旋转导向钻井工具姿态参数的DSP 数据采集系统设计
2020-11-02张旭亮阮岩
张旭亮,阮岩
(1.西安石油大学,西安710065;2.陕西省油气井测控技术重点实验室,西安710065)
0 引言
随着传感检测技术、微电子技术和数字信号处理技术等与石油勘探开发相关技术的不断进步,旋转导向钻井技术在近几十年来也得到快速的发展。旋转导向钻井技术是一项高水平的自动化智能化闭环导向钻井技术[1],具有井眼轨迹实时控制精准、位移延展能力强、井下安全系数高和井眼净化效果好等诸多优点,适用于复杂大位移水平井、长水平段水平井以及三维多目标井、特殊油藏、深海钻井、垂直深井等[2],并且能够有效提高油气采收率和高难度特殊油藏的勘探开发能力,同时在开发过程中可减少钻井平台的数量,节省人力和物力的投入,降低深海石油勘探开发成本。实时精准地对钻井工具姿态参数进行测量至关重要,是实现旋转导向钻井工具导向精准控制的关键因素之一[3]。井下闭环控制系统需要根据导向钻井工具在井下的姿态参数进行反馈控制,以实现井眼轨迹的动态稳定,确保井眼准确钻入设计靶区。
近些年国内一些研究机构和高校不断将数据采集技术应用在石油测井领域,推动了数据采集技术在石油领域的发展。中国石油集团测井有限公司设计了基于CPLD 控制的随钻测井数据采集系统,通过硬件实现了连续的实时数据采集和实时数据处理;中海油服油田技术研究院设计了一种基于DSP 和FPGA 的数据采集处理电路,该电路可实现复杂声波信号的采集、滤波、编解码等功能,并可在井下高温环境下稳定工作;清华大学以SoC FPGA 和AD7609 模数转换器作为核心,搭建了一种用于石油声波测井的多通道采集系统,该系统可以实现声波模拟信号的采集存储以及数字滤波、压缩打包等处理,并可通过CAN 总线将数据传送至地面控制系统[4]。
1 系统主要电路设计
可靠稳定的硬件平台是保证系统功能和性能的基础,结合钻井工具姿态测量理论,考虑到系统对主控芯片数据运算处理能力、功耗和算法移植性等因素,选用浮点型DSP 芯片TMS320F28335 作为核心控制器,同时根据系统设计需求以及控制芯片结构、资源和性能特点设计了系统整体结构,介绍系统硬件基础外围电路以及功能电路的设计方案。
1.1 系统整体结构
以TMS320F28335 为系统设计核心,外设硬件设计主要包括信号调理电路、时钟电路、ADC 校正电路、电源电路、复位电路、显示电路以及通讯接口。钻具姿态信号通过传感器采集后,经过信号调理电路,将调理后的信号和两路校正电压信号送入ADC,转化为DSP可处理的数字信号,并进行数字滤波、ADC 误差校正和位置误差校正,最后解算姿态角度并实时显示。系统结构图如图1 所示。

图1 系统结构图
1.2 TTMMSS332200F2288333355基础外围电路设计
(1)TMS320F28335 处理器
根据系统设计需求分析后,选用TMS320F28335这款DSP 芯片作为核心控制器,该芯片主频最高可达150MHz,并且采用哈佛结构总线形式,程序与数据空间相互独立,能够根据设计需求,通过修改.cmd 文件来分配两个空间所占用的内存,以减轻程序访问运行时的瓶颈[5]。TMS320F28335 片内集成32 位高性能FPU(浮点运算单元),能够提高应用复杂工控算法时的运算速度与精度,并且拥有SPI、SCI、CAN 等标准通讯接口,适用于各种工业现场应用需求。具有88 个多功能复用引脚,便于外设扩展。片内集成12 位ADC 模块,拥有16 个采样通道,可进行同步或顺序采样转换,转换结果可通过DMA 方式进行传输[6]。其还拥有外部存储器接口 XINTF,可以实现 SRAM、Flash、ADC 等模块的扩展。
(2)时钟电路设计
考虑到系统需要稳定、精准的时钟信号,并且为了让TMS320F28335 工作在150MHz 主频时,锁相环控制寄存器配置方便、降低因采用高频晶振而增加电路设计的复杂度,最终选择30MHz 外部振荡器芯片HXO-36B。外部振荡器(有源晶振)输出一般为方波信号易产生谐波干扰,在其输出端串上一个电阻,该电阻与电容构成RC 积分平滑电路,将方波转换为近似正弦波,本设计阻值为选用33 欧姆的电阻。在外部振荡器的输出端串联上一个电阻,也可以减少反射波,避免反射波叠加引起。在外部振荡器电源输入端加上磁珠以抑制电源噪声。对时钟电路进行布线时,应尽量让时钟线长度短,靠近芯片,并且最好在一面,避免使用过孔,以减少信号干扰。时钟电路如图2 所示。

图2 时钟电路图
(3)电源电路设计
根据本系统工作特性与性能要求,最终选择TPS767D301 低压差线性稳压电源芯片为主控制器TMS320F28335 提供所需电源,该芯片可输出两路电压,一路为3.3V,另一路可调,范围为1.5~5.5V,输出电流最高为1A,并且具有高温自动关闭功能,当监测到工作温度异常时,会立即断电,防止因温度过高而烧坏芯片。本系统DSP 的供电电路如图3 所示。通过计算选择合适的阻值,可输出1.9V 供电电压,电源芯片TPS767D301 的5V 电压输入由实验室自制的超低纹波直流专用测试电源提供,在PCB 硬件电路板进行设计的过程中,应将电源芯片如何快速散热这个问题考虑在内。
芯片在工作时,需要频繁使用电源,将会导致开关效应,引入开关噪声,同时电源中也存在纹波干扰,因此本系统在芯片的每个电源引脚设计了由大电容和小电容组成的去耦滤波电路,能降低电源的噪声干扰和纹波。其中3.3V 电源去耦电容电路如图4 所示。

图3 DSP供电电路设计
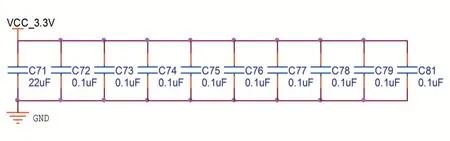
图4 3.3V电源去耦电容电路设计
与一般的MCU 不同,TMS320F28335 涉及数字和模拟两个电路,为了避免数字电路产生的噪声干扰模拟电路,在进行供电电源设计时,采取数字和模拟两个电源分别为对应电路供电的形式[7],示意图如图5所示。
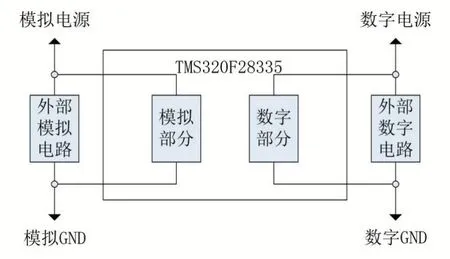
图5 电源分割示意图
(4)JTAG 接口电路设计
TMS320F28335 集成JTAG 标准测试访问接口,结合仿真器和CCS 仿真软件可实现TMS320F28335 片内寄存器和存储空间的直接访问,方便开发人员进行实时的系统软件调试、程序代码修改、实验仿真测试,使得整个系统研发过程更为简便直观。
本系统采用TDS510 仿真器,选择2.2KΩ的电阻,同时为防止仿真器插反保护元器件,将插座第6 引脚剪掉,仿真器对应的插孔堵住。JTAG 接口电路如图6所示。在PCB 硬件电路板设计时,时钟线需尽量用粗线,以增加电路的驱动能力。
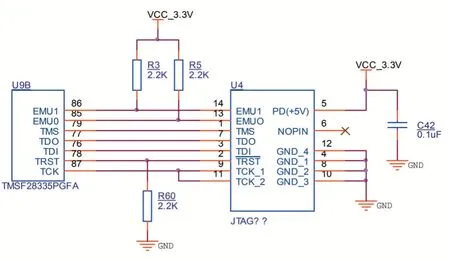
图6 JATG接口电路图
(5)复位电路设计
电子系统可能会受到外界环境、电路板信号线间的电磁等不稳定因素的干扰,或者出现软件程序出错跑飞等情况,都会导致系统工作异常,此时应进行系统复位,重新引导启动系统软件程序,进行初始化设置,将系统恢复至初始默认状态,并重新开始运行软件程序。
TMS320F28335 芯片是低电平复位的,并且其对低电平脉冲持续时长、上升时间均有严格要求,内核要求低电平复位脉冲持续时长最少为8 个晶体时钟周期(OSCCLK),VDD供电电压上升至1.5V 后的1ms 内复位脉冲必须为低电平,以确保内部Flash 工作稳定,并且振荡器还需10ms 时间才可稳定。所以复位脉冲时长为100ms 比较合适,可以兼顾到所有延时条件,保证系统稳定复位,也不会浪费宝贵的系统启动时间。考虑系统对电路板整体复位稳定性等因素,本系统选用MX6316 复位芯片,实现系统的手动复位,具体电路设计如图7 所示。当按键按下后,----MR引脚的输入信号为低电平时引脚输出信号立即变为低电平,系统接收到低电平信号后开始复位。

图7 系统复位电路设计
2 其他功能电路设计
2.1 TTMMSS332200F2288333355内部AADDCC模块
TMS320F28335 内部的ADC 模块具有自我校正功能,在芯片出厂时生产商将ADC 校验子程序直接嵌入OTP 寄存中,程序中包含芯片的具体校验数据,当TMS320F28335 上电启动时,Boot ROM 自动调用ADC校验子程序来初始化ADCREFSEL 和ADCOFFTRIM寄存器,在一次采样转换结束后,首先将采样结果加上或减去偏移校正值,再存放到相应的ADC 结果寄存器中,用以提高ADC 采样转换精度,但在实际应用过程中,发现ADC 采样转换精度提高不多,因此还需要采用其他ADC 校正方法,提高ADC 采样转换精度。ADC 结构框图如图8 所示。

图8 ADC模块结构框图
2.2 信号调理电路设计
所采用姿态测量传感器为加速度计,其输出信号为-3mA~+3mA 的电流信号,而 TMS320F28355 的 ADC模块输入的为电压信号。因此要将加速度计输出信号进行调理,使得接入ADC 模块的信号范围为0~3V。将传感器的输出信号与电阻R96 相连,转换为电压信号,进入同相比例放大电路,调节电位器R96,使得输出信号放大到-3~3V 之间,再通过电压转化电路将信号转化为0~3V,连接电压跟随器以增大信号驱动力。为保护ADC 输入端口,还需加上钳位电路,当电压超过3.3V 时,二极管D9 导通,输入到ADC 端口的电压为3.3V;当电压为负时,二极管D8 导通,输入到ADC 端口的电压为0V,因此该电路能使输入到ADC端口的电压稳定在0~3.3V 之间,对ADC 端口起到保护作用。信号调理电路如图9 所示。

图9 信号调理电路
2.3 AADDCC校正电路设计
由ADC 校正原理可知,要实现对ADC 增益误差以及偏移误差的校正,首要条件是向ADC 模块的输入通道分配两路已知的精准参考电压,由对应的结果寄存器的采样转化结果,可解算出ADC 自身的增益系数和偏移系数,在软件算法中校正其他采样通道,以实现数据的精确采集。ADC 校正电路如图10 所示。
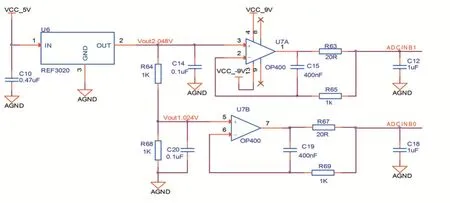
图10 ADC校正电路
2.4 液晶显示电路设计
系统选用12864 液晶显示器的驱动电压信号为3.3V,因此可利用TMS320F28335 的GPIO 引脚输出信号直接进行控制操作,不需要任何附加电路,即将GPIO58 引脚、GPIO22 引脚、GPIO59 引脚、GPIO23 引脚分别与液晶的复位RST 引脚、片选CS 引脚、数据SID 引脚、时钟 SCLK 引脚连接,只需 4 个 GPIO 引脚就可控制LCD12864 稳定工作,这样即节省了I∕O 端口资源,也简化了电路设计。并且可以通过电位器R71改变显示对比度,使其工作在最佳显示状态。液晶显示电路设计如图11 所示。

图11 液晶显示电路
3 结语
本文主要根据旋转导向钻井系统的特点实现了钻井姿态参数的传感器信号采集、数字滤波、ADC 校正误差等功能的硬件电路设计,是旋转导向井工具姿态参数数据采集系统的重要部分,后续的研究内容还需要设计相应的软件程序实现对工具姿态参数的采集与解算。
