机载LiDAR技术在1∶500地形图测绘中的应用
2020-10-25范炜
范 炜
(安徽省芜湖县自然资源和规划局,安徽 芜湖 241100)
LiDAR(Light Detection and Ranging) 系统集成全球定位技术(Globe Position System,GPS)、惯性导航技术(Inertial Navigation System,INS)、激光测距技术(Scanning Laser Ranging,SLR),快速采集地表点的摄影测量装置,能自动生成精确的数字地面模型(Digital Terrain Model,DTM)和数字表面模型(Digital Surface Model,DSM)。随着机载LiDAR技术的不断发展,其已被大量应用于数字线化图(Digital Line Graphic,DLG)的制作中。文章以1∶500地形图制作项目为例,阐述机载LiDAR技术在获取地表点云数据的操作流程,探究其在测图过程中的关键应用。
1 LiDAR技术工作原理
激光点根据LiDAR激光测距仪获得的斜距以及记载位置与姿态的POS系统数据,并在惯性导航系统定义的各坐标系中旋转、平移与WGS-84坐标系间的相互转换,计算出LiDAR地云的地面点目标,定位方程如下:

式中:RW为局部椭球系统到WGS-84坐标系统的转换矩阵;RGEO为局部椭球系统与导航坐标系之间的转换矩阵,近似为单位矩阵,因此公式(1)简写成公式(2);RNW为导航坐标系统与WGS-84坐标系统间的转换矩阵;RINS为IMU载体坐标系变换至导航坐标系的矩阵;Rlu为安置角旋转矩阵;Rlb为瞬时激光光束坐标系转换至激光坐标系统的旋转矩阵;为激光点数据在激光光束坐标系中的位置向量;lo为GPS天线相位中心距激光器发射中心的偏移向量;PGPS为目标激光点在WGS-84坐标系统中的坐标。其中:

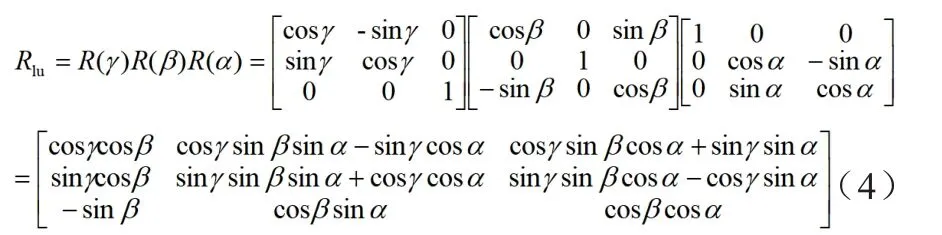
式中:α、β、γ为激光扫描仪与IMU载体坐标系间的安置误差角;同时定义r(侧滚角)、p(俯仰角)、h(航向角)为IMU载体坐标系与导航坐标系的姿态角,由此可得:
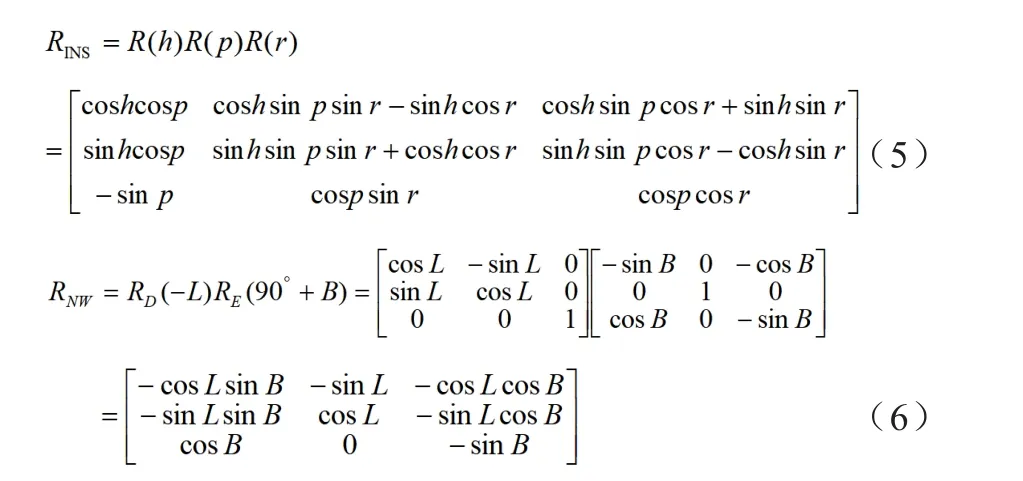
式中:L和B为飞机所在的经度和纬度。
2 应用实例
2.1 项目概况
项目区地形主要以山区和高山区为主,最高海拔约1750m,最低海拔约210m,项目区面积共计约400km2。由于项目工期较短,综合考虑测图速率与精度,项目采用机载LiDAR技术进行1∶500地形图产品制作,包括DLG、数字正射影像(Digital Orthophoto Map,DOM)成果。机载LiDAR测量系统采用扫描鹰HS-1600激光扫描测图系统,集成了卓越性能的RIEGL测绘专业激光扫描仪以及Applanix惯导卫星定位姿态控制单元,其扫描距离可达1350m,扫描速度可达82万点/s,扫描视角330°,并搭载PhaseOne专业相机系统,有效像素8000万。航摄平台采用适合山区作业的S-300C多功能直升机。
2.2 技术方案
(1)数据采集。①航线设计。项目区地形复杂,高差较大,在保证产品精度质量的前提下,综合考虑测区地形、飞行安全、航测效率的情况,旁向重叠设计为40%,航向重叠设为70%,航线水平距离为200m。②GPS基站布设。机载LiDAR系统采用差分GPS定位技术,提前在地面控制站上安置GPS接收机,单台GPS基站有效测量范围为30km,双台基站的控制距离在60km内。根据实地情况,此次项目布设2台基准站,基站间距离约为25km,机载LiDAR系统与地面接收机的采样频率均设置为1Hz或2Hz。③像控与检查点测量。为提高成图数据精度,消除系统误差,满足1∶500成图地物点与高程精度要求,均匀布设像控点,像控点间距约2km,并以部分像控点做平面检核点。同时在高差明显区域,测量高程检核点,以检核点云数据精度。④检校飞行。项目采用的检校飞行方式是以一个较低的航高飞行相互垂直的十字形航线,并用相对较高的航高飞行两条相互垂直的十字形航线,航高不同的航向相反。不同航高有助于检校的Pitch和Heding角值更准确,检校场有地形起伏、带尖角楼房、平坦道路的地方。姿态角补偿收敛记录如表1所示。⑤航迹解算。应用载波相位模糊度解法,实时解算动态定位中的整周模糊度,提高动态定位效率。结合动态GPS数据和GPS基站数据,集成IMU数据采用正反算法生成固定整数差分GPS航迹线,包括航迹时刻、位置、Omega、Phi、Kappa的航迹线文件。根据扫描仪偏心分量与相机偏心分量,计算得出相机轨迹数据与激光轨迹数据。
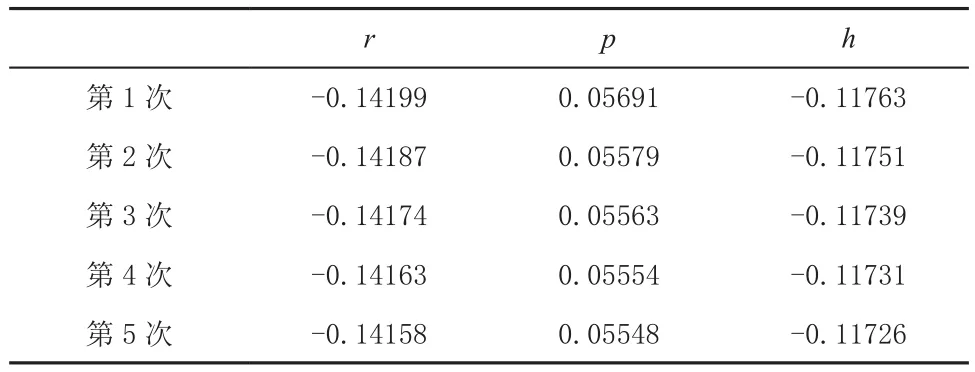
表1 姿态角补偿收敛记录 单位:°
(2)数据处理。①坐标转换。动态定位获取的激光点坐标属于WGS-84坐标系,项目成果坐标基准要求为国家2000大地坐标系,高程为水准高,需进行WGS-84坐标系与大地坐标系间、大地高与水准高间平面与高程的坐标转换。选取覆盖项目区的4个已知坐标与其对应的WGS-84坐标求解平面转换参数,获取点云数据所需的平面坐标。采用曲面拟合的方法,将椭球高改正到大地水准面的正常高上,完成点云数据的高程坐标转换。②点云分类。机载LiDAR数据密集、量大,主要包括激光点的三维位置、回波强度数据、回波次数数据、指定脉冲的回波数、扫描角数据、GPS时间、RGB等信息。
点云数据处理的主要方式为点云分类,将点云数据按实际情况分类到各个数据层中。由于点云数据量大,先对数据做抽稀处理、航带重叠裁切、冗余数据剔除。地面材料不同的光谱特征与高程的不同导致返回的脉冲信号强弱不同,综合机载LiDAR点云的多回波特性、反射强度,获取第一返回的脉冲信号,即只记录地面的脉冲信号,并采用分类算法将点云数据进行粗分类,分离出地物点与地面点。而精分类是在粗分类基础上去除采集地面点系统误差,包括地面点过滤、特征提取等,实现点云数据按照不同的点云定义不同的层要求。地面点与地物点的精分类由人工干预完成,对高程突变区、噪声不明区、调试算法或参数,重分类错误分层的点,主要弥补滤波分类算法中地表、地物数据分离准确低的不足。点云数据分类前后图如图1所示。
(3)DLG制作。根据影像处理系统软件,自动完成空中三角测量。地物采集过程中,直接调用空三加密成果。DLG制作分别为等高线制作与地物采集,地物采集在数字测量系统软件中进行,并保持实际地物的完整性、准确性;等高线由处理后的点云数据经过地面点精分类后自动生成,并采用抽稀后的LiDAR点作为高程注记点。点云成果数据与测图的数据结合,利用cass软件对图形修测、编辑,并根据野外调绘成果,生成1∶500DLG数据。
3 精度分析
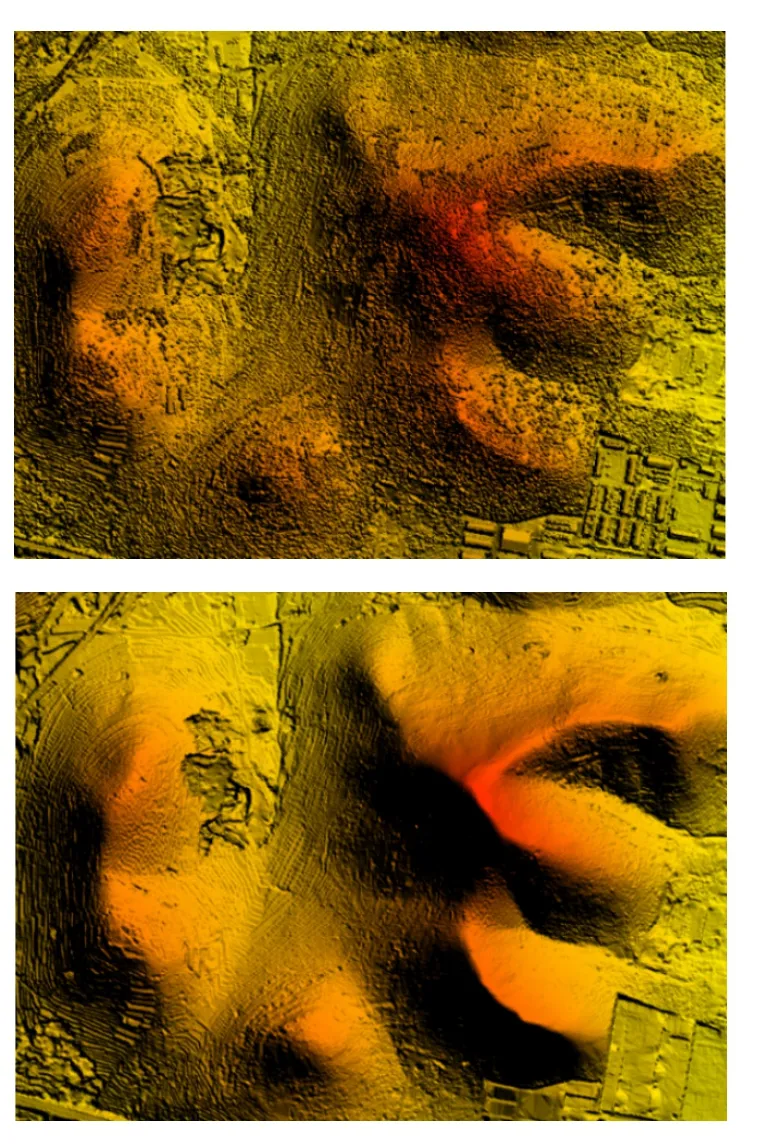
图1 点云数据分类前后图
点云数据与DLG数据精度由野外测量散点进行检核,计算出点云数据与DLG的精度如表2所示。根据1∶500数字化地形图成图规范平面中误差为±0.2m,高程中误差为±0.5m,点云数据高程中误差为±0.5m。由此得出,机载LiDAR技术辅助1∶500地形图测绘满足精图要求。
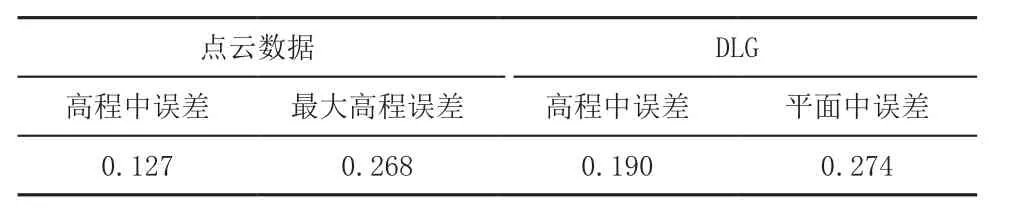
表2 点云数据与DLG的精度 单位:m
4 结束语
采用机载LiDAR技术,能够快速采集地形数据,激光能够部分穿透植被,快速获取地面三维坐标。山区地形图制图较为复杂,工作量较大,辅以机载LiDAR技术,能提高工作效率。因此,机载LiDAR技术适合工期紧张的地形图测绘项目。应用机载LiDAR技术测制山区大比例尺地形图能够满足精度要求,与传统航测成图相比,高程中误差要比平面中误差小。
