基于单片机超声波测距仪的硬件设计
2020-10-20宋艳芳鹿传架柳娜
宋艳芳 鹿传架 柳娜

摘要:随着技术的发展,利用超声波技术测量距离将会变的十分重要。本文设计是基于51系列单片机系统,以超声波传感器来测量系统到前后方物体的距离,然后根据超声波传感器反射回来的信息分析出结果,并做出处理,并将处理后的数据在 LED 屏上显示出来。
关键词:单片机;超声波;测距
随着我国的科技水平的上升,超声波测量技术被广泛的推广,应用在各种测量距离的领域中。由于自身优点比如:抗干扰性强、反射性好、方向性强等,人们慢慢当作成一种测量识别的手段。物体到障碍物的距离是由超声波测距传感器的两探头之间的接受和发射工作时的相差的时间进行计算的,超声波传播速度与在特定的范围内与频率无关,与被测目标也没有关系。该文在已有的理论知识基础上,设计一种测距仪使用超声波技术并利用单片机技术作为核心进行一定范围内的距离实测。该系统测量距离的方法是采用测量距离的模块 HC-SR04使得系统与物体之间不接触的手段实现的,并且以 STC89C51单片机作为限制 HC-SR04发射的脉冲来测量距离的核心。对交通运输业和工业等方面都应用广泛。
1. 电路总体方案设计
超声波测距系统是由被测的物体从超声波发射电路接收到发射出的超声波,然后发射回来的超声波被接收电路接收,超声波在物体与测量仪之间的传播时间是由单片机中的定时器进行计算和记录的。因此,被测的物体与测距仪间的距离是通过单片机的函数运算功能得出的。
2. 硬件设计
2.1 发射电路与接收电路
本次设计的内电路是由单片机的作用产生的,并且由于将具有优异的频率稳定性的晶体振荡器用作系统时钟,因此稳定性非常高。结果,驱动信号也相对稳定,当程序的编制不同时,就可以获得的输出频率不同。电路在不同强度值下,可以作为判断物体的基础,所以要想设计的成功选起点是必须要做到十分精确的。当距离小于设定值时报警。当系统启动示波器时,单片机开始在内部运行程序。
2.2 显示电路
显示电路中采用8155芯片用来给单片机做扩展。其中用来显示二极管亮度程度的端口选用PA 端口,用来控制发光二极管的端口采用 PC 端,除此之外,还要有一个双极的发光二极管。驱动电流较大,并且使用六向反作用驱动器74LS06来提高驱动能力。
2.3 报警电路
在整个系统中的报警部分是由运算放大器和喇叭,LED 灯组成。电阻的阻值分别为1千欧的和10千欧的两种,运算放大器是采用型号为 F007的芯片,并且在电路中采用负反馈的方式连接,也就是反比例运算放大电路。
2.4 系统复位电路
对于上电复位电路,它必须位于每台单芯片计算机中。用于初始化微控制器,等效于再次打开单片机电源。除正常的初始操作外,由于操作错误,系统会锁定。增加此模块的 RST 可使您从当前状态恢复。如果程序运行不正确,则可以使用相同的方法。
2.5 晶振电路
如果要想系统电路的工作不出现问题,必须要有晶振电路才能保证系统无故障运作。若没有晶振电路或者晶振电路损坏,系统将会出现故障,故而系统不正常。它由两个晶体振荡器和陶瓷电容器组成,并且晶体振荡器和陶瓷电容器不是正值或负值,一定要将两瓷片电容的那段接地。
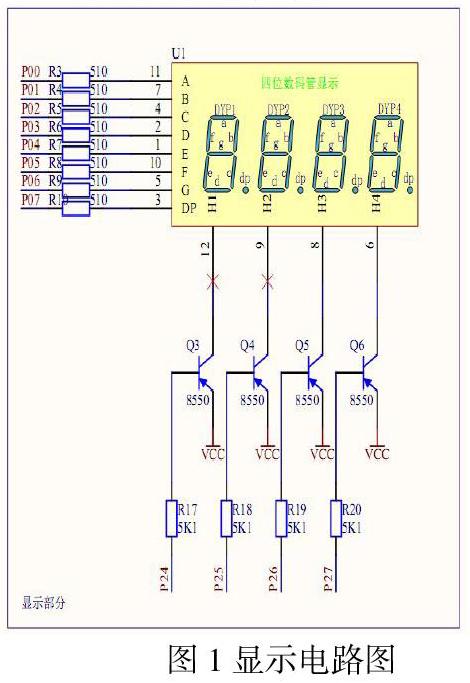
2.6 LED 数码管显示电路
该电路的显示模块由4位7段 LED 数字管组成,用來显示测得的电压值。它是一个公共阳极数字管,数码管的 a,b,c,d,e,f,g 端接到 dp 端子上,把信息传输到单片机内,由 P1端口把收到信息转而处理成显示代码。以接收由单片机的 P1端口生成的显示段代码。 S1,S2,S3,S4引脚端是位选择端,用于接收在单片机的 P2端口上生成的位选择代码。
2.7 蜂鸣器和LED 报警
蜂鸣器的工作电压信号比平常的电压信号高,若要使蜂鸣器工作就要与电压放大器相接。故采用 PNP 型的三极管。LED电路由发光二极管和电阻组成,LED 通常工作在5ma 至20ma 之间,因此选择1千欧电阻来限制电流。
2.8 按键设置电路
单片机键盘有两种类型:独立键盘和矩阵键盘。独立键盘就是与其他元件都不相连,按键的两端一端连接在单片机的 I/O 端口,另一端接地,独立键盘的连接简单明了,并且稳定。矩阵键盘相对于独立键盘来说连接复杂,易出错。根据两键盘的特点,要满足要求故选择独立键盘。
3. 结论
通过系统硬件调试:系统中各个电路通过焊接方式连接在一块后,首先检测每个模块是否在安装的过程中损坏。单片机的每个引脚与模块之间是不是安装正确,如果相对应的数据传输引脚没有完成合理的接通,那么在后期软件逻辑处理的时候不能得到关键的数据值,那么对于整个系统的软件错误排查就不能方便快速的找到对应的问题,然后检查设备的规格和极性是否有错误。在以上都完好的情况下,在检查电源与设备连接有没有短路。通过测试,验证硬件设计较合理,达到预期目标。
参考文献:
[1] 陈军俊.基于 Arduino 技术的六足机器人声呐测距功能设计与实现[J].电脑知识与技术:学术交流,2018(5):12-14.
[2] 陈蔚. 超声波测距仪的设计和实现 [J]. 数字技术与应用,2018(5):23-24.
[3] 贺洪江,程琳.基于 STM32与MODBUS 协议的超声波测距仪设计[J]. 仪表技术与传感器,2014(11):23-30.
[4] 蒋鹏,张春艳,朱芙菁.基于 STM32F103控制的——多路无线通信超声波测距仪设计[J].科技风,2017(14):3-8.
[5] 李杰.基于单片机的超声波测距报警系统的设计[J].数字技术与应用,2018(09):17-18.
