基于实车试验的ADAS测试评价方法研究
2020-10-29杨帅季中豪杨路鹏刘兴亮王通
杨帅 季中豪 杨路鹏 刘兴亮 王通
(1.中国汽车技术研究中心有限公司,天津300300;2.中国汽车技术研究中心有限公司汽车工程研究院,天津300300)
主题词:先进汽车辅助驾驶系统 测试评价方法 实车测试 场景变量
缩略语
ADAS Advanced Driver Assistant System
LKA Lane Keeping Assist
BSD Blind Spot Detection
AEB Autonomous Emergency Braking
LDW Lane Departure Warning
CCRs Car to Car Stationary
CCRm Car to Car Moving
CCRb Car to Car Braking
BSD Blind Spot Detection
VRU Vulnerable Road Users
HMI Human Machine Interface
ESC Electronic Stability Control
SAS Speed Assist System
NCAP New Car Assessment Program
CPLA Car-to-Pedestrian Longitudinal Adult
TTC Time To Collision
GVT Global Vehicle Target
VUT Vehicle Under Test
CBLA Car-to-Bicyclist Longitudinal Adult
1 前言
如何保障道路交通参与者的安全一直是汽车行业重点关注的问题。根据世界卫生组织统计的数据显示,道路交通事故每年约造成全球范围内125 万人死亡,是15~29 岁年轻人的首要死亡原因。当碰撞事故发生时,若机动车行驶速度达到80 km/h,造成人员死亡的几率将大于60%,而如果碰撞时的平均速度降低5%,致命的交通事故将减少30%。若使用先进汽车辅助驾驶系统(ADAS)在事故发生前事先提示驾驶员或辅助驾驶员进行制动减速,很多人员伤亡的交通事故就可以避免[1-2]。
ADAS 利用安装在汽车上的摄像头、雷达等多种传感器,对车辆行驶中的前、后方及两侧盲区内的车辆、行人、道路环境等要素进行实时的感知和监控,并通过快速运算来分析可能发生的驾驶风险,从而辅助驾驶员进行操作决策。现有的ADAS功能主要分为通过预警提示驾驶员(如前碰撞预警功能、车道偏离预警功能、盲区监测功能)和主动干预辅助驾驶(如自动紧急制动功能、车道保持功能)2种。
目前,ADAS 的测试评价方法主要是通过搭建各类使系统功能激活的驾驶场景,在保证试验一致性的条件下,对系统的预警时间、避撞情况等进行性能表现的测试评价。
本文研究了目前国内外的ADAS 测试评价方法,从中提炼出典型的测试场景,并使用实车测试各场景中ADAS 性能表现,以此分析测试评价方法中各场景变量对系统表现的影响,从而进一步研究测试评价方法的场景设置的合理性和必要性。
2 国外测试评价方法
随着ADAS功能研究开发的深入和全球范围内装配ADAS的车型逐步增多,各国相关部门和机构,陆续发布了结合本国实际交通情况的ADAS功能的测试评价方法。并且,根据ADAS新功能的不断拓展,各测试评价方法也在陆续发布新的测试场景、测试功能和评价标准。
欧美等地区对于ADAS 的研究起步较早,2009 年欧洲就对部分车辆提出强制安装自动紧急制动(AEB)功能的要求,美国IIHS也于2013年发布了针对AEB系统的测试评价方法[3]。
在国外测试评价规范中,Euro-NCAP 覆盖的ADAS 功能最多,各功能的测试场景最全面。Euro-NCAP 于2013 年公布了第一版AEB(自动紧急制动)功能测试评价规范,其中的测试的场景包括了前方目标车辆静止(CCRs)、前方目标车辆慢行(CCRm)、前方车辆制动(CCRb)3 种。截至2020 年,Euro-NCAP又陆续引入了AEB 行人目标、骑车人目标等测试场景,并在不断丰富AEB 功能测试场景的同时,增加了车道偏离预警(LDW)、车道保持(LKA)、盲点监测(BSD)、车速辅助(SAS)的测试项目,逐渐形成了一个丰富完整的ADAS测试评价方法体系[4]。
除了Euro-NCAP 外,目前国外的ADAS 测试评价方法还包括有日本J-NCAP、美国IIHS、欧洲ECE,其中的测试评价的功能以AEB 功能为主,测试场景根据各地区实际交通情况的不同也各有区别。例如日本J-NCAP在AEB测试中考虑了夜间有对向来车远光灯干扰的场景变量,并设置了对应的AEB-VRU(弱势道路使用者)测试场景。
3 国内测试评价方法
随着国内ADAS 功能的不断发展和丰富,建立科学且成体系的测试评价方法愈发重要。2018 版CNCAP 将AEB 功能引入到测试评价规程中,形成了以ESC(汽车电子稳定性控制)功能、AEB车对车、AEB车对行人、HMI为主要内容的ADAS测试评价体系。
2019 年,经过大量ADAS 功能测试评价的经验积累,通过调研国内交通事故的统计情况分析,并结合国内外测试评价方法的发展,C-NCAP 发布了未来5年的发展路线规划。规划在2021 版C-NCAP 中增加多个AEB测试场景和其它ADAS功能的测试内容。
3.1 ADAS功能维度
根据ADAS功能使用传感器的类型和监测区域的分布,可将ADAS功能分为纵向安全辅助、横向安全辅助、低速车周安全辅助、提醒类安全辅助4 个维度,如图1所示。

图1 ADAS功能维度
2018 版C-NCAP 的ADAS 主要包括AEB 和ESC,功能仅简单覆盖横纵向的安全辅助维度。而2021 版C-NCAP 将增加AEB 车对车偏置场景、AEB 车对行人夜间场景、AEB 车对两轮车场景、BSD(盲区监测)功能、LDW(车道偏离预警)功能、LKA(车道保持辅助)功能、SAS(速度辅助系统)功能的测试,从测试功能项目和功能的场景变量2 个方面,极大丰富了横纵向安全辅助测试评价的内容,并且还将再加入提醒类安全辅助的SAS(限速标志识别)功能,形成包含2 项评价项功能(AEB、LKA)和4 项审核项功能(ESC、BSD、LDW、SAS)的测试评价体系。
2018 版和2021 版C-NCAP 的测试场景内容发生了较大的变化,其场景的权重也随之改变,具体如图2所示。可以看出,AEB 车对两轮车、车道保持等新增加的5 项功能在2021 版C-NCAP 中的权重总计占37%;AEB 车对行人由于增加了夜间场景和纵向识别的功能,因此所占比重基本不变;AEB 车对车虽然也增加了偏置场景,但在2021 版中删除了CCRb(前车制动)的场景,因此占比和ESC一样,有明显的减少。

图2 场景权重对比
3.2 典型场景
2021 版增加的场景主要可以分为2 类,分别是在原有功能中加入新的场景变量和加入新的功能,其测试场景的分布如表1 所示,其中方框内的场景为2021版新增加的场景。
对于新加入的场景变量如AEB 的偏置场景和夜间场景,可以设置原场景和新增场景的实车对比测试,在验证各场景下车辆的ADAS性能表现的同时,进一步分析场景变量对系统表现的影响;对于新增加的功能如车对行人纵向测试、车对两轮车、LDW、BSD,是根据ADAS功能的发展和分析中国事故场景案例得出的需要测试的功能,可以通过实车测试对其性能表现进行验证,并分析各功能的场景设置的合理性。
因此,本文将用实车进行2 项场景间的对比测试和4 项单场景的性能测试,包括AEB 车对车的正对和偏置场景的对比测试,AEB 车对行人的白天和夜间的对比测试,AEB的CPLA 测试、AEB车对两轮车测试和LKA、BSD功能的测试。
3.3评价方法
根据不同功能的测试场景,对ADAS 功能的评价方法也不相同。
对于AEB 功能,自动紧急制动功能和前碰撞预警功能的评价参数为试验车与目标是否发生碰撞以及碰撞时的相对速度,同时功能触发时刻的TTC(碰撞时间)、刹停后2车距离也可以作为评价系统性能表现的重要依据。

表1 测试场景汇总
对于LKA功能,评价主要依据试验车在LKA功能控制下纠偏的行驶路径,评价参数为试验车前轮外缘距车道线的最近距离或越线后的最远距离。
对于BSD 功能,评价主要依据在目标进入试验车盲区范围的过程中,试验车的报警时刻。同时报警时刻2车的距离位置关系、TTC也可以作为评价依据。
4 实车ADAS功能测试
本文测试采用一辆电动SUV 和一辆传统动力SUV 作为试验车辆(下文分别用车A 与车B 代替),2车均搭载有ADAS系统,包括了自动紧急制动、前碰撞预警、车道保持辅助、盲区监测等功能。测试采用高精度定位的组合惯导系统来测量采集试验车的运动状态、试验车和目标间的相对位置关系等信息。
参考国内ADAS 功能的测试评价方法,本文将结合2021版C-NCAP 的测试场景,进行如下功能的场景对比测试和性能测试。
(1)AEB车对车正对和偏置场景对比测试
(2)AEB车对行人白天和夜间对比测试
(3)AEB CPLA测试
(4)AEB车对两轮车测试
(5)LKA测试
(6)BSD测试
4.1 AEB车对车的正对和偏置场景对比测试
在AEB 车对车测试中,通过将测试车辆的行进轨迹向左或右偏置一定距离,可以进行不同碰撞点的测试,测试场景示意图如图3所示。

图3 碰撞点偏置测试示意
本文采用AEB CCRs(前方目标车辆静止)场景来进行正对和偏置场景的对比测试,在不同的试验车速下,分别进行左右偏置50%和正对的试验。试验结果将从自动紧急制动、前碰撞预警2个方面进行比较,并采用2功能激活时刻的TTC和试验是否发生碰撞的情况作为评价依据。
(1)前碰撞预警功能试验结果
前碰撞预警功能能预测到行车危险,并在碰撞危险发生前向驾驶员发出警报,本文试验通过采集报警时刻TTC 来进行正对和偏置场景的对比评价,2 车表现如图4所示。在试验车接近前方静止的目标车的过程中,车A 和车B 均在不同速度的正对和偏置场景下发出了前碰撞预警,功能激活TTC 分布在2.3~3.0 s 的区间内,且在试验车速度相同的场景中,正对场景的功能激活TTC较偏置场景更大。
(2)自动紧急制动功能试验结果
自动紧急制动是通过监测到行车危险,自动采取减速制动措施来减轻或避免碰撞,本文试验通过采集系统制动时刻TTC 和是否碰撞的情况进行对比评价,系统表现如图5所示。在试验车接近前方静止的目标车的过程中,车A 和车B 均在不同速度的正对和偏置场景下激活了自动紧急制动功能。车A功能激活TTC分布在0.4~0.8 s 的区间内,在试验车速度相同的场景中,正对场景的功能激活TTC 较偏置场景更大,并且正对场景的碰撞速度也较小。车B 功能激活TTC 分布在0.7~1.2 s 的区间内,在试验车速度相同的场景中,正对场景的功能激活TTC 较偏置场景更大,并且在出现碰撞的试验车速度50 km/h 的场景中,正对场景的碰撞速度也较小。

图4 前碰撞预警功能
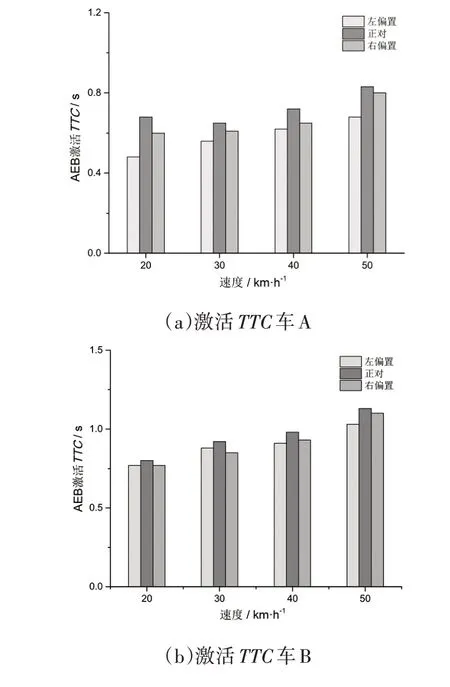

图5 自动紧急制动功能
综上所述,在相同的试验车速度下,车A和车B偏置场景的前碰撞预警和自动紧急制动功能的激活时刻都较正对场景更晚。在发生碰撞的场景中,偏置场景的碰撞速度也更大。因此,2 车偏置场景中的碰撞预警和制动避撞的表现均不如正对场景。
4.2 AEB车对行人的白天和夜间对比测试
新版C-NCAP 将在AEB 车对行人的测试中加入夜间场景,其中CPFA(行人远端横穿)场景是白天和夜间均需进行测试的场景(行人目标横穿速度为6.5 km/h),测试场景示意图如图6 所示。
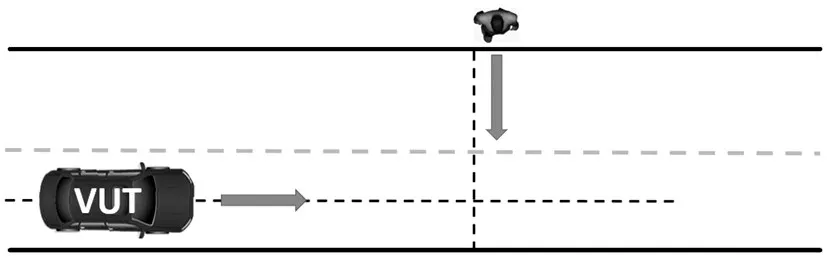
图6 CPFA场景示意
本文对CPFA 场景进行白天和夜间场景的对比测试,在不同的试验车速下,进行碰撞位置25%(试验车左起车宽的25%处)的自动紧急制动试验,并采用功能激活时刻的TTC 和试验是否发生碰撞的情况作为评价依据。
在试验中,车B 在夜间场景中对前方横穿的行人目标的识别率极低,各速度下均未能有效制动。因此,采用车A的测试结果进行对比评价,系统表现如图7所示。在车A 接近前方横穿的行人的过程中,在不同速度的白天和夜间场景下激活了自动紧急制动功能。在试验车速度相同的场景中,白天场景的功能激活TTC较夜间场景更大,并且白天场景的碰撞速度也较小。
综上所述,在相同的试验车速度下,车A 夜间场景的自动紧急制动功能的激活时刻较白天场景更晚。在发生碰撞的场景中,夜间场景的碰撞速度也更大。因此,在CPFA 场景中,夜间场景车A 的制动避撞的表现均不如白天场景。

图7 自动紧急制动功能
4.3 AEB CPLA测试
CPLA(前方行人纵向行进)场景区别于CPFA场景,是对试验车追尾同向行进的行人目标进行测试(行人目标行进速度为5 km/h),测试场景示意图如图8所示。

图8 CPLA场景示意
本文对CPLA 场景的测试,在不同的试验车速下,进行碰撞位置50%(试验车前正中处)的自动紧急制动试验,并采用功能激活时刻的TTC 和试验是否发生碰撞的情况作为评价依据,2 车表现如图9 所示。在试验车接近前方行人目标的过程中,车A 和车B 均在不同速度的场景下激活了自动紧急制动功能。车A 功能激活TTC 分布在0.4~0.8 s 的区间内,车B 功能激活TTC 分布在0.5~1.2 s 的区间内。在试验车速由20 km/h 提高到40 km/h 的过程中,2 车的功能激活TTC 随之增大,而当试验车速大于40 km/h 后,2 车的速度场景中功能激活TTC 变化不明显,且在高速场景中,2车均出现了碰撞的情况。
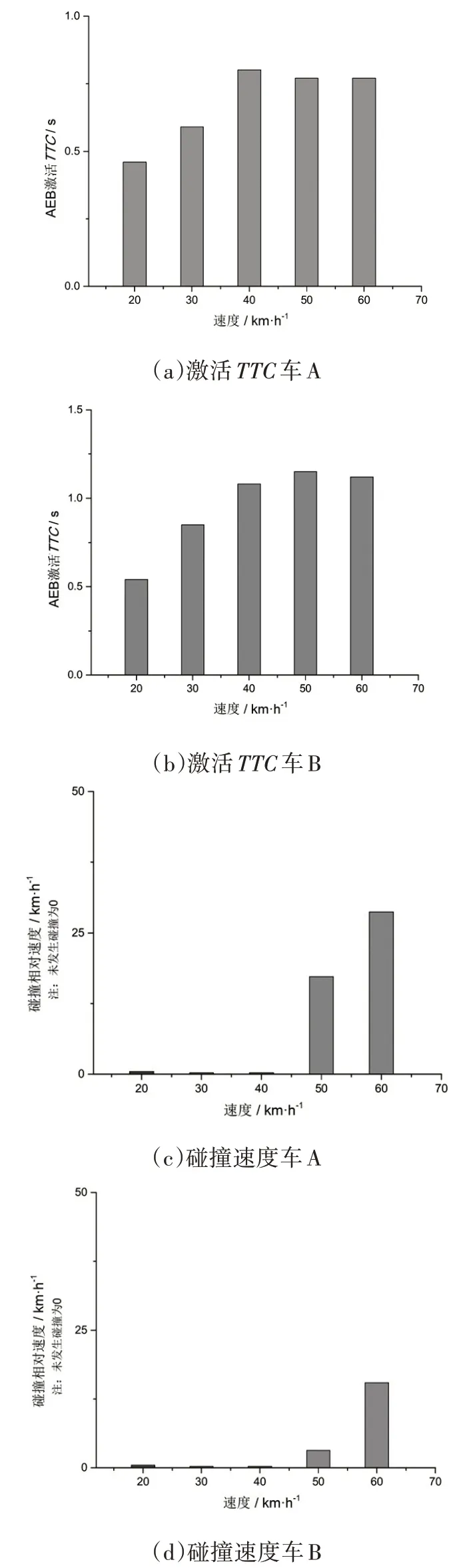
图9 自动紧急制动功能CPLA场景
综上所述,车A 和车B 在CPLA 场景中,均可激活自动紧急制动功能,在高速场景时功能激活更早。并且在避撞表现方面,2 车在试验车速小于等于40 km/h的场景中均能完成减速避撞,在大于40 km/h 的场景中功能激活的速度减小量均大于20 km/h。因此,2 车自动紧急制动功能在CPLA 场景中均能起到减速避撞和降低碰撞伤害的作用。
4.4 AEB车对两轮车测试
AEB 车对两轮车场景将使用自行车、电动车的新目标物,进行横穿和纵向行驶的测试。本文采用CB⁃LA(前方自行车纵向行驶)场景(自行车目标行驶速度15 km/h),在不同的试验车速下,进行碰撞位置50%(试验车前正中处)的自动紧急制动试验,并采用功能激活时刻的TTC、功能激活时刻试验车和目标的纵向相对距离和试验是否发生碰撞的情况作为评价依据。
由于同向运动的场景中,自行车目标的行进速度(15 km/h)高于行人目标的行进速度(5 km/h),因此本次测试将试验车车速区间适当增加为25~65 km/h。在试验中,车B 的AEB 系统各速度下均未能识别到自行车目标。因此,采用车A的测试结果进行评价,系统表现如图10 所示。在试验车接近前方两轮车目标的过程中,车A 在不同速度的场景下均激活了自动紧急制动功能,功能激活TTC分布在1.0~1.6 s的区间内,较行人目标的场景(CPLA)激活TTC 更大。随着试验车速的增加,功能激活TTC减小,但功能激活时刻试验车和目标的相对距离呈增大的趋势。车A 在CBLA 场景的各试验车速的场景下为出现碰撞,均完成减速避撞。

图10 自动紧急制动功能CBLA场景
综上所述,车A 在CBLA 场景中,均可识别到两轮车目标,并激活自动紧急制动功能完成避撞;车B 在CBLA 场景中,未能识别到两轮车,未激活自动紧急制动功能。车对两轮车场景可以对不同车辆的ADAS系统的目标识别能力进行检验。
4.5 LKA测试
LKA(车道保持辅助)功能能识别到车辆接近车道标记线并可能脱离本车道,并通过控制转向系统进行小角度纠偏,辅助车辆保持在本车道内行驶。本文试验通过试验车偏离和纠偏过程中行驶轨迹(参考点为试验车偏离侧前轮的外侧接地点)最外侧的越线距离,来评价车辆LKA 功能的性能表现,每组偏离速度场景各进行2次试验,两车表现如图11所示。
图11 中纠偏区域由2 次试验车辆的越线距离划定,图中还标明了各场景纠偏区域和车道线以及最远越线距离(车道线外侧0.2 m)C-NCAP 的相对位置关系。车A 和车B 在车辆以一定速度偏出车道时,均能通过LKA 功能完成纠偏,保持在本车道内行驶,且行驶轨迹未越过最远越线距离。
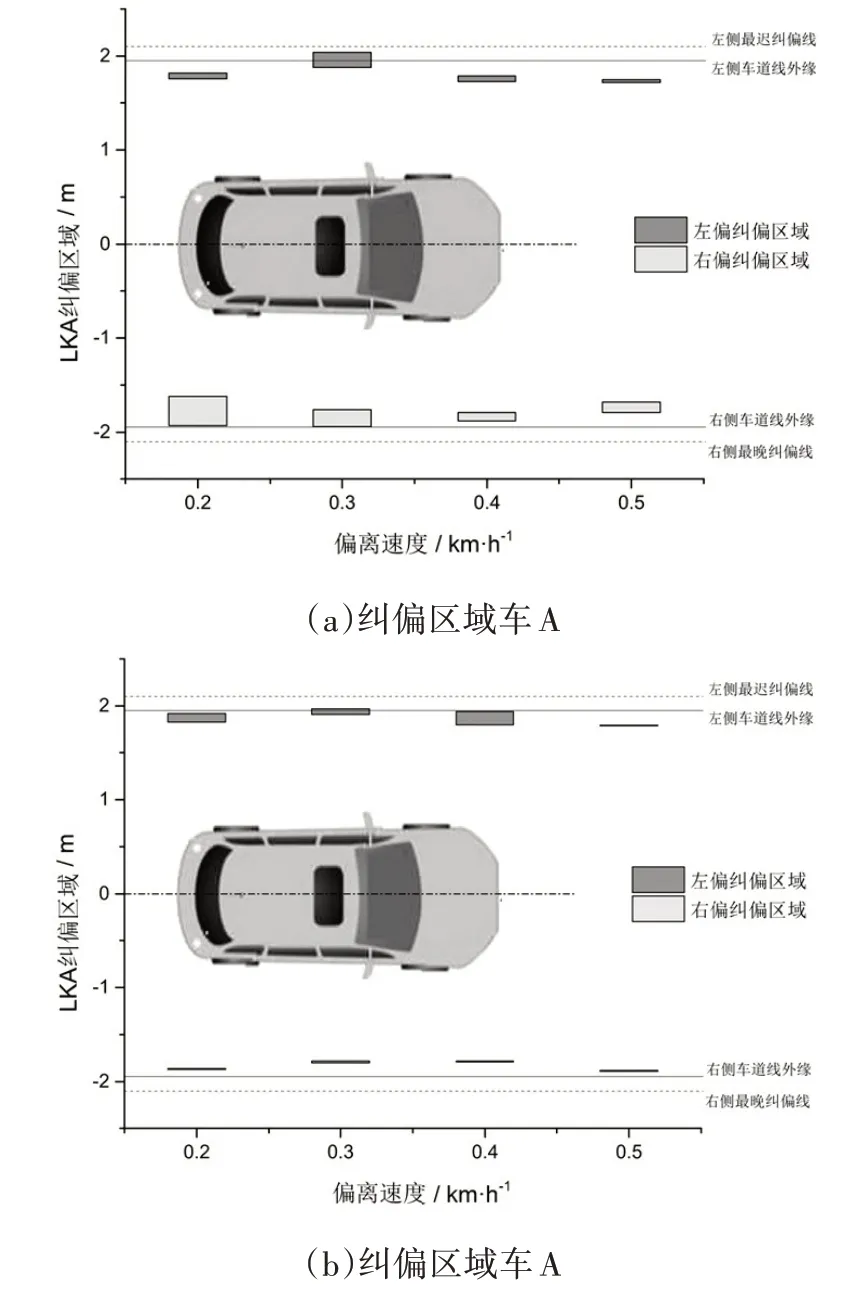
图11 LKA功能场景
综上所述,车A 和车B 的LKA 功能均起到辅助车辆进行车道保持的作用。
4.6 BSD测试
BSD(盲区监测)功能能探测车辆两侧的后视镜盲区中的超车车辆,并提醒驾驶员。
本文BSD 试验的测试场景包括目标车超越试验车和目标车横向移动,并通过报警时刻试验车和目标车间的相对距离(目标车前缘与试验车后缘的相对距离),来评价车辆BSD功能的性能表现。
(1)目标车超越试验车
该场景中目标车辆在试验车相邻车道,从后方以一定速度超越试验车,试验车在监测到目标车进入盲区时激活报警。本文试验通过采集报警时刻试验车和目标车的相对纵向距离来进行评价,各速度场景进行2 次试验,2 车表现如图12 所示。车A 报警时刻的相对距离在15~21 m 的区间内,车B 报警时刻的相对距离在14~20 m 的区间内,均在A 线(平行试验车后缘,后缘后部30 m 处)和B 线(平行试验车后缘,后缘后部3 m 处)之间激活报警,且随着试验车速度的增加,2 车左右侧报警时刻的相对距离均呈增大的趋势。
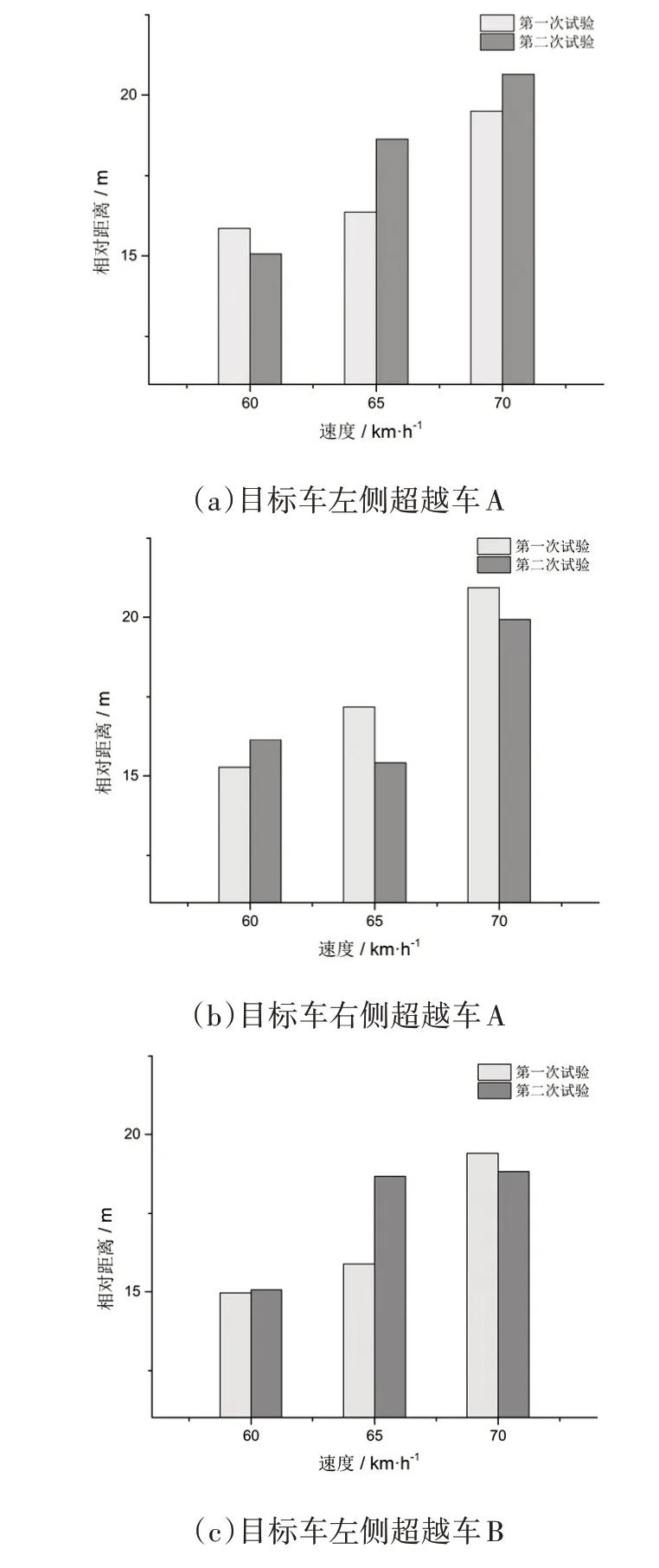
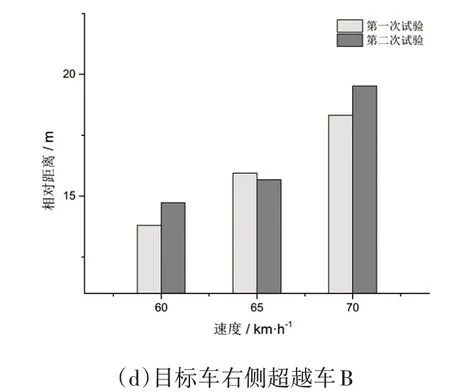
图12 BSD目标车超越试验车场景
(2)目标车横向移动
该场景中目标车和试验车均以50 km/h 沿车道匀速直线行驶,并保持6~7 m横向距离,当目标车越过试验车辆的B线(车后缘后部3 m)且在完全在C线(位于第九十五百分位眼椭圆的中心)之后时,目标车辆由试验车相隔车道变道至相邻车道(2 车横向距离1.5 m),保持一段时间后,再变道回相隔车道。本文试验通过采集报警阶段2车的相对横向距离(2车相近侧两边缘的相对距离)来进行评价,2车表现如图13所示。

图13 BSD目标车超越试验车场景
当目标车从左右侧由试验车的相隔车道向相邻车道变道的过程中,车A 报警时2 车相对横向距离分别为4.2 m 和3.8 m,车B 报警时2 车相对横向距离分别为4.2 m 和3.5 m;当目标车从左右侧由试验车的相临车道向相隔车道变道的过程中,车A 结束报警时2车相对横向距离分别为5.7 m 和5.6 m,车B 结束报警时2 车相对横向距离分别为5.5 m 和5.1 m。车B 在目标车移入相邻车道后出现了报警中断的现象,在目标车移出相邻车道时又恢复了报警。
综上所述,车A 和车B 的BSD 功能,在目标车超越试验车和目标车横向移动的场景中,均能识别到盲区内的目标车并报警。车B 在目标车横向移动的场景中,出现了报警中断的现象。
5 结论
本文结合国内外ADAS 测试评价方法,提取出测试评价方法中AEB、LKA、BSD 3 个功能的多个典型试验场景,并使用2辆实车进行场地试验的测试验证。
通过对2 车进行各场景的试验发现,车A 的AEB功能在夜间和偏置场景中的表现不如白天和正对场景中的表现,在其他场景的测试中各功能均能起到预期作用;车B 的AEB 功能存在夜间未能识别横穿的行人目标、未能识别前方纵向行驶的2 轮车的问题,BSD功能存在目标车横向移动的场景中报警中断的问题,LKA功能可以起到辅助车辆进行车道保持的作用。
结合实车测试结果可以看出,在AEB 测试中增加夜间、偏置等场景变量会一定程度影响车辆ADAS 的性能表现,可以更好检验系统在各类环境条件下的表现情况。因此,随着对ADAS安全性要求的不断提升,其测试评价方法也将添加更多的场景变量,如目标类型、道路路况、天气条件等。而对于新增加的ADAS功能,各车型的系统表现也存在明显差异,应尽快制定相应的测试评价方法,以保证功能的安全性和可靠性。
