断级与无断级滑行艇阻力性能的数值预报
2020-11-04吴本坤秦江涛贺伟
吴本坤,秦江涛,贺伟
(武汉理工大学 a.高性能船舶技术教育部重点实验室;b.交通学院,武汉 430063)
对高速滑行艇的水动力性能的分析传统主要依靠水池试验或经验公式方法[1]。传统方法中水池试验成本高且耗时较长,经验理论方法仅适用于简单的线性几何形状,对实际复杂滑行艇的水动力性能进行理论求解无法实现。相较于物理水池试验而言,数值水池拥有更为强大的流场捕捉能力[2]。在数值水池发展的初期,由于滑行艇在航行过程中姿态变化较大且伴有飞溅等强非线性现象[3],国内外学者对高速滑行艇的数值模拟常采用约束模的方法进行计算[4-5],与滑行艇在真实中的动态航行过程有较大出入。随着重叠网格技术的出现,使这类航态变化较大近船体流场较为复杂的船舶阻力与航态的预报得到了快速发展。文献[6]使用重叠网格技术预报高速滑行艇的阻力性能的网格影响因素,其中的网格划分建议对提高求解精度具有较好的指导意义。断级是设置在滑行艇的舯部来提高滑行效率的一种措施[7],由于断级的存在,使滑行面出现了不连续的现象,造成此处的流动现象较无断级滑行艇更为复杂。因此,为对断级滑行艇进行数值仿真,观察断级处特殊的流动现象,采用商业软件STAR CCM+的重叠网格技术对Taunton系列中的断级滑行艇C1与无断级滑行艇C在Fr▽=2.41~7.12间的阻力性能进行对比分析,验证数值方法的可行性,结合数值流场对断级的减阻机理进行探讨。
1 模型与方法
1.1 滑行艇模型简介
本文计算所采用的断级与无断级滑行艇的试验数据均来自南安普顿大学Taunton系列模型试验,试验在保证排水量与重心纵向位置一致的情况下对比断级滑行艇C1与无断级滑行艇C的水动力性能差别。艇型参数见表1,三维模型见图1。

表1 Taunton系列C与C1船型参数

图1 滑行艇三维模型
1.2 数值方法
通过对式(1)、式(2)进行数值求解以获得艇体周围流场分布。由于式(2)出现了未知的雷诺应力项,采用SST~kw两方程湍流模型封闭方程组。

(1)

(2)
计算中滑行艇运动姿态的求解采用重叠网格技术,通过求解2自由度平衡方程实现。采用VOF方法捕捉自由面形状的变化。
1.3 计算域及其边界条件的设置
数值流场计算域的形状取为长方体,由于船体关于中纵剖面对称,取半船体进行计算。由于滑行艇的速度较高,其兴波长度要比常规船大很多,为了能够充分捕捉尾流场的变化,同时也为了避免出口处产生回流,取计算域后端距船艉8倍船长,计算域前端距船艏1.5倍船长,计算域顶部距艇甲板1倍船长,底部距离船底2倍船长,侧部距离船侧为4倍船长。见图2。

图2 计算域尺寸设置
计算域边界条件的设置见图3,计算域前方、顶部、底部和右侧均为速度入口,左侧为对称平面,后方为压力出口,船体表面设置为壁面不可穿透条件。

图3 边界条件设置
1.4 离散网格
计算域内的网格形式主要包括切割体网格,多面体网格与棱柱层网格;滑行艇近壁流场采用棱柱层网格进行离散,并控制船体第一层网格节点高度以满足壁面函数法对y+值的要求;重叠域采用多面体网格进行离散,由于滑行艇高速滑行时,速度场与压力场均处于急速变化的状态,故在船体周围设置一个略小于重叠域的正六面体密度盒对船体周围网格进行加密以保证对船体周围的压力场与速度场的精确捕捉。背景域采用切割体网格进行离散,为了节省网格数量,提高求解效率,对自由表面采用各向异性网格来进行加密,水平方向采用开尔文波形形状的加密盒进行加密,并控制网格密度由近域到远域的均匀变化,波高方向采用扁平的正六面体密度盒进行加密,密度盒内在波高方向大致离散20个网格左右以满足对波高捕捉的要求。计算域网格分布的具体细节见图4。

图4 网格划分
2 数值结果
2.1 试验结果与数值结果对比
分别对断级滑行艇C1与无断级滑行艇C在Fr▽=2.41、3.69、4.81、5.99、7.12五个工况下进行船舶绕流场的数值模拟,两艇数值计算与试验对比结果分别见表2、3。

表2 无断级滑行艇C数值结果与试验值对比

表3 断级滑行艇C1数值结果与试验值对比
由表2无断级滑行艇C的阻力预报结果可以看出,随着航速的增大,阻力误差呈现逐渐增大的趋势,在最高航速下,误差达到5.64%,从航态预报情况来看,纵倾预报最大偏差产生在Fr▽=5.99时为0.23°,升沉最大偏差产生在Fr▽=4.81时为5.84 mm。对于阻力误差而言,结合文献[8-9]及试验现象与数值现象对比可知,当滑行艇处于高速滑行状态时,艇体与水体相互作用比较激烈,造成很大的飞溅阻力,由于VOF方法在当前的网格密度下并不能很好地捕捉到这类不连续的飞溅现象,故会造成在超高速滑行状态下的阻力误差较大的现象。图5为Fr▽=7.12时,常规单体滑行艇C模型的艇侧兴波与数值艇侧兴波对比,试验中艇侧有明显的白色片状飞溅现象,数值计算中并未体现。

图5 艇侧兴波试验与数值结果对比(Fr▽=7.12)
由表3可以看出,随着航速增大,阻力预报误差呈现出了随着航速的增加而增大的现象,其中在最大航速下误差为11.24%,造成相对误差较无断级滑行艇的误差较大的原因是由于断级前后2个滑行面与水流相互作用而产生的飞溅阻力比单个滑行面要大。
总体来说,使用重叠网格技术对滑行艇进行船舶绕流场的数值模拟具有一定的数值精度。
2.2 断级滑行艇与无断级滑行艇阻力性能比较
对比断级滑行艇C1与无断级滑行艇C的阻力性能见图6。

图6 断级与无断级滑行艇阻力性能对比
数值结果与试验结果均显示,在较低航速下,断级滑行艇C1阻力性能要略差于无断级滑行艇C,但随着航速的进一步增加,断级滑行艇的减阻效果随着速度的增加效果越发明显。由于数值误差的缘故,数值结果中减阻率在高航速下比试验结果的要大,在最高航速下,试验所测得的减阻率为26.6%,而数值结果所得出的减阻率为31.03%。
2.3 减阻机理分析
对于滑行艇来说,共有3个航行状态:排水航行状态、半滑行状态、滑行状态[10]。当滑行艇处于排水航行状态时,滑行艇同常规排水型船舶相同从船首至尾封板处形成封闭的排水体,此时尾封板处被水包围,支持艇重垂向力全部由静浮力提供。当航速进一步提高时,尾封板处的水体获得了足够的动能而得以脱离尾封板形成“空穴”,此时尾封板暴露在大气中,支持艇重的垂向力大部分由动升力提供。对于断级滑行艇而言,断级位置相当于首部滑行面的“尾封板”,尾部滑行面相当于滑行于首部滑行面的尾流中,由于断级后折角线垂向位置的升高,空气得以进入形成断级后空穴。两种滑行艇在Fr▽=5.99时中纵剖面处的水气分布见图7。
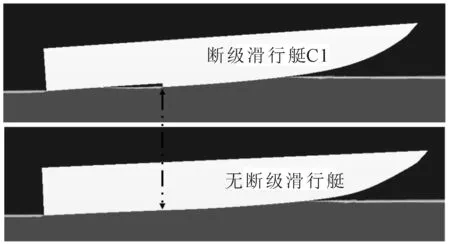
图7 断级滑行艇C1与无断级滑行艇C中纵剖面处的水气分布对比
可以看出,水流在断级位置(图中画线位置处)脱离,然后重新接触尾部滑行面。
由于断级后空穴的产生,艇体的浸湿面积会产生较大的改变,对水的体积分数进行积分即可得出艇体总的浸湿面积。两种滑行艇浸湿面积对比见图8。
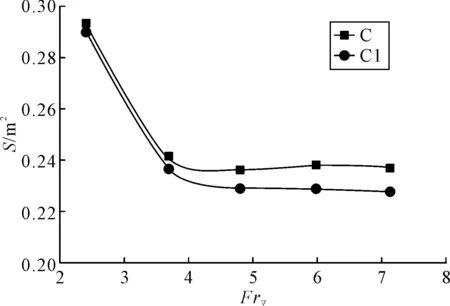
图8 断级C1与无断级C滑行艇浸湿面积对比
从图8可以看出,两艇浸湿面积均随着速度的提升而降低,但断级滑行艇的浸湿面积小于常规单体滑行艇从而减小了摩擦阻力,两艇摩擦阻力对比见图9。

图9 断级C1与无断级C滑行艇的摩擦阻力对比
2.4 不同速度下艇底浸湿区域对比
两艇底水气分布随速度变化对比见图10。

图10 不同速度下艇底浸湿区域的对比
图10中使用体积分数的分布进行不同速度下两艇浸湿区域的对比,标量尺中0与1代表完整的气相与水相,两者之间则处于水气混合状态。当Fr▽=4.81,5.99,7.12时无断级滑行艇的艏部驻点位置较断级滑行艇的驻点位置要靠前一些,结合试验与数值航态可知,由于断级滑行艇C1在静水滑行中的纵倾值大于无断级滑行艇C,故会缩短水线长度从而造成艏部驻点位置后移,这一数值流场现象与试验结果相吻合,一定程度上也反映了数值方法的可行性。并且随着速度提升,断级后通气量与空穴面积逐渐增大,空穴区域出现了少量的水气混合物。
3 结论
1)使用重叠网格技术对断级与无断级滑行艇进行阻力预报时,结合试验数据分析无断级滑行艇的预报精度要高于断级滑行艇。另外通过试验现象与数值现象的对比可知,对自由表面存在的飞溅现象,使用VOF方法捕捉存在一定的缺陷导致阻力预报的误差。
2)试验与数值模拟结果显示,断级滑行艇在高航速下阻力性能优于常规单体滑行艇,根本原因是断级后折角线垂向位置的抬升空气得以进入形成断级后“空穴”,减少了浸湿面积降低了摩擦阻力。并且随着航速的提升空穴面积也逐渐增加,减阻效果也愈加明显。