地铁钢轨感应正火作业车的研制
2020-11-02刘晓磊李贤元赵洪洋张志强
刘晓磊 周 涛 李贤元 赵洪洋 张志强
(1.中车戚墅堰机车车辆工艺研究所有限公司 江苏 常州 213011;2.中铁十一局集团第三工程有限公司 湖北 十堰 442012)
目前现场施工中钢轨焊后正火热处理大多采用火焰正火,优点是投入成本小、操作简便,但缺点是火焰正火加热不均匀且受到多种因素的影响,尤其是在地铁隧道施工,存在很大的安全隐患。钢轨电感应正火由于加热速度快且均匀,实现了正火自动控制且安全风险小,但缺点是成本一次性投入大。现有钢轨感应正火作业车均采用集装箱式结构,放置于无动力装置的铁路平板车上通过轨道车牵引,需要配置专业的轨道车司机,另外在地铁隧道施工时轨道车柴油机和正火车柴油机同时工作,尾气排放大、噪音高。
本文研制了一款可低速自走行的钢轨感应正火作业车,满足地铁的小曲线半径、大坡道的线路要求,同时设计有在线监控系统,实时在线监控设备状态并可远程进行数据管理。
1 正火作业车总体简介
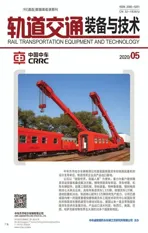
地铁自行式钢轨感应正火作业车,采用自走行平板车上载集装箱舱体结构形式,主要由自行式平板车和集装箱正火机组组成,其中集装箱正火机组由集装箱舱体、正火机、电气控制柜、起重机、柴油发电机组、喷风装置等组成(见图1)。
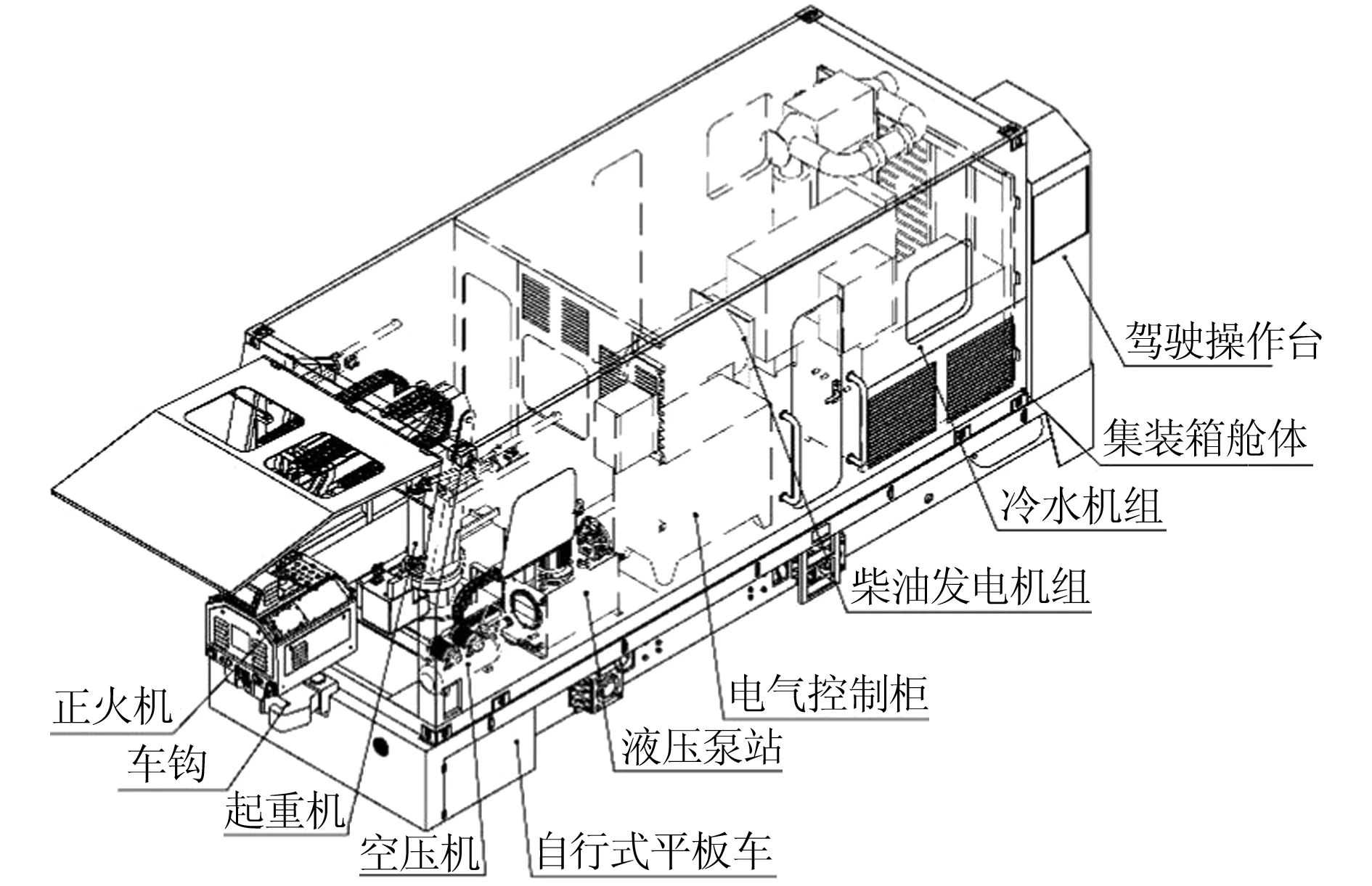
图1 地铁自行式钢轨感应正火车简图
自行式平板车运行至待正火工位,电气控制系统接收正火机操作信号,按设定的工艺向正火机各个执行器发出控制信号,通过温度传感器等采集正火数据,实施反馈控制,正火管理系统对正火数据实时采集、管理并自动判断正火结果,记录正火过程中的温度、时间、频率等正火数据。液压系统为正火机、起重机等提供液压动力,冷却系统提供循环的冷却水,防止感应线圈、变压器、中频电源等部件过热损坏。空气压缩机对钢轨表面进行迅速喷风,恢复钢轨表面硬度。原理框图如图2所示。
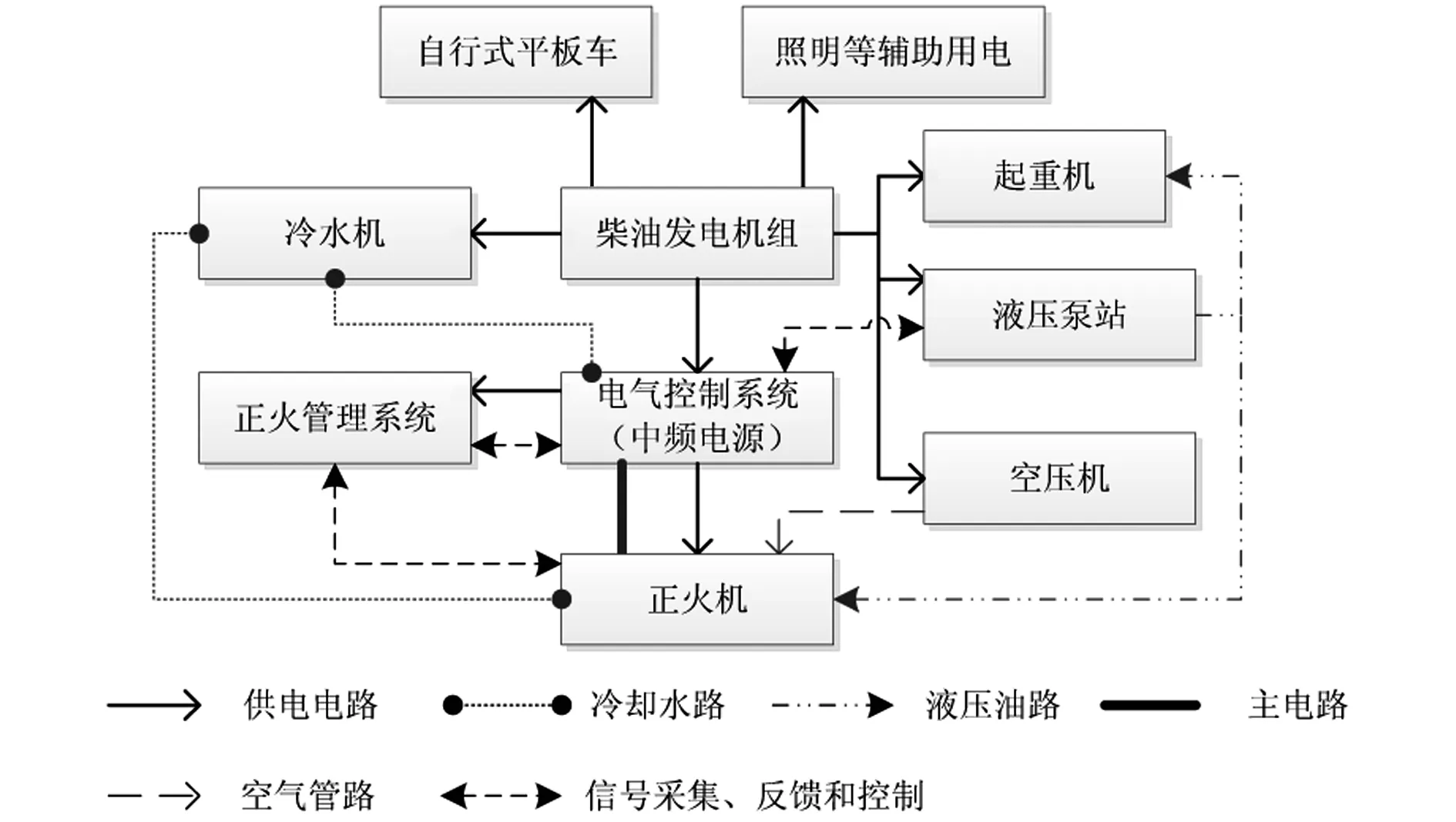
图2 原理框图
2 集装箱正火机组
2.1 起重机滑移装置设计
采用二级伸缩回转单臂起重机起吊正火机完成正火机的收放,由于受到集装箱翻转门的宽度和集装箱侧壁的限制,作业半径受到限制,为了增大作业半径,将起重机整体滑移至舱体前端,如图3所示,起重机滑移装置由平移油缸、底座、轴承、导槽等组成,其中轴承分为2组,每组4个,分别负责底座在导槽上水平方向和垂直方向的滚动和定位。
图3 起重机整体滑移装置
滑移底座承受起重机、正火机的重力以及悬挂正火机的弯矩,滑移底座受力如图4所示。
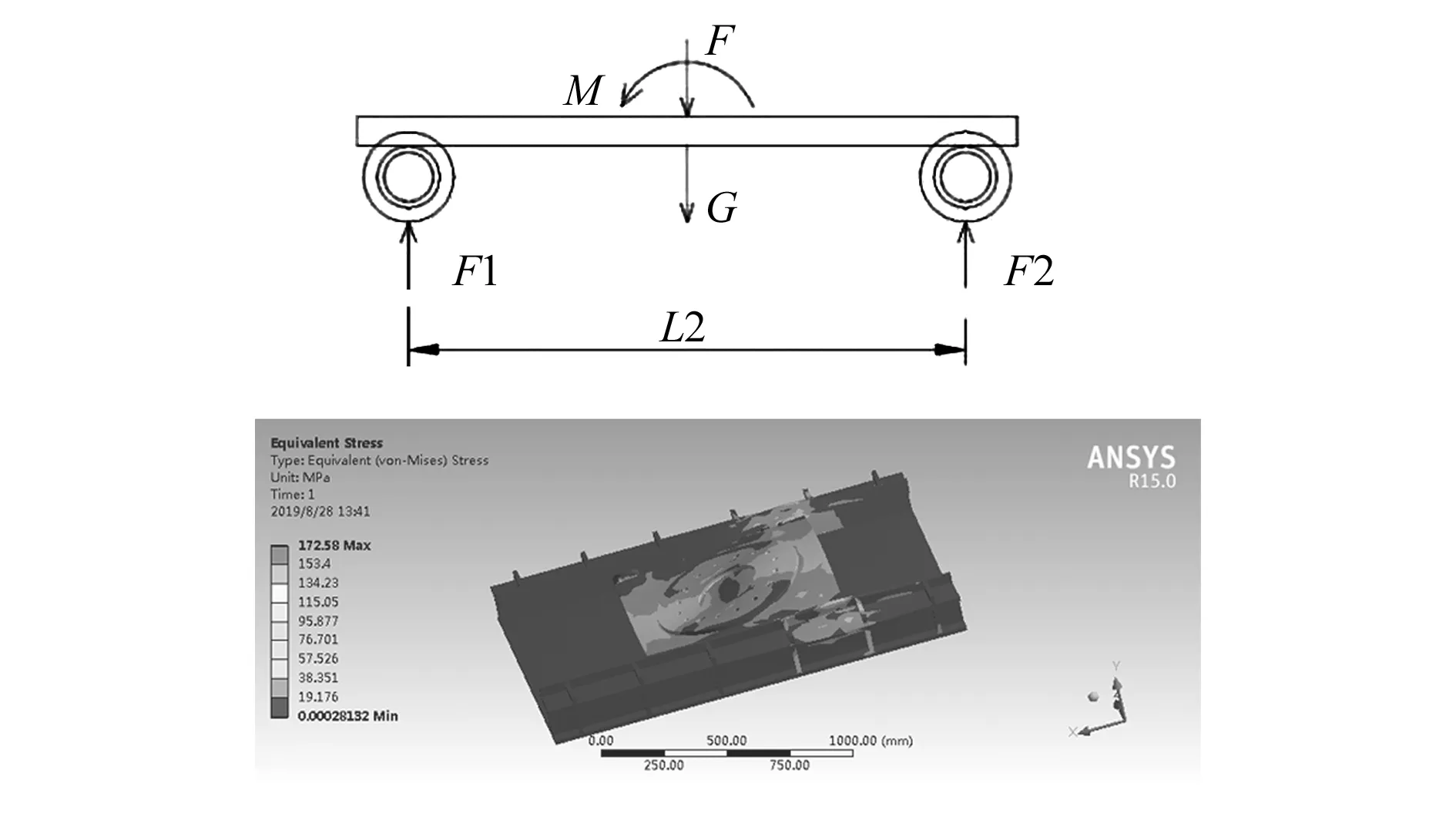
图4 滑移底座受力分析图
其中,F为起重机和正火机的重力,为30 kN;当起重机伸至最大行程时,对滑移底座的弯矩最大,M=72 kN·m,通过力的平衡计算,前端单个轴承承受的最大压力为27.2 kN,选择安全系数为3,最终选择NUP2212E的圆柱滚子轴承。
2.2 前端门翻转机构设计
正火机的作业端部采用翻转门结构,通过油缸和连杆机构实现翻转门的启闭(见图5),翻转门打开后,起重机将正火机吊运至工作位,起重机作业空间高度H1≥2 450 mm,限界高度H2≤2 700 mm。
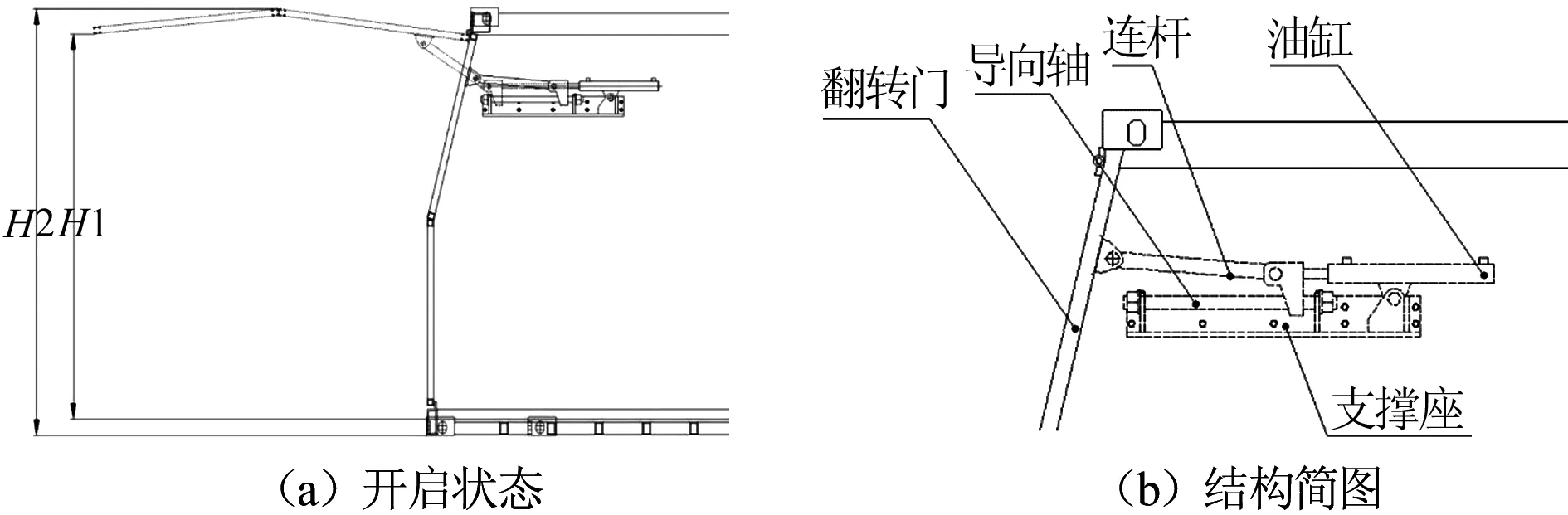
图5 前端门翻转机构
翻转门的质量为250 kg,通过计算,液压油缸缸径为50 mm,杆径为35 mm,行程为2 300 mm,压力为17 MPa。翻转门与舱体之间通过3个铰链实现连接,随着翻转门的开启,铰链受力逐渐增大,完全开启时铰链受力最大为12.66 kN(见图6)。
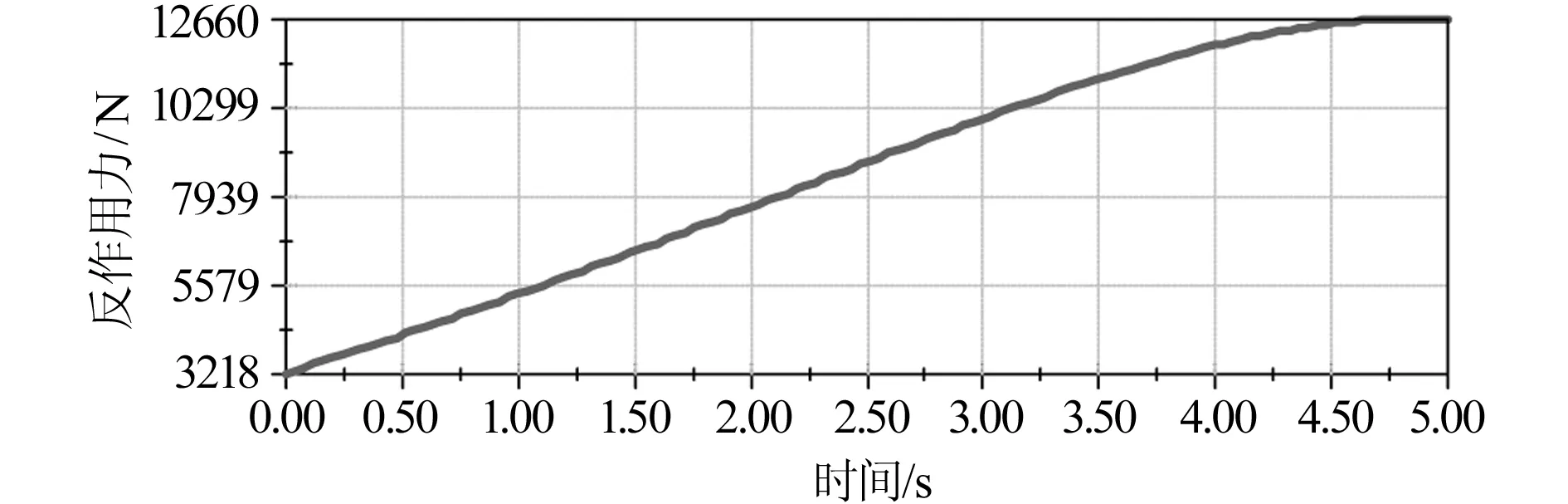
图6 铰链受力变化
2.3 正火机
正火机(见图7)是钢轨感应正火的工作装置,采用钳形的夹紧定位结构形式[1],通过夹钳钢的伸缩运动带动夹钳臂完成夹钳的夹紧、松开动作,实现对钢轨的夹紧和对位,从而实现感应线圈定位。
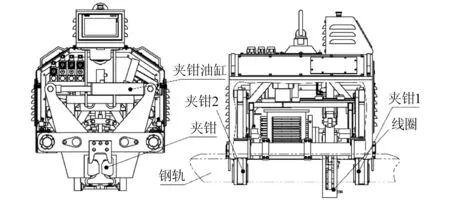
图7 正火机结构示意图
夹钳施加在钢轨的夹紧力为100 kN,避免了受热应力对焊缝的影响。
3 自行式平板车
自行式平板车用于承载集装箱正火机组,采用变频电机控制平板车速度,动力来自集装箱正火机组的发电机组,可实现10 km/h速度自走行。自走行平板车上部设置有操作台,为了方便双向行驶和瞭望,在正火作业端设置有瞭望摄像头,集成在正火舱体上,其余走行平板车各设备均设置在车架下部,包括走行轮对、牵引电机、齿轮箱、空压机、单元制动器等(见图8)。
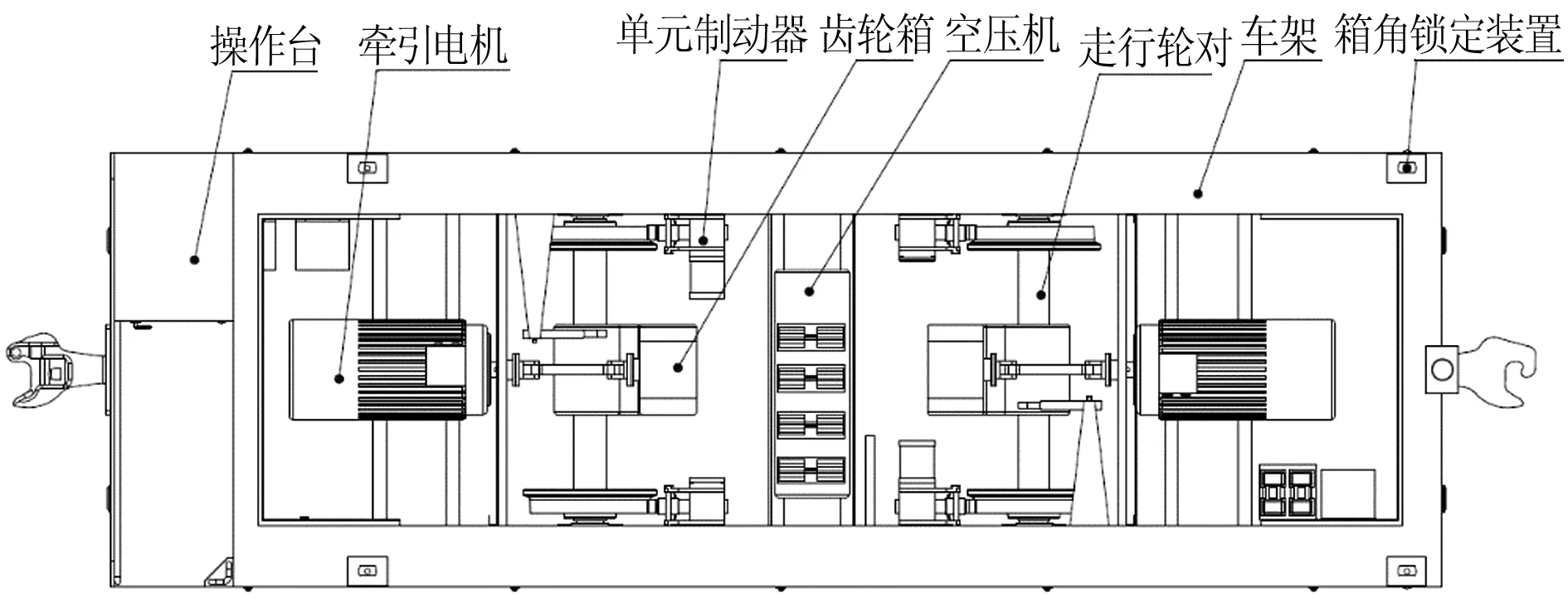
图8 自走行平板车简图
车体为框架式结构,采用钢板与型材组合而成,导框座及基础制动支架铆焊于车架两侧板上,减震采用板弹簧,制动闸缸安装于车架面板上。操作台上装有手动调速装置、JZ-7小阀、电气开关、仪表等装置。技术参数如表1所示。
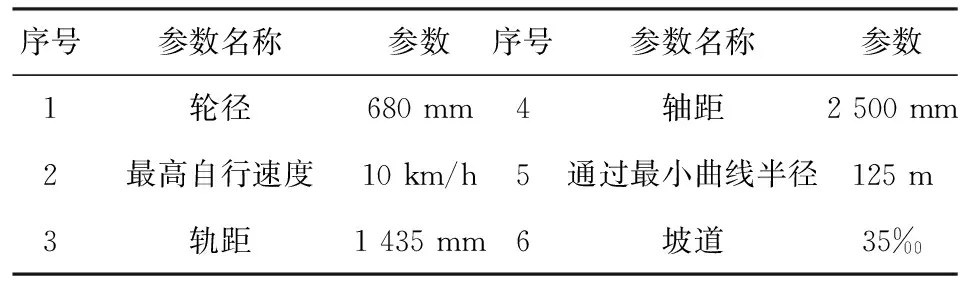
表1 技术参数
3.1 牵引传动
采用2个变频电机牵引,电机固定安装在平板车下部架构上,用万向轴与齿轮箱连接,提供动力输入,驱动平板车走行。动力传递路线为:发电机→变频器→变频电机→万向轴→车轴齿轮箱→轮对。
自行式平板车轴列式为0-2-0,轴重12.5 t,经计算,选用额定功率为45 kW、额定转速为590 r/min、额定转矩为728 N·m的变频电机,车轴齿轮箱传动比i=5.29,满足设计要求。
3.2 制动
制动系统应满足35‰坡道制动和停放的要求,制动机选择JZ-7小阀,停车主动选择单元制动器停放制动方式,闸瓦间隙可调整。经计算,制动倍率为3.8、速度为10 km/h时的紧急制动距离为15.7 m,满足35‰坡道上制动和停放;但当其中一套单元制动器停放失效时,在35‰坡道时会溜车,建议当其中一套单元制动器失效时,停放的坡道不应大于17‰。
4 在线监控系统
在线监控系统是利用监控的数据让设备“开口说话”,使得用户对设备运行状态、正火数据和报表、故障信息等关键信息全面掌握,便于设备的使用和维护保养。
在线监控系统采用分布式总线架构[2],监控系统各个部件进行集中管理。在线监控系统由上位机监控系统、网关、各部件电气系统、GPS等组成,如图9所示。各部件电气系统和GPS通过485总线和网关进行通讯,电气控制系统通过MPI总线与网关进行通讯,监控系统在网关中进行数据的实时读取,并予以显示。

图9 在线监控系统框架
在线监控系统由5个子菜单构成,分别对冷水机、液压泵站、柴油发电机、车辆定位和故障报警组成。在主界面点击“进入设备监控系统”即可进入。
5 应用情况
地铁钢轨感应正火机应用于上海地铁15号线鞍钢U75V、60 kg/m钢轨的正火作业(见图10),晶粒度、硬度等符合TB/T 1632——2014的要求。

图10 正火机的现场应用
截至2020年3月,已完成超过1 000个焊接接头的正火作业,经现场应用表明,地铁钢轨感应正火作业车正火质量稳定,效率高,满足现场长轨作业施工要求。