全自动两臂锚杆钻车负载敏感系统仿真*
2020-11-02贺安民郭治富
贺安民,郭治富
(1.国家能源集团 神东煤炭有限公司, 陕西 榆林 719315; 2.中国煤炭科工集团 太原研究院有限公司, 山西 太原 030006)
0 引言
根据神东矿区创建世界一流矿井的总体规划要求,国家能源集团神东煤炭公司提出了全自动两臂锚杆钻车的概念,以实现降低工作强度、提高锚杆支护质量与支护效率、减少锚护人员、巷道快速掘进的目标,并为锚杆钻车向智能化、无人化发展做技术铺垫。全自动锚杆钻车在煤矿井下巷道工作时,需要实现自主行走、自主确定钻孔位置、自动锚护、排间距控制等功能。为了实现自由转向及空间定位轨迹平滑连续精确控制,全自动锚杆钻车动力系统采用了电液比例负载敏感控制系统,液压原理如图1所示。
负载敏感系统具有效率高、使用成本低等特点,已在工程机械、矿山机械中得到了广泛应用。但负载敏感系统的控制特性复杂,早期研究人员常用试验方法研究其压力流量特性。

图1 全自动两臂锚杆钻车液压原理
随着计算机仿真技术的发展,学术界逐渐开展了负载敏感系统的建模与计算机仿真研究。文献[1]基于AMESim对全液压坑道钻机负载敏感系统进行了仿真建模,验证了自动上杆装置的性能。文献[2]建立了构成负载敏感系统的主要元件——负载敏感变量泵、负载敏感多路阀、管道、执行机构和负载的数学模型,并通过试验研究了管道及变量泵可调参数对负载敏感系统静动态特性的影响。文献[3]分析推导了负载敏感系统的数学模型,并用AMESim软件进行了仿真研究。文献[4]研究了锚杆钻车负载敏感系统主要参数的辨识与计算方法。文献[5]利用功率键合图实现了对负载敏感系统的仿真试验。文献[6]使用SimulationX软件对液压挖掘机负载敏感系统及其元件进行了建模和仿真。
本文针对全自动两臂锚杆钻车负载敏感系统建模与仿真问题,基于流量连续性方程和力平衡方程研究了负载敏感系统动力学建模问题,并用仿真软件验证了模型的稳定性与可靠性。
1 负载敏感系统动力学模型及其稳态方程
1.1 负载敏感系统动力学模型
负载敏感变量泵原理图如图1所示。具体参数如下:Ps为变量泵出口压力;PLS为负载压力;PM为变量缸无杆腔压力;R1为阻尼孔R1的流量系数;R2为阻尼孔R2的流量系数;APs为敏感阀泵出口压力腔面积;xLS为敏感阀的阀芯位移;xM为变量缸位移;AM1为变量缸无杆腔面积;AM2为变量缸有杆腔面积;KM为变量缸弹簧的刚度;BM为变量缸黏性系数;QS为变量泵输出流量;V为变量泵最大排量,xMAX为变量缸最大行程。

图2 负载敏感变量泵原理
负载敏感阀流量连续性方程:
(1)

(2)
负载敏感阀力平衡方程:
(3)
变量缸力平衡方程:
(4)
假设变量泵出口流量(规定流出为正)与变量活塞位移之间的关系可表述为:
(5)
1.2 负载敏感系统各工况稳态方程
1.2.1 低压卸荷工况稳态方程
由图1可知,在低压卸荷工况稳态时需满足的方程如下。
泵流量连续性方程:
(6)
式中:xM0为变量缸低压卸荷时位移;PM0为变量缸低压卸荷时无杆腔压力;dR2为变量缸阻尼孔直径。
负载敏感阀流量连续性方程:
(7)
式中:xLS0为负载敏感阀芯低压卸荷时阀芯位移;PS0为负载敏感系统低压卸荷时系统压力。
负载敏感阀芯受力平衡方程:
APs·Ps0=KLS·xLS0+2 200 000·ALS
(8)
变量缸活塞受力平衡方程:
(9)
1.2.2 高压卸荷工况稳态方程
由图1可知,在高压卸荷工况稳态时需满足的方程如下。
泵流量连续性方程:
(10)
式中:xMH为变量缸高压卸荷时位移;PMH为变量缸高压卸荷时无杆腔压力。
高压卸荷阀流量连续性方程:
(11)
式中:xHD为高压卸荷阀阀芯位移;PSH为负载敏感系统高压卸荷时系统压力。
高压卸荷阀芯力平衡方程:
AHD·PSH=KHD·xHD+28 000 000×AHD
(12)
变量缸受力平衡方程:
(13)
1.2.3 负载敏感工况稳态方程
由图1可知,在负载敏感工况稳态时需满足的方程如下。
泵流量连续性方程:
(14)
式中:ALOAD为负载所需流量对应阀开口面积;PL为负载液压压力。
负载敏感阀流量连续性方程:
(15)
负载敏感阀芯受力平衡方程:
APs·PS=KLS·xLS+2 200 000·ALS
(16)
变量缸活塞受力平衡方程:
(17)
2 负载敏感系统仿真验证
为验证全自动两臂锚杆钻车负载敏感系统动力学模型的准确性和稳定性,用仿真软件搭建模型进行了仿真验证。设定流量为180 L/min。给定四通阀输入信号如图3所示。0~1.0 s为低压卸荷状态,四通阀不工作;1.0~3.3 s为负载敏感工况,四通阀打开;3.3~5.0 s为高压卸荷工况,四通阀打开,但无流量通过,负载敏感泵高压卸荷。该输入信号控制滑阀在0.5 s内从中位切换到工作位。
图4和图5分别为变量泵出口流量曲线和压力曲线。由图4和图5可知:当四通阀从零位切换到工作位后,变量泵可以稳定地从低压卸荷状态切换到负载敏感状态,流量、压力曲线超调很小;当负载油缸到终点时,进入高压卸荷状态。
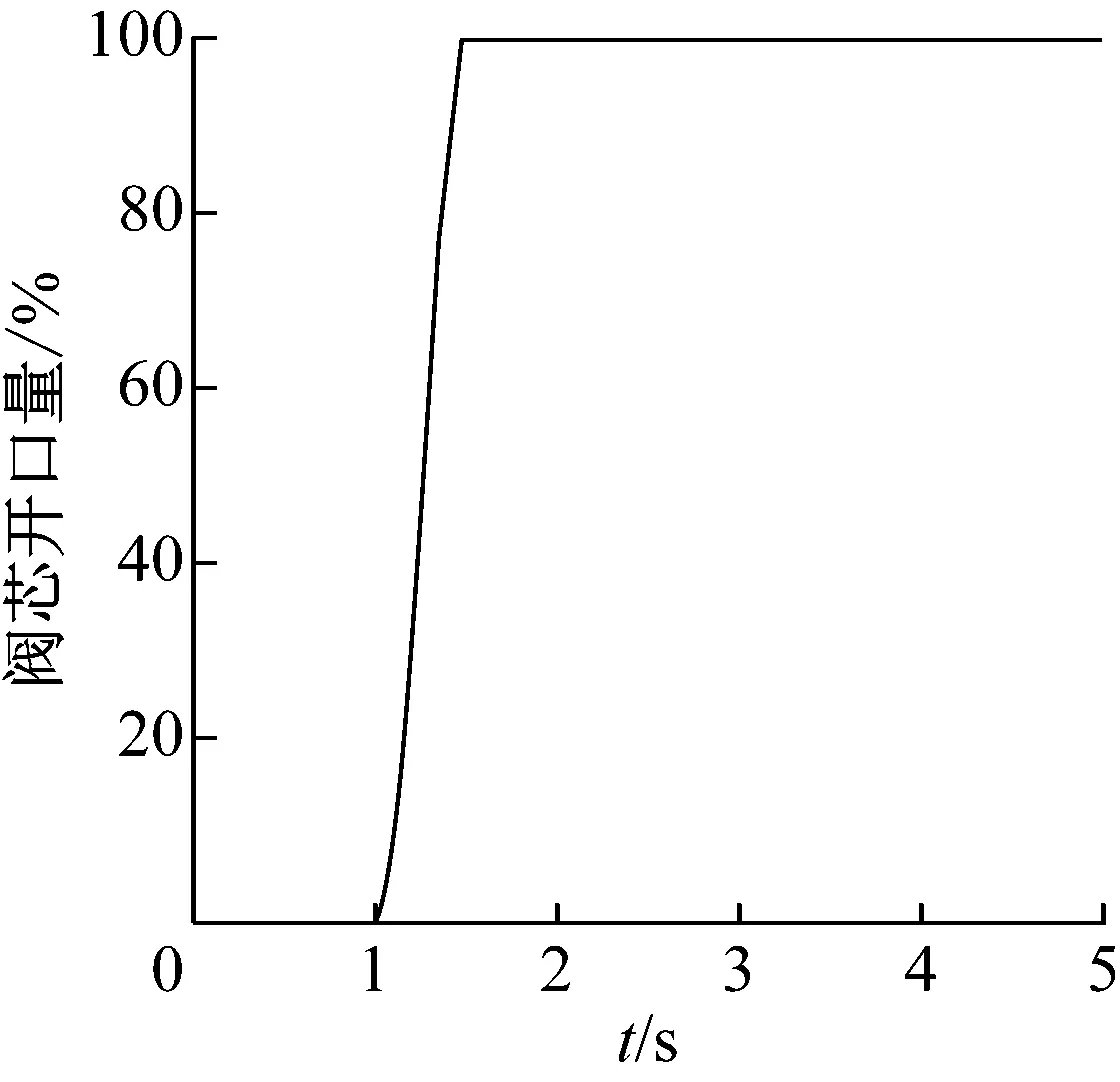
图3 多路阀模块输入信号

图4 变量泵出口流量
图6为负载敏感阀芯位移曲线。由图6可知:当负载敏感系统在低压卸荷、负载敏感和高压卸荷工况连续切换时,负载敏感阀芯在0.30 cm、0.22 cm和0 cm(阀芯全开)之间连续运动,并能达到稳态平衡位置。
图7为高压卸荷阀阀芯位移曲线。由图7可知:高压卸荷阀在低压卸荷和负载敏感工况下不工作;当系统压力达到高压卸荷压力设定值280 bar时,阀芯动作并稳定在0.58 cm处。
图8为变量缸位移曲线。由图8可知:当负载敏感系统在低压卸荷、负载敏感和高压卸荷工况连续切换时,变量缸在2.1 cm、0.7 cm和2.0 cm之间连续切换并能达到稳态位置。
3 结论
本文基于流量连续性方程和力平衡方程,研究了全自动两臂锚杆钻车负载敏感系统的动力学方程建模和低压卸荷、高压卸荷、负载敏感3种工况的稳态方程建立,并用仿真软件对模型进行了仿真验证。仿真结果表明,仿真模型可完全模拟负载敏感系统多种工况,并能在各工况下使系统各元件达到稳态。该仿真模型具有较好的稳定性和可靠性。
