直升机航空施药全覆盖航线规划算法
2020-10-23刘洋洋陈旭阳
刘洋洋,茹 煜,刘 彬,陈旭阳
·农业航空工程·
直升机航空施药全覆盖航线规划算法
刘洋洋,茹 煜※,刘 彬,陈旭阳
(南京林业大学机械电子工程学院,南京 210037)
为避免航空施药过程中由于多施、漏施、重施等现象造成的覆盖不精准问题,该研究开发了一种航程短,覆盖范围精准的航空施药全覆盖航线规划算法。首先基于区域全覆盖原理,通过对施药作业区域外喷雾航程计算与分析,得出在全覆盖的前提下,区域外最短喷雾航程计算公式。再结合全覆盖航线规划方法,得出全覆盖航空施药的最优航线规划算法,并通过软硬件设计实现了实时采集飞行轨迹,通过OneNet物联网平台与移动终端进行信息双向传输。最后分别对3种不同地形的试验场地进行了7个不同航向的全覆盖喷雾作业试验。试验结果表明,在3种试验场地中,按照规划航向作业的航程比试验组按照其他6个航向作业的航程短,航程比其他航向的航程最大可分别缩短4.920、6.903、59.913 km;且多余覆盖率均为最小,多余覆盖率最小分别为2.08%、7.17%、0.57%。作业面积越大,规划航向作业的航程缩短越明显,多余覆盖率越小,并且规则地形航线规划的多余覆盖率明显小于不规则地形。所提出的航空施药全覆盖航线规划算法,可为航空施药航线规划技术的发展提供理论支撑,为实际施药作业提供指导。
路径规划;航空施药;全覆盖路径;R44直升机
0 引 言
中国人工林保存面积高达7×107hm2,居世界首位,但是中国的森林资源分布不均匀,并且病虫害频繁发生,严重破坏林业生态系统,导致林木产量较低[1-2]。近几年中国林业病虫害发生面积占人工林面积的23.7%,占林业有害生物总发生面积的80%,因病虫害发生造成的经济损失和生态服务价值损失超过1 100亿元,因此病虫害的防治是粮食和林木生产不可或缺的重要环节[3-5]。中国林业目前最常用的病虫害的防治方法,是通过喷洒化学药品进行防治,而施药主要有人工施药、地面机械施药和航空施药3种方式[6]。航空施药是现代农业的重要组成部分,不仅反映农业现代化的先进水平,也是精准农业发展方向之一[7-8]。相比人工施药和地面机械施药,航空施药作业具有速度快、成本低、效率高等特点,并且不受作物长势以及林业地理因素的制约,尤其可以及时有效的防治突发性或爆发性病虫草害[9-10]。
目前,航空施药作业主要基于有人驾驶的固定翼飞机、直升机和无人机3种运载方式。与固定翼飞机相比,直升机不需要专用跑道,可以垂直起降,维护成本较低[11-13]。与无人机相比,直升机具有载药量大、作业效率高、续航时间长、操控灵活等特点,可一次作业约70 hm2地,可适应丘陵、山区等地形复杂的施药作业区域[14-15]。因此直升机兼具固定翼飞机和无人机的优点,是林业植保作业的最佳选择。直升机旋翼产生的涡流可以提高喷洒效果,能使农药均匀覆盖在作物茎叶的背面,提高施药效果,减少对周边环境的危害[16-17]。
航空施药的关键技术是航线规划,针对直升机施药作业的航线规划主要分为点对点调度航线规划和区域全覆盖作业航线规划。国内外关于航空施药航线规划的研究较早,在区域侦察监测、目标跟踪、多区域调度、躲避火力威胁方面以及地形避障等方面的研究已较为成熟[18-24]。这些研究都是利用点对点的调度航线进行规划研究,而在林业航空施药方面,全覆盖航线规划尤为重要,国内外学者在全覆盖航线规划方面的研究较少。Popescu等[25]对无人机航线控制与优化的研究,Marina等[26]研究的无人机覆盖航线规划方法,徐博等[27-28]提出植保作业航迹规划算法,以及黄小毛等研究的无人机自主作业路径规划[29],都可以实现区域全覆盖施药航线的规划。然而以上研究皆是基于植保无人机平台的区域全覆盖施药航线规划。加拿大AG-NAV公司的Guia系统可根据指定航向规划出作业航线,并可指引飞行员按照规划航线驾驶[30]。但是该系统价格较高,并且未能体现规划航线的航程最短和多余覆盖率最低的特点。中国北京农业智能装备技术研究中心研发eFieldSuvey系统可体现航程最短的特点,但该产品规划的航线越精准计算量越大,并且主要应用于无人机。目前大多数有人驾驶直升机施药作业还主要是通过目视即时规划航线的方式。这种作业方式对飞行员的主观依赖过大,存在航线偏离严重,易产生多施、漏施、重施等现象,造成覆盖不精准问题,并且存在航线冗余问题,造成燃油和农药的浪费,导致施药效率较低、环境污染严重、作业成本高等问题。
因此本文针对R44有人驾驶直升机进行研究,提出一种航空施药全覆盖航线规划算法,旨在根据不同的作业环境规划出最优全覆盖施药航线,使在施药作业区域全覆盖的前提下,喷雾航程最短,覆盖范围更加精准。
1 区域全覆盖施药航线规划理论
1.1 整体分析
施药作业过程中的航线可分为喷雾航线和转向航线。其中喷雾航线是指进行农药喷洒作业时飞行的路线。由于喷雾作业过程中的喷幅不变,所以喷雾航线越长,喷洒面积越大,药液使用量越大。转向航线是飞机转弯或者掉头过程中飞行的路线,在该航线上飞机不进行喷雾作业。由于转向航线会因飞行员驾驶技能差异、飞机型号不同、航速高低以及风速的变化而有所不同,不可控因素过多,所以本文只针对喷雾航线进行研究。通过以上分析可知,在全覆盖的前提下使喷雾航线的航程最短,喷雾面积则最小,即可保证多余覆盖面积最小,从而覆盖范围最精准。
由于林业的施药作业区域多为不规则地形,为确保作业区域全覆盖,喷雾航线需要超出作业区域的边界线。因此减小边界外的喷雾航线长度,即可减小多余喷洒面积,使喷洒范围更加精准。
由以上分析可知,为确定最短的全覆盖喷雾航线,应按以下5步进行分析:1)针对施药作业区域建立环境坐标系;2)分别计算每个边界的斜率;3)计算作业区域外喷雾航线总长度,即区域外总喷雾航程;4)确定区域外总喷雾航程最短的坐标系;5)根据全覆盖航线规划方法规划出覆盖最精准的喷雾航线。
1.2 喷雾航程计算

2)计算每个边界的斜率。
式中k为第条边的斜率;(x,y)为第个顶点的坐标;为整数。
注:多边形12…P区域为施药作业区域;为坐标原点;ABCD为两条平行且相等的区域外喷雾航线和转向航线以及区域边界线组成的平行四边形。
Note: The area of polygon12…Pis the spray area;is the origin of coordinates; ABCD is a parallelogram composed of two parallel and equal out-of-area spray routes, turning routes, and regional boundary lines.
图1 施药作业区域及航线边界示意图
Fig.1 Spray area and schematic diagram of routes border
3)计算施药作业区域外总喷雾航程。由于航空施药大多采用牛耕往复法进行喷雾作业,所以每条喷雾航线都平行于起始边。在所建立的坐标系中,以轴为起始边,结合喷幅可计算出在全覆盖的前提下,每一个坐标系下除平行于轴以外的每一条边界上需要多少条喷雾航线。

式中M为第条边所需的施药航线的条数;为喷幅宽度,m。
计算第条边上的作业区域外喷雾航程l,如图1b所示。由于喷雾航线相互平行,间距为喷幅,所以图1b中四边形ABCD为平行四边形,所以可得:

式中l为每条喷雾航线在施药作业区域外的航程,km;为施药作业区域边界线的斜率。
由于每条边界上的区域外总喷雾航程由该边界线上的每条区域外航程的累加得到。所以结合式(2)和(3)可进一步得到:
式中l为第条边界上区域外喷雾航程,km。
将式(1)代入式(4)得到

该施药作业区域外总喷雾航程等于所有区域外喷雾航程的总和,即

式中为施药作业区域外总喷雾航程,km。
4)确定最短的喷雾航程坐标系。由于施药作业区域为多边形,按顺时针或逆时针给每个顶点编号,再分别以作业区域的每条边界为轴,以该每条边界的起始端点为坐标原点,建立坐标系,得坐标系1,2,…,Z。
再通过式(6)计算并对比得出个坐标系下的最短作业区域外总喷雾航程L,此时的坐标系Z即为最短的喷雾航程坐标系。
当所有坐标系下的施药作业区域外总喷雾航程都为0时,即施药作业区域为矩形区域。需要进一步对比区域外喷雾面积S与S的大小。若S较小,则以矩形的宽为轴建立的坐标系为最短的喷雾航程坐标系;若S较小,则以矩形的长为轴建立的坐标系为最短的喷雾航程坐标系。


式中S为喷雾航线平行于矩形的宽时,区域外喷雾面积,km2;S为喷雾航线平行于矩形的长时,区域外喷雾面积,km2;l为矩形的长,km;l为矩形的宽,km;0为施药作业区域面积,km2。
5)根据全覆盖规划方法规划出全覆盖路径。即在坐标系Z下,使喷雾航线平行于轴规划出的全覆盖航线为喷雾航程最短、多余覆盖率最小的航线。
2 航空施药航线规划系统设计
2.1 硬件
硬件设计需要满足信号的采集处理以及操作显示等功能的需求。本文采用杭州中科微电子有限公司生产的ATGM332D型号北斗导航模块实时采集飞机的飞行轨迹,该模块内置天线短路保护功能,跟踪灵敏度为−162 dBm,定位精度为2.5 m。采用3.97寸全视角IPS(In-Plane Switching)触摸屏和中国移动物联网公司开发的设备云App,实现对数据的输入与对坐标信息、喷幅、规划的航线和飞行航迹等信息的显示。采用GSM通信模块进行远程信号传输,通过OneNet物联网平台与手机、平板、PC机等移动终端设备连接,进行信息双向传输[31-34]。采用型号为STM32F103VET6的单片机作为微控制器,用于对信号进行综合处理,根据算法规划出最短全覆盖航线。多元传感器通过同步串行通信方式与微控制器进行数据交互,通信模块通过异步串行通信口与微控制器相连进行数据的双向传输。
该航线规划系统的安装位置及显示界面如图2所示。飞行员通过对比实际飞行轨迹和规划的航线,判断是否需要调整当前航向。

1.R44直升机仪表盘 2.航空施药规划装置 3.系统规划的喷雾航线 4.直升机飞行轨迹 5.直升机当前航向
2.2 软件
系统的软件算法包括2部分:根据式(6)~(8)确定最短的喷雾航程坐标系Z;在坐标系Z下规划出全覆盖喷雾航线。
全覆盖施药航线如图3所示,喷雾航线规划方法步骤为:1)在坐标系Z中,做轴的平行线,每条平行线相距0.5个喷幅,直到全部覆盖施药作业区域,其中奇数平行线即为喷雾航线。2)以偶数线与边界的交点为起点,向轴作垂线,交于最近的边界外的喷雾航线上。3)以各个顶点为起点,向轴作垂线,交于最近的边界外的喷雾航线上。4)取每个喷雾航线上最长的线段,为规划的喷雾航线。5)计算所有的喷雾航线的长度,即得到最短全覆盖航程。如图3所示。

注:ABCDE为施药作业区域,粗虚线为奇数平行线,细虚线为偶数平行线,粗实线为喷雾航线。
系统工作流程图如图4所示。
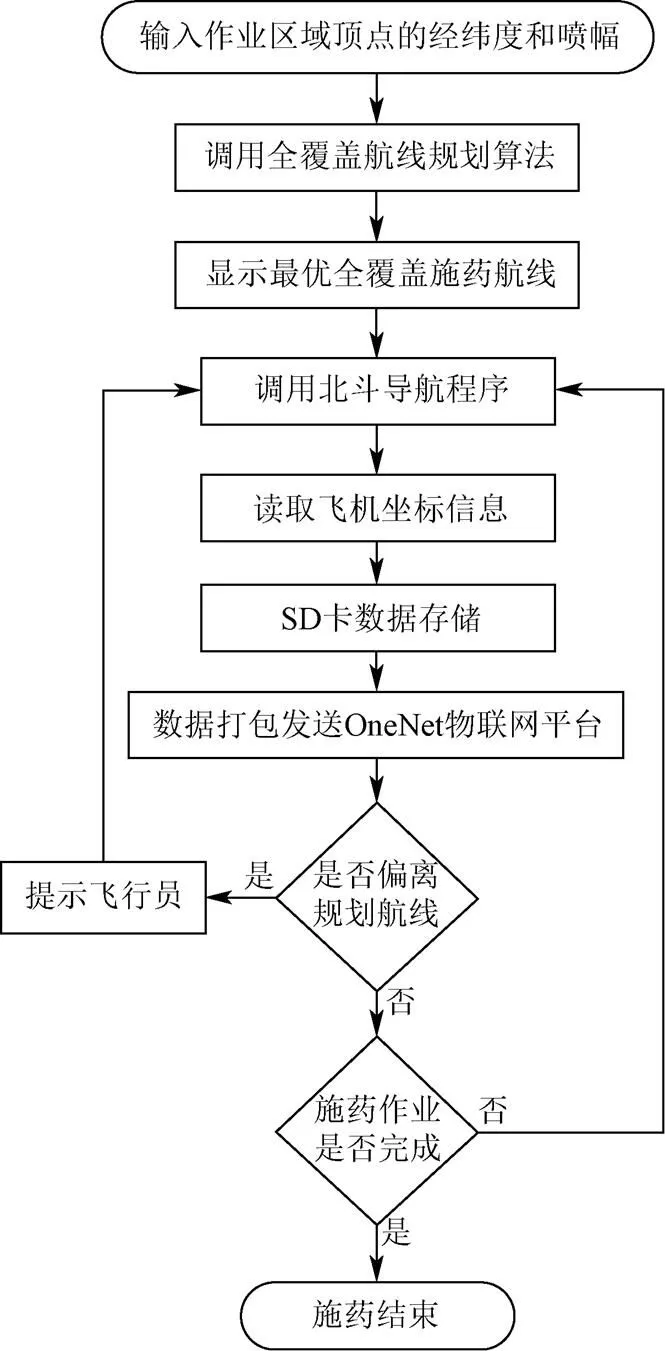
图4全覆盖航线规划系统工作流程图
3 材料与方法
3.1 试验设备与场地
试验使用罗宾逊直升机公司研制的型号为R44雷鸟系列直升机,平均油耗57L/h,林业施药作业飞行速度为90~160 km/h,本试验设置航速为120km/h,喷幅宽度为70m,药耗为10L/km[35]。试验时把本文研发的装置放置在驾驶室内,试验现场如图5所示。选取位于东经北纬地区的3处面积不同并且形状各异的试验场地,其中试验场地1为面积约1.101km2的矩形场地,如图6a所示,顶点经纬度分别是A1(117°30′0.00″,39°19′0.01″),B1(117°30′0.00″,39°18′35.23″),C1(117°30′59.98″,39°18′35.23″),D1(117°31′0.00″,39°19′0.01″)。
场地2为面积约1.765km2的任意四边形场地,如图6b所示,顶点经纬度分别是A2(117°36′58.67″,39°17′53.51″),B2(117°36′52.72″,39°17′19.72″),C2(117°38′14.78″,39°17′57.16″),D2(117°38′10.82″,39°18′26.33″)。
场地3为面积约4.17km2的任意多边形场地,如图6c所示,顶点经纬度分别是A3(117°29′30.89″,39°18′23.68″),B3(117°29′38.46″,39°17′8.95″),C3(117°30′39.73″,39°17′3.50″),D3(117°30′49.75″,39°17′29.33″),E3(117°30′44.64″,39°18′20.13″),F3(117°30′23.34″,39°18′26.60″)。

图5 试验现场

注:A1B1C1D1为矩形场地,A2B2C2D2为任意四边形场地,A3B3C3D3E3F3为任意多边形场地。
3.2 试验设计
以检验该算法规划的航线是否为最优的喷雾航线,即在施药作业区域内喷雾航程最短,覆盖范围最为精准的航线为试验目的,设置对照组和试验组。
对照组:系统先通过算法根据每处试验场地特点,规划出最短喷雾航程坐标系。再根据全覆盖喷雾航线规划方法,在坐标系下规划出最优的喷雾航线。此时航向角为0°,再按照规划的航线进行全覆盖喷雾作业。
试验组:由于施药区域在第一象限,航向角的变化范围在0°~90°,所以本文在最短喷雾航程坐标系下每间隔15°选取一个航向角,即分别选取15°、30°、45°、60°、75°和90°的6个航向角进行全覆盖喷雾作业,作为与0°航向角的对照试验。由于北斗导航存在误差,并且环境风速对直升机的航线影响较大,以及飞行员的驾驶技能无法保证完全按照规划航线飞行。因此为保证数据的准确性,需要多次试验,本文对每个航向角重复5次试验,记录每次试验的喷雾航程,取平均值为有效值,以提高数据的可靠性。
在全覆盖喷雾的前提下,喷雾面积越小,多余覆盖率越低,覆盖面积越精准,通过式(9)计算多余覆盖率。

式中为多余覆盖率,%;′为实际喷雾总航程,km。
4 试验结果与分析
R44直升机在3种试验场地上7个不同航向下的喷雾作业的航迹图如表1所示。

表1 R44直升机在3种试验场地上7个航向的喷雾作业航迹
从表1中可得,试验的实际航迹均存在偏移现象。是由飞行员驾驶技术、环境中的风向和风速不稳定以及北斗导航系统定位的误差造成的,但是试验组航迹偏移较大,航迹间距不稳定,漏施重施现象严重。而对照组的航迹偏移量少,航线间距较稳定,喷雾范围较精准。初步验证了该系统可以减少漏施重施现象,以及稳定航线间距提高覆盖的均匀性的效果。
4.1 航向角对航程的影响
由图7可知,在同一场地上,不同航向角对应的喷雾航程也有所不同。其中无论在哪种场地上,当航向角为0°时对应的喷雾航程都为最短。由于航向角为0°时的喷雾航线即为算法规划的喷雾航线,因此验证了该算法规划的航线是喷雾航程最短的全覆盖喷雾航线。

图7 不同场地下各航向角的喷雾航程
通过图中误差线可知,数据集的离散程度小,数值较接近平均值,数据可靠性较强。在场地1中,航程最小为16.055km,航程最大为20.975km。因此按照本文算法规划的航线作业,实际喷雾航程比未规划作业的航程最多可缩短4.92km。在场地2中,航程最小为27.022 km,最大为33.925km,最多可缩短6.903km。在场地3中,航程最小为59.913km,最大为68.71km,最多可缩短8.797km。由此可见施药作业区域的面积越大,航程缩短越明显,算法规划的航线优势越明显。
而喷雾航程的长短决定喷雾面积的大小,以及作业时长、能耗与药耗的高低等。喷雾航程越短,喷雾面积越小,作业时间越短,农药喷洒量越少。因此缩短喷雾航程可以最大程度降低作业成本,提高覆盖精准率。场地3中缩短8.797km航程,不仅节约时间,还节省了4.19 L航空汽油和88L农药,大大降低了作业成本。
4.2 航向角对多余覆盖率的影响
从图8可知,不同航向角对应的多余覆盖率有所不同。通过图中误差线可知,数据集的离散程度小,数值较接近平均值,数据可靠性较强。

图8 不同场地下各航向角的多余覆盖率
4.2.1 规则地形
图8中的场地1多余覆盖率先增大后减小,因为场地1为矩形(图6a),当航向角为0°时,喷雾航线平行于矩形的长即A1D1边;当航向角为90°时,喷雾航线平行于矩形的宽即A1B1边。而其他航向角的喷雾航线均不平行于边界线。所以从图8场地1数据分析可得出:平行于区域边界的多余覆盖率比非平行于边界的多余覆盖率小。通过式(9)可知多余覆盖率越小喷雾航程越短,因此验证了由式(6)得出的喷雾航线平行于边界线时,航程比非平行于边界线时短的推论。
虽然航向角为0°和90°时喷雾航线都平行于边界,但是航向角为0°时的多余覆盖率最小。验证了算法规划的航线为喷雾航程最短和多余覆盖率最小的航线。证明了前文推导出的喷雾航线平行于施药作业区域的边界时,可以得到最优航线的理论。
4.2.2 不规则多边地形
从如图8中场地2和场地3的分析可知,在不规则多边形中,随着航向角的增大,多余覆盖率的变化无明显规律。
在场地2中,当航向角为0°时多余覆盖率为7.17%,此时的多余覆盖率最小。当航向角为45°时多余覆盖率为8.67%,此时的多余覆盖率也较小。因为场地2近似为平行四边形(图6b),当航向角为0°时,喷雾航线平行于该四边形的B2C2边;当航向角为45°时,喷雾航线近似平行于场地2的A2B2;而其他航向角均不平行于边界。所以航向角为0°的航程最短,航向角为45°的航程较小,其他角度的航程较大。与本文理论分析内容相符合,验证了理论分析的正确性。
此外,当航向角为30°时和60°时的多余覆盖率较为接近,并且均大于航向角为45°的多余覆盖率。是因为航向角为30°和60°时,喷雾航线与A2B2边的夹角近似相同。因此可得航线与边界线存在夹角时,无论角度为正负均会增大多余覆盖率。
在场地3中,当航向角为0°时多余覆盖率为0.57%,此时的多余覆盖率最小。当航向角为75°时多余覆盖率为5.39%,此时的多余覆盖率也较小。是因为当航向角为0°时,喷雾航线平行于场地3的A3B3边,并且近似平行于E3D3边;当航向角为75°时,喷雾航线近似平行于B3C3边和F3E3边。而A3B3边的长度大于B3C3边和F3E3边的总长度。在场地2中,B2C2边的长度大于A2B2的长度,平行于B2C2边作业的航程比平行于A2B2边作业的航程小。
通过以上分析可进一步得出:在不规则施药作业区域中,当喷雾航线平行于施药作业区域最长的边界时,多余覆盖率最小。因此在作业过程中,尽可能使喷雾航线平行于作业区域最长的边界线,以使喷雾面积最精准,多余覆盖面积最小。
4.3 地形与面积对多余覆盖率的影响
场地1与场地2的作业面积接近,但是从图8可知,在航向角为0°时,场地2的多余覆盖率为7.17%,而场地1的多余覆盖率仅为2.08%。两处场地的区别在于,场地1的地形为规则四边形,而场地2的地形为不规则四边形,因此在规则地形上规划航线的多余覆盖率明显小于不规则地形。由于R44直升机单架次作业面积有限,并且需要起降平台,常常在对大面积林地作业时,需要对林地进行区域划分。因此在进行区域划分时,尽可能划分成规则的地形,可以减少多余覆盖面积,提高作业效率。
场地3的地形虽然为不规则多边形,但是其作业面积远远大于场地1、2,并且从图8可知,在航向角为0°时,其多余覆盖率为0.57%,小于场地1与场地2的多余覆盖率。因此在对林地进行区域划分时,尽可能划分大面积的规则地形,可以最大程度上减少多余覆盖面积,使覆盖的范围更为精准。
5 结 论
1)提出了航空施药全覆盖航线规划算法,该算法可以满足在施药作业区域被完全覆盖的前提下,规划出喷雾航程最短,多余覆盖率最小的作业航线。为航空施药航线规划技术的发展提供理论支撑。
2)通过试验验证了该算法的可行性,与试验组其他航向的作业航线相比,该算法规划的航线航间距稳定,覆盖范围精准,3种场地的最短喷雾航程分别为16.055、27.022、59.913km;最小多余覆盖率分别为2.08%、7.17%、0.57%,有效减少多喷、漏喷、重喷现象。验证了规则地形航线规划的范围精准性明显高于不规则地形;在不规则地形中,当喷雾航线平行于施药作业区域最长的边界线时,喷雾航程最短,喷雾范围最精准;作业区域面积越大,规划的航线覆盖范围越精准。该算法可以提高施药效率、减少成本和降低污染。
3)在进行施药作业区域划分时,应划分成大面积的规则地形。在对不规则地形作业时,使喷雾航线平行于最长的边界进行作业,可以最大程度上缩短航程,降低多余覆盖率,使覆盖范围最为精准。
[1]杨银布. 林业资源管理对林区可持续发展的影响[J]. 现代园艺,2019(10):152-153.
[2]赵新邦. 林业资源管理存在的问题及解决措施分析[J]. 现代农业2019(04):72-73.
[3]周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10.
Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[4]詹春明. 造林工程病虫害特点及处理办法[J]. 绿色科技,2016(5):123-124.
[5]张东彦,兰玉彬,陈立平,等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报,2014,45(10):53-59.
Zhang Dongyan, Lan Yubin, Chen Liping, et al. Current status and future trends of agricultural aerial spraying technology in China [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. (in Chinese with English abstract)
[6]陈盛德,兰玉彬,李继宇,等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报,2016,32(17):40-46.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Effects of small unmanned helicopter spray parameters on the distribution of canopy droplets in hybrid rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 40-46. (in Chinese with English abstract)
[7]Lan Y B, Chen S D. Current status and trends of plant protection UAV and its spraying technology in China[J]. Int J Prec Agric Aviat, 2018, 1(1): 1-9.
[8]Pathak R, Barzin R, Bora G C. Data-driven precision agricultural applications using field sensors and unmanned aerial vehicle[J]. International Journal of Precision Agricultural Aviation, 2018, 1(1):19-23.
[9]茹煜,金兰,贾志成,等. 无人机静电喷雾系统设计及试验[J]. 农业工程学报,2015,31(8):42-47.
Ru Yu, Jin Lan, Jia Zhicheng. Design and experiment on electrostatic spraying system for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(8): 42-47. (in Chinese with English abstract)
[10]陈盛德,兰玉彬,李继宇,等. 航空喷施与人工喷施方式对水稻施药效果比较[J]. 华南农业大学学报,2017,38(4):103-109.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Comparison of the pesticide effects of aerial and artificial spray applications for rice[J]. Journal of South China Agricultural University, 2017, 38(4): 103-109. (in Chinese with English abstract)
[11]周志艳,明锐,臧禹,等. 中国农业航空发展现状及对策建议[J]. 农业工程学报,2017,33(20):1-13.
Zhou Zhiyan, Ming Rui, Zang Yu, et al. Development status and countermeasures of agricultural aviation in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 1-13. (in Chinese with English abstract)
[12]李会,李玉荣,许斐斐,等. R44直升机飞防春尺蠖技术研究[J]. 山东林业科技,2014,44(5):82-85.
Li Hui, Li Yurong, Xu Feifei, et al. R44 Helicopte control apocheima cinerari technology research. Journal of Shandong Forestry Science and Technology, 2014, 44(5): 82-85. (in Chinese with English abstract)
[13]邓铁军,白先进,廖宪成,等. R44型直升机喷雾防治柑橘木虱的效果初报[J]. 植物保护,2018,44(4):226-229.
Den Teijun, Bai Xianjin, Liao Xiancheng, et al. Control effect of spraying pesticides by R44 helicopter against diaphorina citri[J]. Plant Protection, 2018, 44(4): 226-229. (in Chinese with English abstract)
[14]包瑞,茹煜,朱传银,等. 固定翼飞机喷雾作业雾滴飘移规律研究[J]. 林业工程学报,2018,3(2):129-135.
Bao Rui, Ru Yu, Zhu Chuanyin, et al. Study on spray droplet drift pattern based on fixed-wing aircraft[J]. Journal of Forestry Engineering, 2018, 3(2): 129-135. (in Chinese with English abstract)
[15]Jacopo P, Salvatore Filippo D G, Edoardo F, et al. A flexible unmanned aerial vehicle for precision agriculture[J]. Precision Agriculture, 2012, 13(4): 517-523.
[16]秦维彩,薛新宇,周立新,等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报,2014,30(5):50-56.
Qin Weicai, Xue Xinyu, Zhou Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 50-56. (in Chinese with English abstract)
[17]张铁,董祥,尹素珍,等. 轻便型高地隙喷杆喷雾机大豆田间施药试验[J]. 农业机械学报,2016,47(S):182-188.
Zhang Tie, Dong Xiang, Yin Suzhen, et al. Spraying performance of lightweight high clearance boom sprayer in soybean field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S): 182-188. (in Chinese with English abstract)
[18]李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2018,34(12):104-118.
Li Jiyu, Lan Yubin, Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[19]Yao P, Wang H, Su Z. Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs[J]. Aerospace Science & Technology, 2016, 54: 10-22.
[20]Ramana M V, Varma S A, Kothari M. Motion planning for a fixed-wing UAV in urban environments[J]. IFAC-Papers Online, 2016, 49(1): 419-424.
[21]谭雁英,唐伟贤. 基于参考点法的无人机跟踪目标导引策略设计[J]. 西北工业大学学报,2020,38(1):176-182.
Tan Yanying, Tang Weixian. Guidance strategy for UAV tracking target based on reference point guidance method[J]. Journal of Northwestern Polytechnical University, 2020, 38(1): 176-182. (in Chinese with English abstract)
[22]刘芳,孙亚楠,王洪娟,等. 基于残差学习的自适应无人机目标跟踪算法[J/OL]. 北京航空航天大学学报:1-12 [2020-03-27]. https://doi.org/10.13700/j.bh.1001-5965.2019.0551.
Liu Fang, Sun Yanan, Wang Hongjuan, et al. Adaptive UAV target tracking algorithm based on residual learning[J/OL]. Journal of Beijing University of Aeronautics and Astronautics: 1-12 [2020-03-27]. https://doi.org/ 10.13700/j.bh.1001-5965.2019.0551. (in Chinese with English abstract)
[23]汪沛,罗锡文,周志艳,等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报,2014,30(18):1-12.
Wang Pei, Luo Xiwen, Zhou Zhiyan, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 1-12. (in Chinese with English abstract)
[24]曹光乔,张庆凯,陈聪,等. 基于多目标优化的飞防队作业调度模型研究[J]. 农业机械学报,2019,50(11):92-101.
Cao Guangqiao, Zhang Qingkai, Chen Cong, et al. Scheduling model of UAV plant protection team based on multi-objective optimization[J].Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(11): 92-101. (in Chinese with English abstract)
[25]Popescu D, Stoican F, Ichim L. Control and optimization of UAV trajectory for aerial coverage in photogrammetry applications[J]. Advances in Electrical and Computer Engineering, 2016, 16( 3) : 99-106.
[26]Marina Torres, David A. Pelta, José L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451.
[27]徐博,陈立平,谭彧,等. 多架次作业植保无人机最小能耗航迹规划算法研究[J]. 农业机械学报,2015,46(11):36-42.
Xu Bo, Chen Liping, Tan Yu, et al. Path planning based on minimum energy consumption for plant protection UAVs in sorties[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 36-42. (in Chinese with English abstract)
[28]徐博,陈立平,谭彧,等. 基于无人机航向的不规则区域作业航线规划算法与验证[J]. 农业工程学报,2015,31(23):173-178.
Xu Bo, Chen Liping, Tan Yu, et al. Route planning algorithm and verification based on UAV operation path angle in irregulararea[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 173-178. (in Chinese with English abstract)
[29]黄小毛,张垒,Tang Lie,等. 复杂边界田块旋翼无人机自主作业路径规划[J]. 农业机械学报,2020,51(3):34-42.
Huang Xiaomao, Zhang Lei, Tang Lie, et al. Path planning for autonomous operation of a drone in fields with complex boundaries[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(3): 34-42. (in Chinese with English abstract)
[30] Yao W X, Lan Y B, Wen S, et al. Evaluation of droplet deposition and effect of variable-rate application by a manned helicopter with AG-NAV Guía system [J]. International Journal of Agricultural and Biological Engineering, 2019, 12(1): 172-178.
[31]Debiao H, Zeadally S, An analysis of RFID authentication schemes for internet of things in healthcare environment using elliptic curve cryptography[J]. Ieee Internet of Things Journal, 2015, 2(1): 72-83.
[32]Sebastian S, Petors S. Wireless technologies for smart agricultural monitoring using internet of things devices with energy harvesting capabilities[J]. Computers and Electronics in Agriculture, 2020, 172: 105338.
[33]Liu Yalin, Dai Hongning,Wang Qubeijian, et al. Unmanned aerial vehicle for internet of everything: Opportunities and challenges[J]. Computer Communications, 2020, 155: 66-83.
[34]Zhou Yushan, Liu Liu, Xie Chengjun, et al. An effective automatic system deployed in agricultural internet of things using multi-context fusion network towards crop disease recognition in the wild[J]. Applied Soft Computing Journal, 2020, 89: 106128.
[35]张瑞瑞,李杨,伊铜川,等. 有人直升机变量施药控制系统的设计与试验[J]. 农机化研究,2017,39(10):124-127.
Zhang Ruirui, Li Yang, Yi Tongchuan, et al. Design and experiments of control system of variable pesticide application for manned helicopter[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 124-127. (in Chinese with English abstract)
Algorithm for planning full coverage route for helicopter aerial spray
Liu Yangyang, Ru Yu※, Liu Bin, Chen Xuyang
(,,210037,)
At present, there is redundancy in the route of helicopter spray, which leads to waste of fuel and pesticides, and serious environmental pollution and high spray cost. In order to improve the aerial spray efficiency and avoid the phenomenon of overspray, missed spray and respray in the process of aerial spray, and solve the problem of inaccurate coverage was caused, the optimal full coverage route planning method was proposed and the corresponding device was developed. Firstly, Based on the analysis of previous research on the full coverage path planning technology of aerial spray, full coverage spray route planning for R44 helicopter was studied, a set of shortest spray voyage and the most accurate full coverage route planning algorithm for aerial spray was developed. The optimal full coverage route planning method showed that the longer the spray route, the larger the spray area and the larger the pesticide consumption. Therefore, under the premise of full coverage, the shortest distance of spray route can ensure the most accurate coverage. Under the premise of without repeated spray, to ensure full coverage of the spray area, the spray route needs to be beyond the boundary of the spray area. Moreover, the excess spray area was reduced by reducing the length of spray route outside the boundary. Based on the principle of full area coverage, the spray voyage of outside the spray area was calculated and analyzed to obtain the shortest spray voyage calculation formula on the premise of full coverage, and draw the conclusion that the spray voyage was shorter when the boundary of the spraying region was parallel to the-axis of the coordinate system. Furthermore, each boundary was taken as the-axis to establish the coordinate system, and the shortest coordinate system of spray voyage could be obtained through the calculation formula of spray voyage. Then combined with the full coverage route planning method, the optimal full coverage routes according to different operating environments were achieved. Therefore, under the premise of full coverage of the spraying area, the spray voyage was the shortest and the coverage was the most accurate. Real-time monitoring of flight track was realized through designing of software and hardware, and information was transmitted bidirectional between plane and mobile terminal through OneNet IoT platform. Seven full coverage spray experiments with different course were carried out on three different terrain sites with different areas of rectangle, arbitrary quadrilateral and arbitrary polygon. The experiments results showed that the spray voyages of the planned course was the shortest and the redundant coverage was the least among the three test sites. The distance can be shortened by 4.920, 6.903, 59.913 km than other courses spray voyages in the three test sites; the minimum redundant coverage was 2.08%, 7.17%, and 0.57%, respectively. With the increase of spray area, the shorter the voyage was, the less redundant coverage was. And the redundant coverage of regular terrain of route planning was obviously less than that of irregular terrain. The full coverage route planning algorithm proposed in this paper can provide theoretical support for the development of aerial route planning technology and provides guidance for actual spray operations.
route planning; aerial spray; full coverage routes; R44 helicopte
刘洋洋,茹煜,刘彬,等. 直升机航空施药全覆盖航线规划算法[J]. 农业工程学报,2020,36(17):73-80.doi:10.11975/j.issn.1002-6819.2020.17.009 http://www.tcsae.org
Liu Yangyang, Ru Yu, Liu Bin, et al. Algorithm for planning full coverage route for helicopter aerial spray[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(17): 73-80. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.17.009 http://www.tcsae.org
2020-05-20
2020-08-05
国家重点研发计划项目(2018YFD0600202-04);江苏省研究生科研与实践创新计划项目(KYCX18-0969)
刘洋洋,主要从事农林植保技术与装备研究。Email:GWGLYY@163.com
茹煜,教授,博士生导师,主要从事农林植保技术与装备研究,Email:superchry@163.com
10.11975/j.issn.1002-6819.2020.17.009
S252+3
A
1002-6819(2020)-17-0073-08