基于模型与双卡尔曼滤波的锂电池参数辨识
2020-10-26刘政黄和悦赵振华
刘政 黄和悦 赵振华
1 桂林航天工业学院 电子信息与自动化学院,广西 桂林 541004; 2 桂林航天工业学院 外语外贸学院,广西 桂林 541004
锂离子电池以其长寿命、低自放电率、无记忆效应和高安全性等优点而广泛应用于电动汽车[1]。精确的估计电池状态可能受到各种因素的限制,例如循环时间、放电深度、老化条件等。因此,必须设计动力电池能量管理系统,该系统在有效控制充电和放电方面起着至关重要的作用。高精度电池状态估计的前提是可以获得可靠的参数辨识结果,这为维持更长的持续充放电时间提供基本保证[2-3]。因此,可靠、高精度的模型参数辨识方法是动力电池能量管理系统提供有效能量控制策略的重要组成部分。
模型设计是参数辨识的前提[4]。通常,电化学模型和等效电路模型是表征锂离子电池动态行为的两种主要方法。电化学模型由电化学偏微分方程式描述,这在数学运算上过于复杂且不利于实时应用[5]。与复杂的电化学模型相比,等效电路模型仅利用少量的阻容网络和并联的欧姆电阻来表示锂离子电池的外部动态电气特性[6]。锂离子电池的非线性动态响应可以用简单的一阶等效电路模型表示。尽管与一阶等效电路模型相比,多阶等效电路模型可以更好地表征电池动态特性,但随着算法复杂度的提高,需要辨识出更多的等效电路模型参数[7]。因此,有效的等效电路模型很大程度上取决于相应模型的复杂性和精度之间的平衡[8]。在锂离子电池持续充放电期间,等效电路模型的参数处于变化的过程中,需要提出相应的辨识算法来匹配参数变化。递归最小二乘方法与多新息理论被用来辨识等效电路模型参数[9],递归最小二乘方法和无迹卡尔曼滤波结合起来改进电池荷电状态的估计效果[10]。根据电池时间尺度的划分,在子模型中利用分布式最小二乘方法对电池参数进行辨识[11]。通过考虑温度和荷电状态双重影响,利用最小二乘方法得到一阶等效电路模型的参数辨识结果[12]。以上这些辨识方法匹配了等效电路模型参数的变化,但都没有考虑量测噪声对模型的影响。
为了提高参数预测的性能,提出了具有电流补偿因子的一阶等效电路模型。将量测电流和电流噪声组合以构建等效电路模型。一阶等效电路模型表示锂离子电池的外部电气特性,电流噪声反映额外的测量噪声影响,基于改进等效电路模型的双卡尔曼滤波算法被应用于递归辨识等效电路模型参数。将状态的卡尔曼滤波添加到参数的卡尔曼滤波中,可以实现更好的性能。
1 等效电路模型
锂离子电池状态和参数精确估算的基本前提是需要一个可靠的模型来逼近锂离子电池的动态内部特性。为了在模型精度和计算复杂度之间取得平衡,本文利用单欧姆电阻R0串联一阶并联极化电阻Rp和极化电容Cp来描述锂离子电池的动态特性。充电/放电电流和端电压可以根据直接量测值得到,开路电压(Open Circuit Voltage: OCV)表示等效电压源。
待辨识参数包括欧姆电阻R0,极化电阻Rp和极化电容Cp,同时为了后期建立OCV-SOC函数,开路电压OCV也需要辨识。
(1)
其中,zk表示端电压,Uoc,k表示OCV,im,k表示k采样时刻的电流,Up,k表示极化阻容网络RpCp电压,Δt是采样间隔时间。
式(1)端电压和极化电压的采样电流理论上认为是精确的,并未考虑测量干扰的噪声影响(例如电流噪声),因此它往往会导致参数估算时出现较大误差。为了描述未知电流噪声的影响,量测电流im,k包括实际电流ir,k和电流噪声in,k,如图1所示。
im,k=ir,k+in,k
(2)
故式(1)可以改写为:

(3)
与式(1)相比,增加的in,k可以用来表征电流噪声的影响。

图1 改进等效电路模型示意图
2 在线参数辨识
根据图1所示的改进等效电路模型,将极化电压Up作为状态xk=[Up]T,端电压作为观测量zk=[Um]T,对应的状态方程和观测方程如下:

(4)
其中,xk是状态量,zk是观测量,wk和vk分别是随机过程噪声和观测噪声。
将锂离子电池等效电路模型的参数作为参数滤波算法处理的参数矢量θ,也就是:θ=[R0RpCpVocin],离散状态方程和量测方程如下:

(5)
其中,θk是参数辨识值,g()是观测值,rk是随机过程噪声,ek是随机观测噪声,假设噪声满足高斯分布。
考虑到锂离子电池在充电/放电过程中表现出的强非线性特性,本文采用双扩展卡尔曼滤波(Dual adaptive extended Kalman filter:DAEKF)方法来迭代辨识模型参数。

步骤1: 初始化
(6)
Step 2:先验辨识
参数先验辨识
(7)
(8)
状态先验辨识
(9)
(10)
Step 3:后验辨识
状态增益矩阵
(11)
Hk=[1]
参数增益矩阵

(12)
参数量测更新
(13)
(14)
(15)
状态量测更新
(16)
(17)
Pk|k=(I-KkHk)Pk|k-1
(18)
基于式(6)至式(18),可以进行递归计算,得到等效电路模型参数的在线辨识结果。
3 结果与讨论
建立高精度电池测试平台,以验证所提出的参数辨识效果。选择20 Ah/24 V磷酸铁锂离子电池作为测试对象,高精度电池测试平台包括动力电池测试系统(Arbin EVTS),Arbin EVTS支持电流测试:0~300 A、电压测试:0~400 V,电压和电流测量误差范围均在0.1%以内。连接Arbin EVTS的计算机以1 s的时间间隔采样和存储测试电流和电压数据,例如充电/放电电流、端电压。
磷酸铁锂离子电池通过恒流-恒压方法充满电,然后放置两个小时,分别在两种工作条件下放电。DST工况数据用于验证参数辨识效果,DST工况的电流如图2所示。

图2 DST工况电流
3.1 模型参数辨识结果与分析
DST工况下的35 000 s持续放电激励,以1 s间隔采样电流和端电压,将考虑电流噪声的改进模型与DAEKF算法结合去辨识等效电路模型参数和端电压。辨识得到的欧姆电阻、极化电阻、极化电容和开路电压OCV如图3所示。
两种工况下对等效电路模型参数辨识前,需要对其进行适当的初始化赋值,就本文来说,参数初始化值分别设置为:R0=50 mΩ,Rp=10 mΩ,Cp=400 F。如图3(a-b)所示,等效电路模型参数辨识结果在DST工况下都能快速收敛到稳定值。开路电压OCV的辨识结果如图3(d)所示。这其中,欧姆电阻R0和极化电阻Rp的辨识结果除了少许波动外,两者的变化趋势具有相似性,欧姆电阻R0的稳定性稍优于极化电阻Rp。与欧姆电阻R0和极化电阻Rp相比,极化电容Cp的变化稍显增大,这是由于阻容网络RpCp直接用来逼近锂离子电池的动态超电势。尽管多阶模型比一阶模型可以更好地抑制阻容网络RpCp的波动,但是更多的模型参数需要辨识,增加了算法复杂度,降低了应用实时性。总的来说,欧姆电阻R0与阻容网络RpCp在放电过程中小幅度变化以保持对锂离子电池内部电化学进程的跟踪,且不同工况下的参数辨识结果具有一致性。
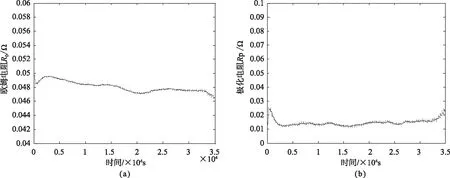

(a)欧电阻R0; (b)极化电阻Rp; (c)极化电容Cp; (d)开路电压OCV/V.图3 DST工况参数辨识结果
3.2 端电压辨识结果与分析
在R0、Rp、Cp辨识结果基础上,端电压作为等效电路模型输出量在每个采样周期被迭代辨识得到。图4比较了在DST工况下三种方法的端电压辨识结果。图4(a)是基于递归最小二乘的辨识值,相应的图4(b)表示没有电流噪声补偿的双卡尔曼滤波-无补偿的辨识值,图4(c)表示具有电流噪声补偿的双卡尔曼滤波-有补偿的辨识值。尽管基于三种算法的辨识结果均具有较小的幅度波动,但完整的连续放电过程中,基于双卡尔曼滤波的端电压辨识误差明显优于递归最小二乘,这意味着无论有无噪声补偿,双卡尔曼滤波都可以精确跟踪端电压的量测值。值得注意的是,双卡尔曼滤波-有补偿的辨识误差在测试初始阶段相对较大。在DST工况循环下,双卡尔曼滤波-有补偿的最大绝对误差为0.053 2,双卡尔曼滤波-无补偿的最大绝对误差为0.068 9,递归最小二乘的最大绝对误差为0.117 9,电流噪声补偿可以提高一阶等效电路模型精度。根据以上分析,端电压误差估计结果验证了带电流噪声补偿的一阶等效电路模型的可靠性,也验证了双卡尔曼滤波算法在递归计算中的有效性。

图4 DST工况下3种方法辨识端电压误差
4 结束语
在改进的等效电路模型基础上,提出了一种有效的双卡尔曼滤波算法用于锂离子电池参数辨识。考虑的电流噪声被添加到量测电流中,以表示对一阶等效电路模型的补偿,从而有效地减少来自量测电流的干扰。基于状态和参数双重更新的双卡尔曼滤波方法被用来抑制等效电路模型参数波动,从而更好地递归辨识模型参数。采用DST工况数据来验证参数辨识的效果,与没有电流噪声补偿的递归最小二乘方法和双卡尔曼滤波无补偿方法相比,带电流噪声补偿的双卡尔曼滤波有补偿方法的参数辨识效果得到了显著改善。在OCV-SOC曲线中,平坦区域的强非线性容易同时影响参数和SOC估计精度。因此,我们未来的研究将侧重于优化模型参数辨识和OCV误差修正的组合上,以削弱OCV-SOC平坦曲线在SOC估计中的影响。
