参数、弹道诸元参数以及弹丸形状参数部分初始诸元参考值如表1所示。
表1 靶场试验初始诸元Tab.1 Initial elements of the Artillery test
3.2 传感器炮射信息
通过靶场试验可得多传感器信息,包括地磁传感器各轴数据、加速度计各轴数据以及大量程过载加速度计数据。信号曲线如图9—图11所示。

图9 地磁传感器数据Fig.9 Geomagnetic sensor data
图10 加速度计数据Fig.10 Accelerometer data
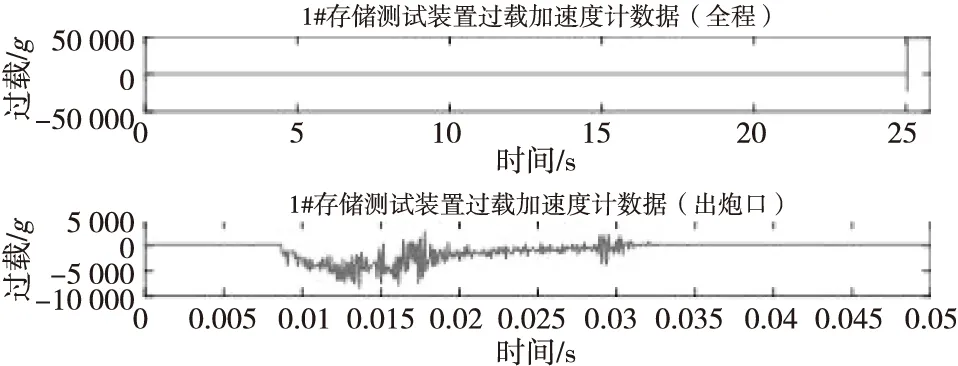
图11 大量程过载加速度计数据Fig.11 Wide-range overloading accelerometer data
得到传感器数据后,对数据进行分析处理,以地磁传感器X轴数据为例,可得其顶部滤波后结果如图12所示。
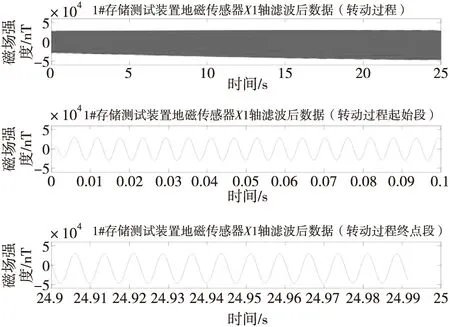
图12 地磁传感器X轴的滤波后数据Fig.12 Geomagnetic sensor filtered data of X axis
3.3 基于多传感器信息的射程解算结果
通过刚体弹道仿真模型、弹道射程解算模型与靶场试验分别得到了仿真射程、解算射程与实际弹道射程,如表2所示。通过试验结果可以看出,仿真射程、解算射程与实际射程之间误差均小于5 %。

表2 弹道射程对比Tab.2 Trajectory range contrast
通过对表2中的数据分析,可以看出仿真射程比解算射程误差较小,主要原因是在对弹丸运动规律进行理论分析和对弹道系数进行修正时,弹道射程解算模型对弹道仿真模型的依赖性较高。
4 结论
本文提出了基于地磁传感器和加速度计的弹道射程解算模型,建立了弹道仿真模型进行仿真验证,通过靶场试验得到多传感器信息进行了进一步验证,证明了该模型的完整性与可靠性。仿真实验和靶场试验结果表明,该射程解算模型误差较小、精度较高,具备一定的工程应用价值。
