隧道路段预警作用下的时空集计通行能力分析
2020-11-03常鑫李海舰荣建赵晓华秦伶巧
常鑫 李海舰† 荣建 赵晓华 秦伶巧
(1.北京工业大学 北京市交通工程重点实验室,北京 100124;2.威斯康星大学麦迪逊分校 交通运行与安全实验室,美国 麦迪逊 53706)
隧道具有能缩短行车里程、提高线形标准、保护自然环境等优点,在高速公路建设过程中成为道路路线设计的重要组成部分。随着我国高速公路网络的逐步完善,隧道数量和里程快速增长,尤其是特长隧道建设得到了快速发展。由于高速公路隧道的封闭环境,一旦隧道内发生事故,则难以及时救援和疏导交通,火灾难以预防,发生二次事故的几率增加,造成事故严重性的风险增大,对于特长隧道尤甚[1-3]。事故数据统计研究表明,由于驾驶人因素造成的隧道交通事故占总数的95%[4]。而基于车路协同技术的主动交通安全管理为预防事故发生和改善驾驶行为提供了新的技术手段。
车路协同技术是近年来智能交通领域研究的热点和未来道路交通发展的方向,综合利用电子技术、通信技术、信息融合技术和人机交互技术等手段,可实现对道路环境的实时信息感知和V-X(车与车、车与路、车与人、车与交通设施以及车与交通管控中心等)之间的信息交互[5]。车载人机交互系统(HMI)是车路协同技术应用的重要载体,驾驶员通过HMI实时接收交通管理控制系统发布的出行动态信息服务,可以减少驾驶员反应时间[6],并及时反馈预警信息,从而有效减少二次事故的发生。同时,车路协同系统的普及应用可以有效地提升道路交通安全和通行效率,缓解交通拥堵、减少交通污染[7-9]。
隧道作为高速公路的瓶颈路段,尤其是特长隧道,因其物理结构的特殊性,驾驶员在进入和驶出隧道过程中驾驶环境发生剧烈变化,使其交通流存在较多的不稳定性。因此,隧道路段一直是高速公路交通安全研究的重点。Kinateder等[10]从隧道防撞设计角度研究了影响公路隧道内道路事故风险的人为因素;邱锋[11]在已有隧道事故统计分析相关性的基础上,确定了高速公路隧道交通事故预测的特征属性变量,进而构建了高速公路隧道交通事故预测模型;肖烽[12]依托高速公路隧道交通事故历史数据,分析了隧道交通事故基本特征,给出了隧道运营安全评价指标和评价方法。总体来看,目前有关隧道路段驾驶安全的研究主要集中于隧道交通安全工程设计、隧道环境对驾驶行为特性的影响、隧道安全事故数据的统计与预测等方面。而基于车路协同技术的预警系统对于驾驶行为的影响研究较少[13],对特长隧道路段的研究更少,且已有研究未考虑进入隧道前预警提示对控速行为的影响,缺乏结合车辆运行数据对驾驶行为和通行能力时空特征进行全面分析的相关研究。驾驶模拟实验是研究复杂交通环境条件对驾驶行为影响的重要技术手段,为道路交通安全设计与主动安全管理提供了重要参考[14];时空轨迹可以揭示运动物体在指定空间内连续时序变化状况的特性,准确地表述车辆行驶速度控制、速度稳定性以及进入隧道前减速触发点等方面的车辆时空运行特性[15]。鉴于此,本研究基于车路协同技术,借助驾驶模拟和移动终端设备(华为平板电脑),设计了面向特长隧道的主动安全管理预警系统,并开展了驾驶模拟实验,基于驾驶车辆的运动学特征(位置、时间、速度、加速度、横向摆动等)数据,研究了特长隧道路段环境下的车辆时空运行特性,对比驾驶员在预警系统开启与关闭2种状态下通过特长隧道路段(相同道路交通环境)车辆运行状态变化的差异性,并基于实验车辆的纵向时空轨迹汇聚数据,分析了预警系统对通行效率的影响。
1 隧道路段预警系统
1.1 实验环境搭建
车路协同仿真环境平台搭建方法参照Chang等[16-17]和Zhao等[18-19]的研究成果,以北京工业大学驾驶模拟平台为依托,结合外部终端设备和应用程序编程(API)接口实现多信息互联互通,同时通过内部可应用编程函数,对车路协同应用场景进行设计,从而搭建可实现多元信息交互的车路协同系统研究平台,满足高仿真度的车路协同驾驶场景的再造,技术框架如图1所示。
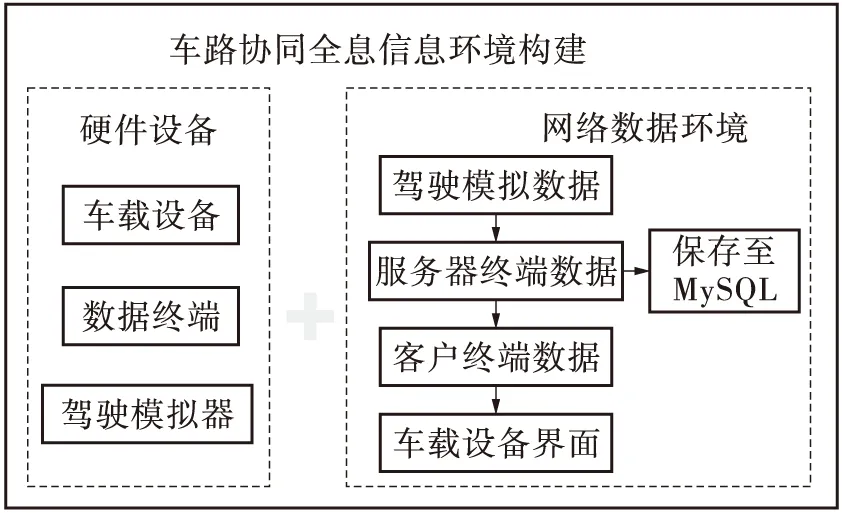
图1 车路协同研究平台技术框架[16]Fig.1 Architecture design diagram of the vehicle-road cooperative system[16]
车路协同驾驶模拟实验仿真平台示意图如图2所示。华为平板M5(10.8寸)作为车载设备(位置固定,不影响驾驶员视线)为驾驶员提供车路协同信息显示和播报;并通过模拟舱系统动态采集实验车辆的行驶时间、位置、速度、横向加速度、纵向加速度、横向摆动以及前后车间距等车辆运行状态信息,采样频率为20 Hz。模拟器可以采集实验车辆和周边车辆运行数据,利用平台设置的道路环境和交通参数,可以为实验车辆提供前方道路环境信息,模拟路侧设备与车辆间的信息传输,例如道路限速、前方路况信息等,同时借助无线网络环境(WIFI)传送至车载交互界面,以语音、文字或图片等形式为驾驶员提供辅助操作信息。
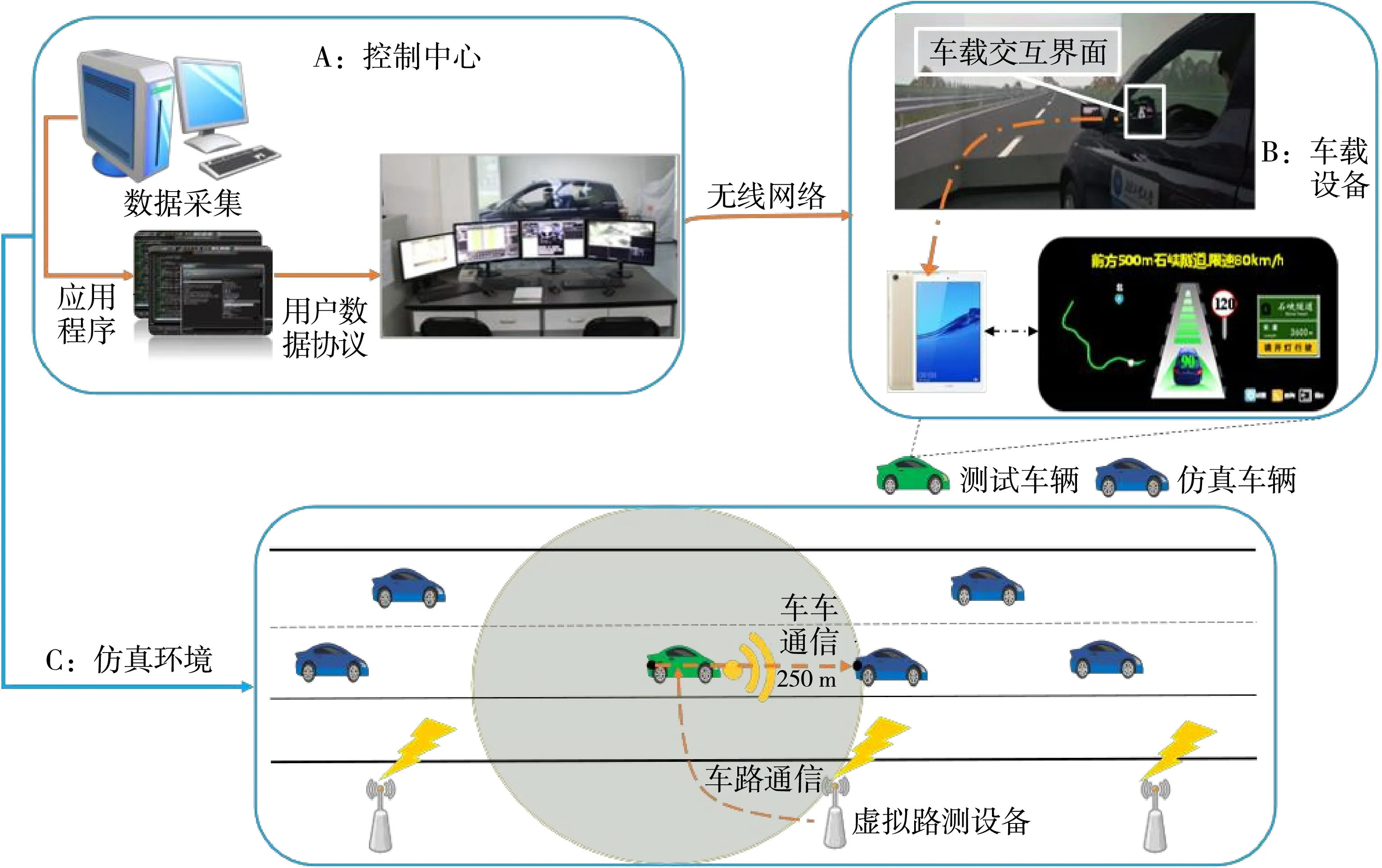
图2 车路协同模拟环境示意图Fig.2 Schematic diagram of vehicle-road cooperation simulation environment
1.2 预警系统设计
本研究参考中国汽车工程学会《合作式智能运输系统 车用通信系统 应用层及应用层数据交互标准》(T/CSAE 53—2017)中对车路协同应用的定义,对车载HMI的功能进行设计。本研究中,车路协同环境下,实验驾驶车辆具备超速预警、前向碰撞预警等基本功能。预警模式包括语音播报和车载交互界面文字显示,预警信息文字显示时间为3 s;当实验车辆没有触发任何预警时,车载设备界面显示为温馨提示语和生活服务类信息;当实验车辆触发超速预警,此时HMI显示有黄色或红色警告标志,同时,车载设备会发出语音信息提示。参考车载导航设备通用规范(GB/T 19392—2013)和Yao等[20]对导航信息提示设置的相关研究,一般车载信息提示为500 m间隔。本研究设计的特长隧道预警系统为两级预警触发机制:驾驶模拟车辆在隧道入口上游1 000 m和500 m位置处分别语音提醒驾驶员隧道入口的位置和隧道内限速,并在车内HMI界面显示对应的道路标志信息。面向特长隧道路段道路实验场景,车载HMI隧道预警设计分别在行车方向距离隧道入口1 000 m(见图3(a))、500 m(见图3(b))给予提示,同时语音播报文字内容,HMI显示如图3所示。

(a)隧道入口上游1 000 m位置提示
2 实验设计及数据收集
2.1 实验模拟路段
选取北京市典型高速公路作为场景模拟对象,车路协同系统状态(2种)作为控制因素,面向特长隧道应用场景,开展车联网信息对个体驾驶行为的影响研究。根据《公路隧道设计规范》(JTG D70—2004)中的规定,隧道长度在3 000 m以上的隧道属于特长隧道。借助AutoSimAS驾驶模拟舱系统,使用3 DMax软件搭建模拟道路实验环境,场景道路设置为双向4车道,横断面为22.4 m,每一个车道宽度为3.75 m,中间隔离绿化带宽度为2.6 m,路肩宽为4.55 m;隧道场景设计为双洞单向双车道特长隧道(隧道长度为3 600 m,隧道命名石峡隧道),隧道内限速80 km/h,普通高速路段限速120 km/h,实验场景中的交通标志标线设置符合国家标准GB 5768—2009。
2.2 驾驶人员招募
招募驾驶人40人,其中3人进行预实验,用于车路协同系统调试和实验方案的可行性验证。另37人中2人数据记录不完整,最终实验共获得35名驾驶人数据,基本信息见表1[21];驾驶员年龄分布在18~55周岁之间,驾龄在2~32年之间。本研究采用驾驶里程作为区分驾驶技能熟练程度,定义驾驶里程在30 000 km/年以上的为熟练驾驶员。按此原则,被试驾驶员中有14人为熟练驾驶员(职业代驾或出租车司机),23人为非熟练驾驶员。被试驾驶员身体和精神状态良好。同时,为减少其他因素对驾驶人造成影响,实验前驾驶员均未有饮用酒、咖啡等刺激性饮品以及服用药物的情况。
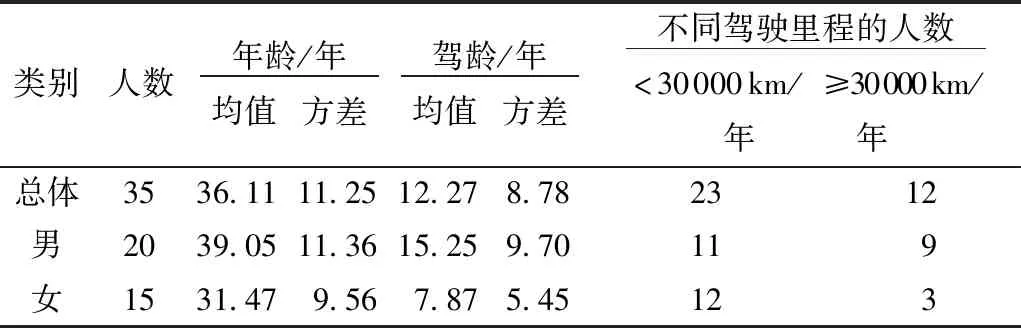
表1 实验驾驶员信息Table 1 Information of drivers
2.3 驾驶模拟实验过程
实验过程共2种实验场景(有预警信息提示和无预警信息提示),每个场景的行驶线路相同。为避免驾驶人因熟悉驾驶路线而影响实验结果,实验分2次进行(间隔至少1天),被试驾驶员每次随机驾驶1种场景。每次驾驶过程为:
(1)预驾驶:驾驶员在非实验场景中驾驶5 min,以适应模拟车辆操作和模拟驾驶环境。
(2)驾驶前培训:工作人员为被试驾驶员进行车载设备的产品说明,同时告知驾驶员相关注意事项,如行驶道路等级、仪器佩戴注意事项以及在实验过程中出现事故后的处理办法等。
(3)正式实验:告知被试驾驶员每次的行驶目的地,然后开始实验,模拟仓系统开始采集数据,工作人员记录实验过程。
(4)模拟驾驶结束:实验结束后,工作人员询问被试驾驶员场景的仿真度。
实验道路基础路径如图4所示,包括以下几个路段:①A—B,0.5 km的实验起始路段(双向4车道,限速80 km/h);②B—C,1.0 km的实验过渡路段(双向2车道,限速40 km/h);③C—G,6.6 km双向4车道高速公路正式实验路段,其中隧道区E—F间路段限速80 km/h,其他路段限速120 km/h。

图4 实验路径Fig.4 Experimental route
2.4 数据处理
本研究重点分析车路协同系统提供的网联信息对隧道路段车辆时空运行特征的影响。同时,针对高速公路典型应用场景特长隧道路段预警系统的效果进行深入分析。因此,根据预警信息提示位置,本研究的数据处理及分析主要关注隧道预警第1次提示前500 m至隧道结束后500 m区间的车辆运行特征,即图4所示D—G路段区间(总长5 600 m)。为了能够更好地反映个体驾驶员时空图特性以及个体间的差异,本研究的指标选取包括:时空图曲率、速度、速度变异系数、加速度、急减速次数、隧道路段超速程度等6个指标。
时空图曲率反映了车辆时空轨迹的变化拐点,本研究重点分析车辆进入隧道前路段减速触发点的位置。基于实验获得的时空离散点数据,由Matlab拟合出曲线,进而计算时空图曲率;速度表征的是车辆的运行快慢情况,由系统直接输出;速度变异系数Cv可反映车辆时空运行的稳定性,计算方法如式(1)所示;加速度反映的是车辆的加减速情况,受道路限速影响,车辆时空运行特征越平稳,越接近0;急减速次数反映的是驾驶员的车辆操作水平,针对典型特长隧道场景(危险工况),本研究主要考虑车辆减速行为,参考文献[22]和文献[23],定义急减速次数为减速度峰值小于-3m/s2的个数;隧道超速程度可反映车辆运行的控速状况和预警提示效果,本研究考虑用车辆超速的空间分布占比和超过限速的比例2个子指标对此做出评估。
(1)

同时,为了反映有、无车路协同情况下,个体车辆时空运行特性集计效果对通行能力的影响,本研究基于最小安全跟车时距原则下实验车辆时空轨迹汇聚的最佳模式,分别获得两种实验条件下道路断面的最佳通行效率,并对车路协同系统对于运行效率的提升效果进行了评估。
3 隧道路段预警系统
实验获得特长隧道路段35位实验驾驶员两次实验的车辆运行数据,通过对时空图曲率、速度、速度变异系数、加速度、急减速次数、隧道路段超速程度等6个指标进行计算,分析特长隧道路段35位驾驶员两次实验条件下的车辆时空运行特征。
3.1 时空图特征分析
两种状态下的车辆总体时空特征如图5所示,为了更直观地描述车载设备开启对车辆运行时空特征的影响,本研究基于曲率的计算方法和数据移动平均降噪的方法,利用Matlab获得两种车载设备状态下的时空图曲率变化如图6所示。图中:HMI-OFF表示车载设备关闭;HMI-ON表示车载设备开启;Warning 1000表示隧道入口前1000 m预警提示点;Warning 500表示隧道入口前500 m预警提示点;Begin表示隧道入口位置;End表示隧道出口位置;下同。
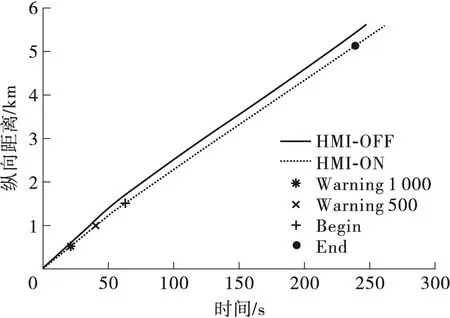
图5 时空轨迹图Fig.5 Spatiotemporal diagram
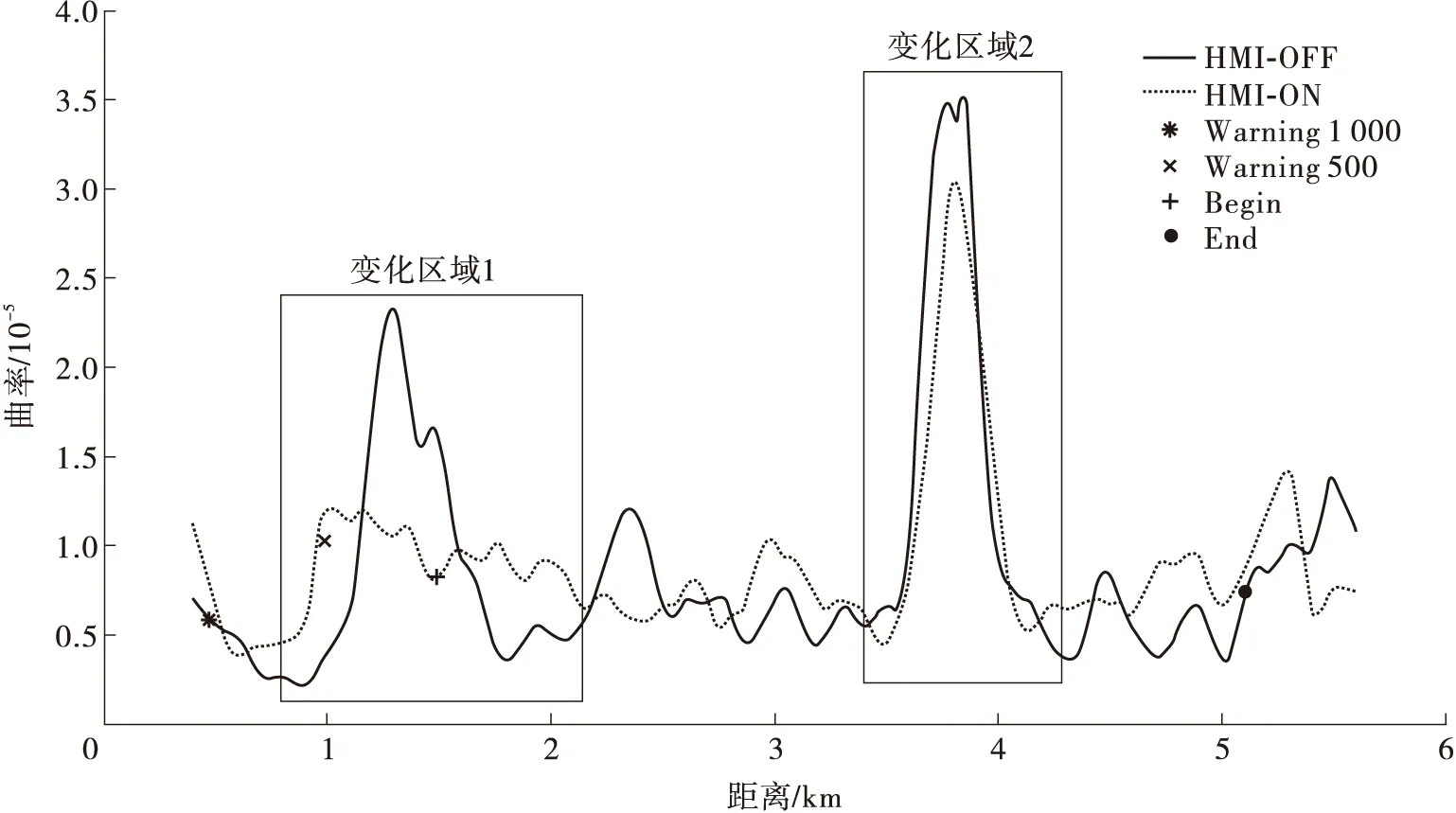
图6 时空图曲率Fig.6 Curvature of spatiotemporal diagram
为了更好地说明车载设备对时空运行稳定性的影响,根据数据结果,本研究定义时空图曲率曲线出现波峰位置,且峰值大于1.510-5的为曲率拐点位置;从图6可以看出,时空轨迹图明显变化拐点出现在变化区域1和变化区域2。区域1出现拐点是因为高速公路隧道路段限速80 km/h,驾驶员在进入隧道前进行速度调整。车载设备关闭时,驾驶员调整车速仅仅依靠来自路侧标志牌或隧道入口标志性建造物等的视觉刺激反应调整车辆速度。由于速度限制以及安全的考虑,驾驶员在短时间内调整车辆速度,车辆时空轨迹出现如图6中区域1中的曲率峰值。车载系统开启时,系统在进入隧道前1 000 m和500 m位置通过HMI给驾驶员提示隧道入口位置和限速,此时驾驶员有充足的时间调整车速。在区域2出现明显拐点是因为:实验设置当驾驶员行驶在隧道内位置3 800 m时,前方模拟车辆由80 km/h突然减速至60 km/h,维持60 km/h行驶5 s,然后继续以80 km/h行驶,前车驾驶状态的突然变化引起跟驰实验车辆做出相应的调整。通过对时空轨迹拐点的位置和数量进行分析发现,车载设备开启时,时空轨迹的拐点数量和变化程度都要明显少于车载设备关闭时的状态,区域1和区域2的拐点统计见表2。
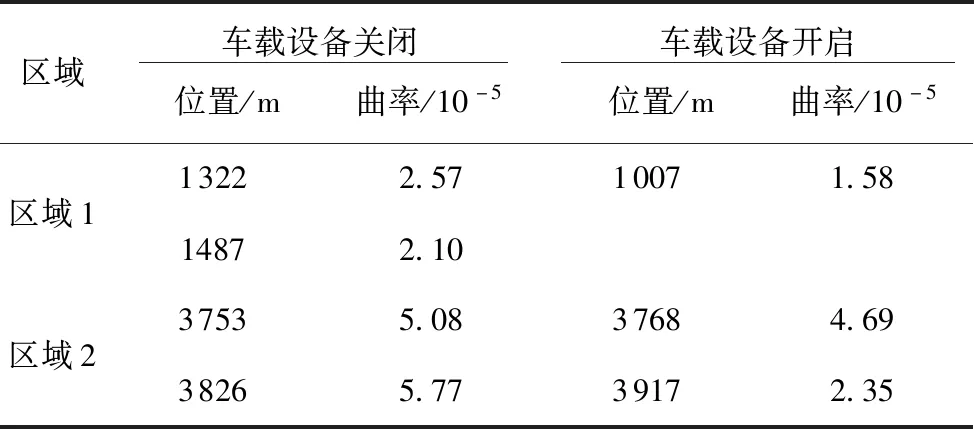
表2 曲率图峰值点Table 2 Peak points of curvature diagram
从表2可以看出,车载系统开启时,车辆运行状态调整明显提前(位置1 007 m),且车辆时空轨迹变化更加平缓,这从侧面也反映了驾驶员驾驶操作的自信和从容。结果同时表明,车载HMI使得驾驶员从传统基于视觉的刺激反应行为转换为基于心理预期的主动应对行为,车辆运行更容易形成平稳速度。
3.2 运行速度特征
本研究对在车载设备开启和关闭两种状态下的数据进行了正态性和方差齐性检验,数据结果满足上述两种假设检验。然后对35位驾驶员在车载设备两种状态下的驾驶行为数据显著性进行分析,分析结果如图7所示,实验车辆的整体运行特征统计结果见表3。
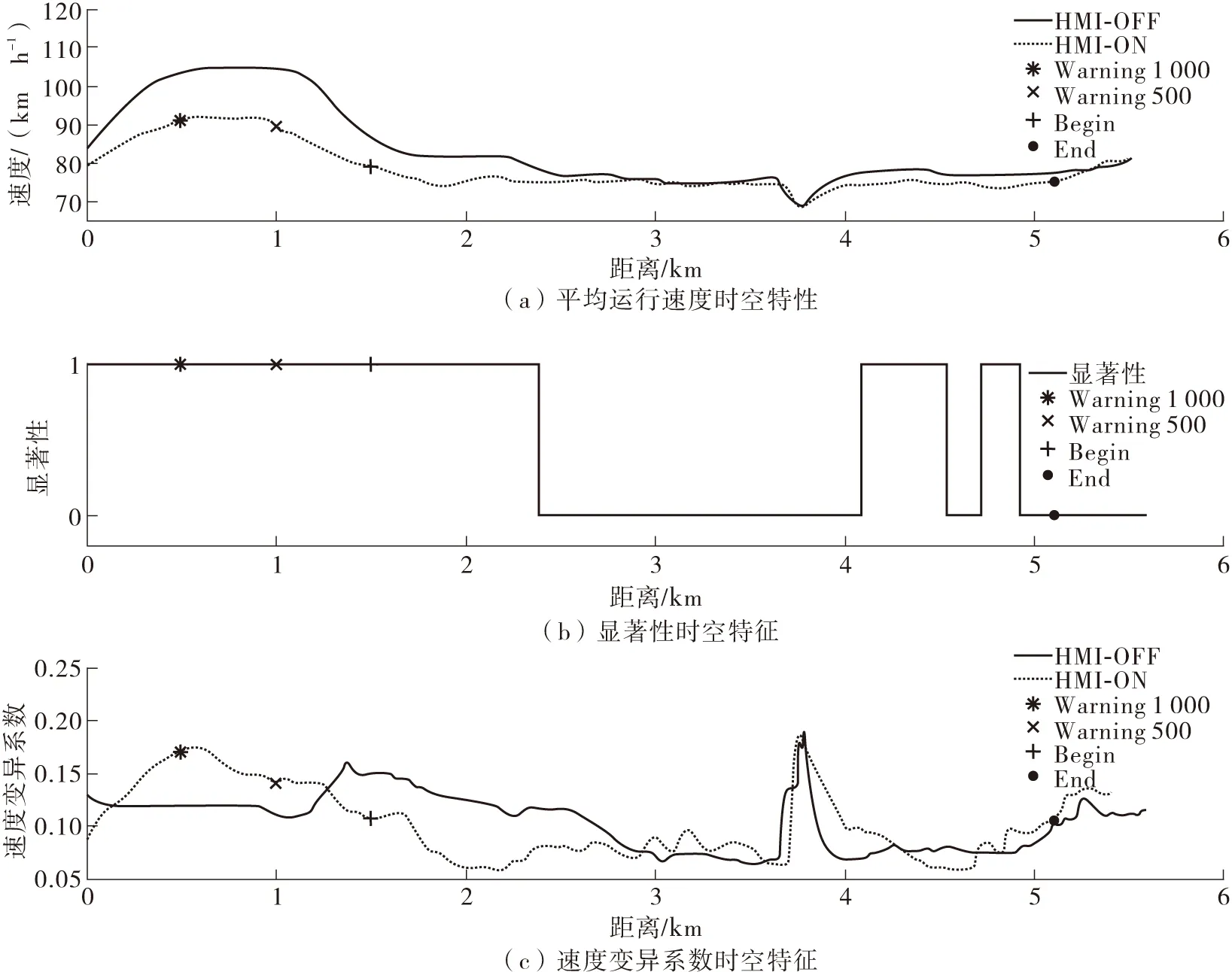
显著性为1,表示两种车载状态下车辆运行特征有显著性差异;显著性为0,表示两种车载状态下车辆运行特征没有显著性差异图7 车辆运行时空特征分析Fig.7 Spatiotemporal characteristics of vehicle operation

表3 车辆整体运行特征1)Table 3 Overall characteristic of vehicles
从图7(a)可以看出,车载设备开启时,驾驶员更加谨慎,速度平均比车载设备关闭时低。从表3可知,车载设备开启和关闭两种状态下行驶在特长隧道路段的车辆运行特征有显著性差异。结合图7(b)可以看出,这种差异在特长隧道前、隧道入口附近以及隧道出口附近差异更加显著。由图7(c)可知:距离0~1 300 m区间段的速度变异系数在车载设备开启时比较大,但在隧道入口前200 m及隧道内的速度都比较稳定;原因为,由于车载设备的预警信息作用,驾驶员在进入隧道前进行积极的控速行为,以使得车辆在进入隧道后能够保持稳定速度行驶。相较车载系统关闭状态,在特长隧道入口附近的速度稳定性更加明显,表明车辆在该路段行驶安全系数更高。从表3统计的整体运行特征值比较可知,车载设备开启时,车辆运行的速度标准差较低,这也表明了该车载状态下车辆行驶更加稳定。另外,车辆的急减速次数和车辆行驶在隧道内的超速程度都明显降低,说明车载设备开启有助于驾驶员更好地了解外部驾驶环境和车辆的运行状态。
4 通行效率分析
4.1 时空轨迹汇聚方法
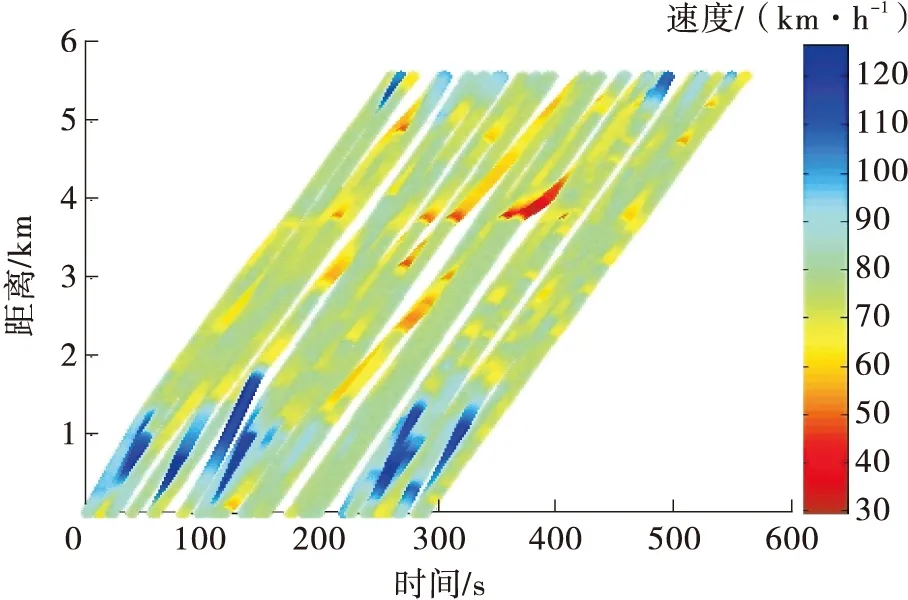
基于驾驶模拟实验获得了35位驾驶员的车辆时空特征数据,为探讨车路协同环境对宏观交通流的影响,本研究提出了基于时空轨迹汇聚模式的通行效率进行分析的方法:将车载系统开启和关闭两种状态下的35条时空轨迹曲线按照最小跟车时距(htmin)的原则进行随机排序(即前后两位驾驶员时空轨迹的纵向时距大于htmin)。研究利用Matlab仿真实验方法,随机排序1 000次,并获得对应车载状态下每个断面(间隔1 m)的车头时距值总和最小时对应的时空轨迹汇聚最佳模式的排序。有无车载设备两种状态下最佳时空轨迹汇聚模式如图8所示。
从图8可以看出,在实验交通流状态下,车载系统开启时,35位驾驶员的时空轨迹汇聚图更加紧密,速度整体比较稳定,有利于交通流整体通行效率的提高。为更加直观地反映车路协同系统对交通流影响效果,本研究计算分析了最佳汇聚模式下每一个采样点断面的车头时距分布。
4.2 通行效率的影响
参考文献[24]对车头时距的研究,本研究假定前后车辆间的跟车最小车头时距为1.5 s,基于车辆的纵向时空轨迹汇聚数据,可获得最佳时空轨迹汇聚模式下每一个采样点断面的平均车头时距分布,由HCM 2016推荐的通行能力计算方法可知断面通行效率C为[25]:
(a)车载设备开启时的时空轨迹汇聚图
(2)

由式(2)可得最佳时空轨迹汇聚模式下每个断面的实际通行能力,两种车载设备状态的实际通行能力空间分布情况如图9(a)所示,车载设备开启时对应的通行能力提升效果如图9(b)所示。
由图9(a)可知,最佳时空轨迹汇聚模式下,车载设备开启后的通行效率明显提高,从空间分布上看,交通流通行效率越接近隧道出入口附近越低,这是因为车辆在进入和离开隧道时,由于道路速度限制和驾驶舒适性原因,驾驶员积极调整车速,引起运行速度波动,交通流运行稳定性降低。对实验路段通行能力分析可知,车载设备开启时,研究路段断面实际通行能力最小为429 veh/(ln·h),车载设备关闭时,断面实际通行能力最小为354 veh/(ln·h)。
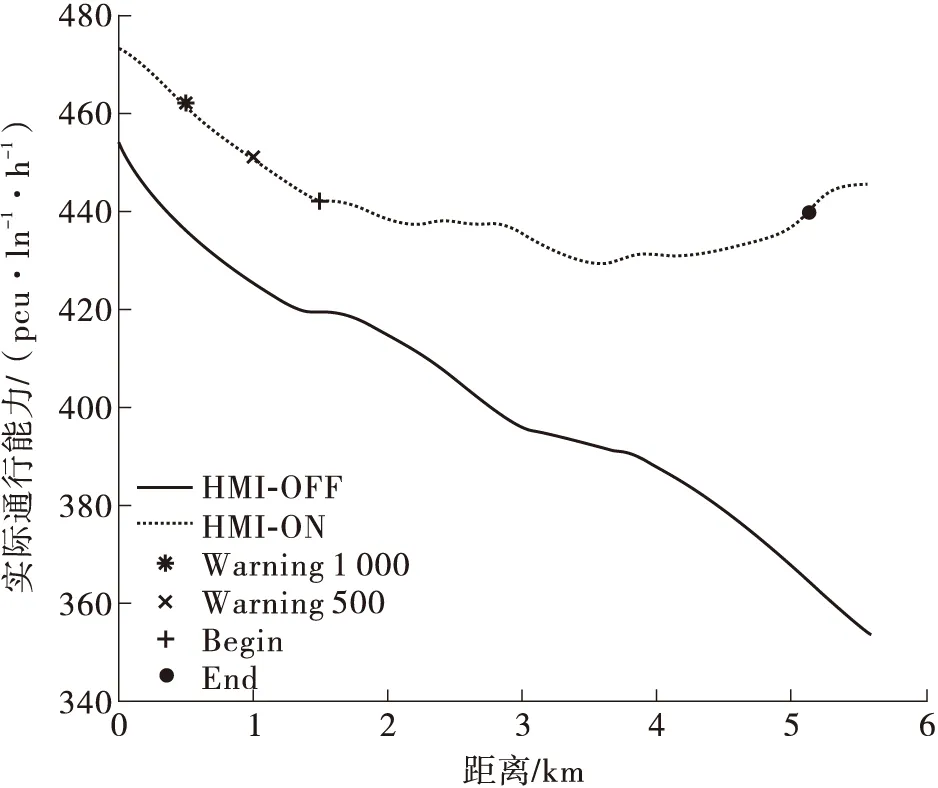
(a)通行能力空间分布
从图9(b)可以看出,车载设备开启对于隧道场景的提升效果在隧道内尤为明显,在最小车头时距设定为1.5 s假定前提下,车载设备开启时特长隧道场景实验路段的通行效率整体平均可提升21.27%。由此可知,车载系统提供的信息服务,可以给予驾驶员更充分的准备,使其更早地进行速度调整,从而减少急刹或急加速情况的出现,使得车辆速度波动较小,交通流运行状态更加顺畅。
5 结论
(1)面向特长隧道路段主动安全管理,提出了车路协同条件下车载设备对个体驾驶行为影响的评价方法。研究结果表明,车载系统开启时,驾驶员在进入隧道前会进行更加积极的速度调整,在即将进入隧道和隧道内路段车辆行驶相比系统关闭状态更加平稳。此外,车载系统开启时,车辆出现的急减速次数、车辆超速空间及超过限速的比例都大大下降,表明车路协同系统使得驾驶员从传统基于视觉的刺激反应行为转换为基于心理预期的主动应对行为,车辆运行更容易形成稳定速度。
(2)本研究提出了基于最佳时空轨迹汇聚模式的通行效率分析方法,建立了从个体驾驶行为到宏观交通流通行能力时空特性分析的一般方法;由分析结果可知,假定满足最小跟车间距及断面车头时距值总和最小前提下,车载系统开启后,实验路段通行效率整体平均可提升21.27%。
与自然驾驶实验相比,驾驶模拟在外部因素控制、驾驶风险和数据的精细化分析等方面具有一定的优势。然而,驾驶模拟环境和自然驾驶环境还是存在一定的差异性的,为了进一步验证车路协同条件下车载设备的应用效果,后期将开展外场实验进行进一步研究。后续研究也可结合车载系统设计对驾驶行为的影响进行研究,包括预警提示的位置、HMI信息提示内容等方面。此外,还可对车路协同环境下跟驰模型参数标定和宏观交通流演化规律进行研究。
