基于改进型模糊神经网络的污水处理溶解氧内模控制
2020-10-15马海涛陈兆波
马海涛 宁 楠 陈兆波
1(长春工业大学电气与电子工程学院 吉林 长春 130012) 2(大连民族大学环境与资源学院 辽宁 大连 116600)
0 引 言
污水生化处理过程中,溶解氧(Dissolved Oxygen,DO)浓度是较为重要的控制参数[1],其控制难点在于污水处理过程涉及机理繁琐的生化反应,导致溶解氧控制具有大时变和非线性特性[2-3],并且由于实际运行工况多,进水流量、污染物浓度等干扰组分无法准确测量,增加了系统的不确定性,使污水处理过程处于非稳定状态[4-6]。
传统内模控制方法(Internal Model Control,IMC)[7]拥有结构简单、易于在线调节等优点,但只有一个可调参数,是一种一自由度控制器,参数整定时一般要在系统的干扰抑制性能和设定值跟踪性能之间折中选择,导致此方法较难获得理想的控制效果[8-9]。利用神经网络强大的非线性逼近特性,文献[10-11]采用模糊神经网络(Fuzzy Neural Network,FNN)对生物膜污水处理过程的曝气量进行控制,取得了良好的控制效果。但由于网络结构固定,导致其很难适应复杂多变的环境,进而影响学习收敛速度与自适应能力[12]。
为了确保污水处理系统的线性控制,本文采用一种改进模糊神经网络的二自由度内模控制策略,通过模糊控制器的输出在线修正反馈滤波器参数,并利用结构增减算法优化网络结构,实现规则层神经元动态优化,在线获取一个结构紧凑、泛化性能好的网络。由于实际的污水处理过程始终处于动态变化之中,出水水质受多源干扰影响,如异养微生物、氨氮等,实时、高效地对干扰进行抑制,从而使被控量不受扰动的影响,是工程控制的核心问题。因此,本文采用针对不可测干扰的内模控制器,并结合自适应模糊神经网络算法,实现复杂工况下溶解氧浓度目标值的精确跟踪控制,克服了由于参数变化和入水干扰对系统产生的影响,保证出水水质,节约运行成本。
1 污水处理溶解氧浓度建模
本文选择模拟效果预测能力强的活性污泥1号模型(Activated Sludge Model1,ASM1)来模拟生物反应过程,依据ASM1模型机理方程、溶解氧物料平衡公式,选取控制量为曝气电压量,被控量为溶解氧浓度,得到变参数数学模型为:
(1)
式中:X为混合液中微生物浓度;S为出水底物浓度;Si是流入污水中的有机物浓度;O为溶解氧浓度;YNH为产出率;Q是流入量;Qw是污质的流量;C是二沉池浓度因子;η是联系有机物与需氧量的一个因子;fx是消耗因子;ld是自衰减系数;μH是异养菌增长速度;δ是对溶解氧设置的冲量系数。
根据某污水处理厂的水质特点及ASM1模型参数选取的参考范围,得出本文研究对象的数学模型如下:
(2)

对式(2)进行拉普拉斯变换得出数学模型的传递函数为:
(3)
2 系统设计
2.1 系统结构
针对污水处理过程具有非线性、干扰不可测等特性,设计一种改进型模糊神经网络的二自由度内模控制器。将控制量偏差和偏差变化率作为网络输入,利用网络的输出在线整定滤波器参数α1和α2,并利用结构增减算法优化网络结构,通过引入动量项的梯度下降法逐步对误差进行消除,既增强了干扰抑制特性,也实现了溶解氧目标值追踪。图1为污水处理控制系统结构图。

图1 基于FNN的污水处理内模控制系统

2.2 IMC控制器设计
在图1中,控制器C1的作用是调整系统的目标值跟踪特性,C2的作用是调整干扰抑制特性和鲁棒性,使系统达到稳定状态,实现最优化。根据内模控制器结构可得:
(4)

y(s)=Q1(s)GP(s)r(s)+
[1-Q2(s)GP(s)]d(s)
(5)
上述公式显示:系统数学模型完全无误时,C1、C2单独进行控制。

(6)
F1(s)=1/(α1ns+1)n
(7)
式中:α1代表滤波器参数,对其进行整定以使系统稳定性与跟踪效果达到最优;F1(s)为一阶低通滤波器。
(2)控制器C2设计。为使系统具有较强的抗干扰特性与鲁棒性,在加入干扰和数学模型失配情况下设计C2。假如系统存在扰动与模型失配,则控制系统可能导致稳态性能较差,无法达到预期效果。因此,为使系统能够同时实现抗干扰性能与设定输出值跟踪性能,在反馈回路中增加内模控制器C2:
(8)
F2(s)=1/(α2ns+1)n
(9)
式中:α2为滤波器参数,对其整定以使系统鲁棒性与抗干扰性能实现最优化;F2(s)代表一阶反馈滤波器。
2.3 改进型模糊神经网络
本文采用的模糊神经网络包括输入层、推理层、规则层和输出层,其网络结构如图2所示。

图2 模糊神经网络结构
输入层:将x=[e,ec]T作为输入值直接传递给下一层。
推理层:选用高斯型函数。
(10)
式中:i=1,2,…,n,j=1,2,…,m,m为隶属度函数层神经元个数;σij和cij分别代表对应的隶属度函数的宽度和中心。
规则层:该层的每一节点的输出可以表示为模糊规则的激活强度。
(11)
式中:j=1,2,…,p,p代表规则层神经元数,即模糊规则数。
输出层:其功能是去模糊化,实现清晰化计算。
(12)
式中:wj代表规则层和输出层之间的连接权值;y代表模糊神经网络输出值。
2.3.1结构修剪算法
为防止网络结构过度增长导致学习收敛速度与能力下降,本文根据神经元活跃强度,采取一种在线修剪网络结构方法。修剪评价指标定义如下:
Is(t+1)=Is(t)exp(τ)
(13)
式中:Is代表神经元的激活强度;τ表示衰减常数。
若当前规则层神经元的激活强度Is小于预设的修剪阈值Isth,则对神经元进行删减,参数更新如下:
(14)
(15)
(16)
(17)

2.3.2结构增长算法
采用激活强度作为结构增长的判断准则,若输入数据难以被当前规则完全高效覆盖时,即拟定的增长临界值大于全部数据对神经元的激活强度,此时为满足环境变化需要增添规则。增长评价指标定义为:
(18)
式中:Ig为增长指标;j=1,2,…,r。
若满足增长条件,即增长指标Ig小于Igth预设的增长临界值时,新增神经元参数如下:
σnew=σg
(19)
(20)
(21)
式中:σg、cg分别为更新后神经元的宽度与中心;yr和y分别表示当前训练样本的期望输出和网络输出;增加神经元的参数为σnew、cnew、wnew,与当前欧氏距离最小的神经元为g;x(t)为当前输入样本。
2.4 控制器参数优化
模糊神经网络运用引入动量项的梯度下降法,使系统获得拥有较优参数的模糊神经网络模型。网络学习的目标函数为:
(22)
运用梯度下降法建立内部模型网络权值系数及形状参数,各参数更新公式如下:
(23)
(24)
(25)
α1和α2在线整定过程为:依据e、ec数值大小整定滤波器参数。当e较大时,为使系统溶解氧输出快速跟踪目标值,此时取较小参数值;当e较小时,为避免系统产生震荡以及超调等现象,参数应取较大值。若系统响应跟踪目标值迟缓,取适中参数值以提升响应速度。
根据上述分析,FNN规则自适应调整流程为:
1)将推理层宽度、中心和输出权值参数初始化,设置初始DO设定值、学习率η、修剪阈值Isth、增长阈值Igth,规则层神经元数初始值为3。
2)利用基准仿真模型1号(BSM1)的持续14天仿真数据对神经网络进行训练,并依据式(22)-式(25)更新推理层参数值。网络输入为设定值和系统输出间的误差与误差变化率,运用式(10)-式(12)计算此刻网络输出。
3)利用式(13)计算神经元最大激活强度,从而判定该神经元是否满足增长指标,若满足,则增长神经元个数,根据式(19)-式(21)设置新增神经元的宽度、中心与权值参数;否则,前往步骤4)。
4)依据修剪指标判断规则层神经元是否满足删减条件,若满足,则删除当前规则。神经元参数更新如式(14)-式(17)。
5)若数据训练完毕,则结束循环;否则,前往步骤2)进行重复训练。
2.5 控制器性能评估
本文利用平方偏差积分ISE、绝对偏差积分IAE与最大绝对偏差DEVmax指标评估控制器的系统性能,分别体现了控制系统的瞬态响应、平稳性和抗干扰能力。定义如下:

(26)
(27)
DEVmax=max|ei|
(28)
3 系统仿真
3.1 仿真平台
本文选择基准仿真模型1号(BSM1)作为仿真平台,该模型由欧盟科学技术合作组织(COST)和国际水协(IWA)合作共同提出,图3为BSM1总体结构图。
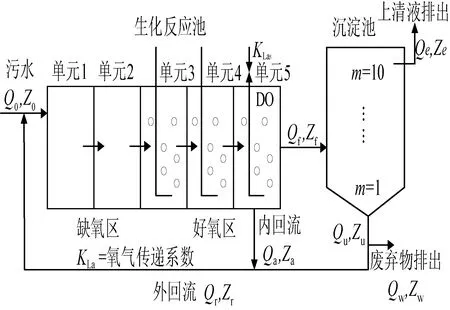
图3 BSM1总体结构
该模型为检测污水处理过程控制方法与策略提供了一个验证平台。生化反应池包含5个单元,二沉池为十级分层结构。在BSM1中,通过调节生化反应池第5分区KLa,来实现DO浓度的精确控制。
3.2 仿真结果分析
为验证改进型模糊神经网络内模控制策略对DO控制的有效性,选取BSM1中的数据文件进行仿真。针对前7天的数据建立数学模型,在7~14天进行仿真研究,采样时间为14天,DO浓度目标值为2 mg/L。进水流量如图4所示,进水中异养微生物Xbh、氨氮Snh和易降解悬浮颗粒物Ss如图5所示。可以看出污水处理过程具有非线性、大时变特征。

图4 进水流量

图5 进水污染物浓度
本文分别对设定值跟踪的内模控制、传统PID控制与模糊神经网络内模控制(FNN-IMC)进行系统仿真分析与比较,FNN参数采用试错法确定如下:η=0.01,Igth=0.8,Isth=0.1,PID的比例、积分和微分系数分别为180、13和2,仿真结果如图6所示。图7为FNN-IMC控制器的跟踪误差。图8给出了在控制过程中规则层神经元数的变化情况。

图6 不同控制器仿真曲线对比图

图7 FNN-IMC误差曲线
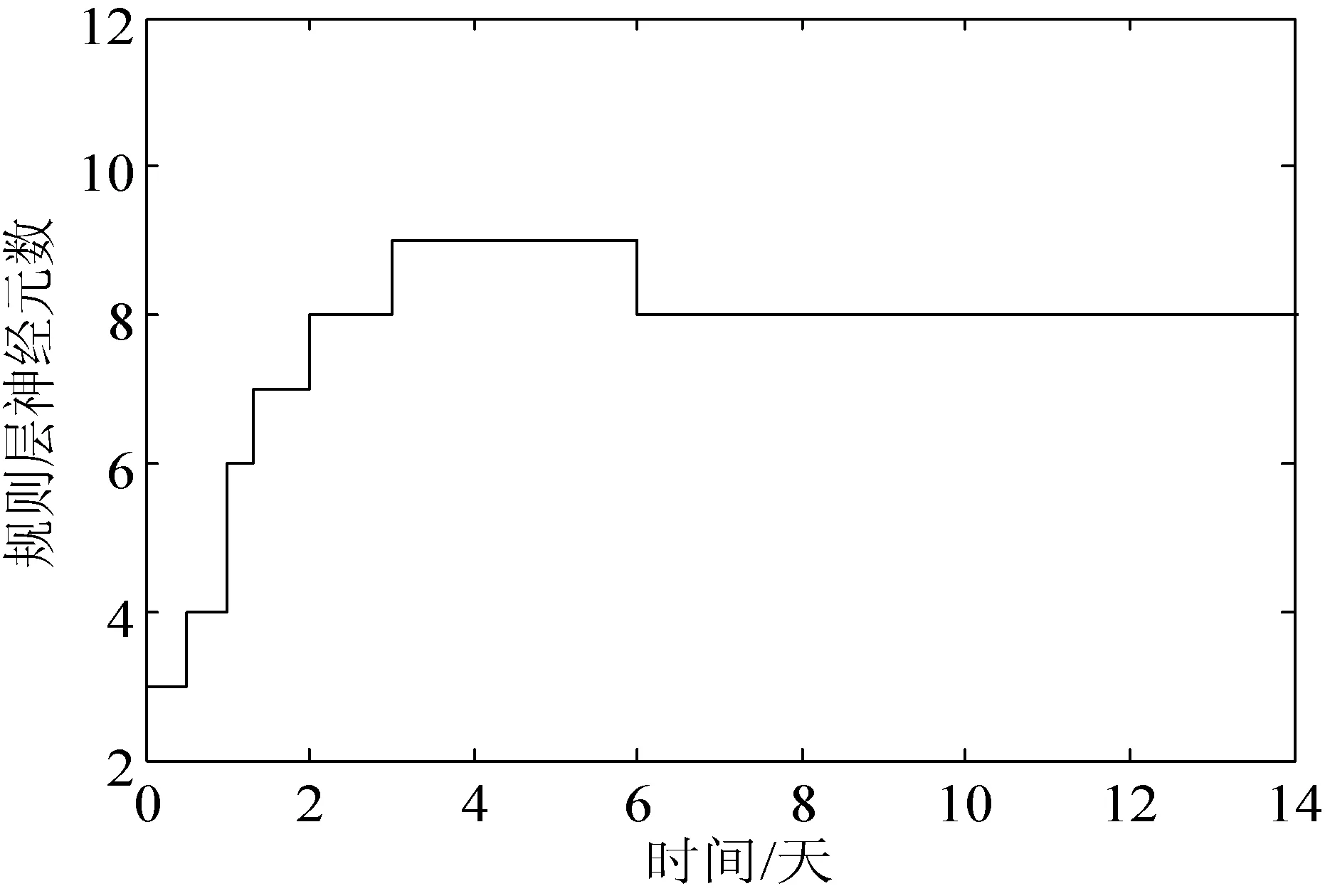
图8 规则层神经元变化情况
设定值跟踪仿真曲线表明,FNN-IMC控制器稳定性好、抗干扰性强,控制效果明显优于IMC和PID控制策略。由图7可以看出,控制器误差主要在±1×10-3/mg/L-1上下波动,控制器精准度较强。在神经元变化趋势曲线中,控制器网络结构数量保持在8个,体现了结构增减算法的有效性,使网络结构更加紧凑、精确。
表1给出了FNN-IMC、IMC、PID控制策略下的控制性能对比。通过与其他2种控制器的性能指标比较,可以看出FNN-IMC控制对DO浓度的控制效果显著。
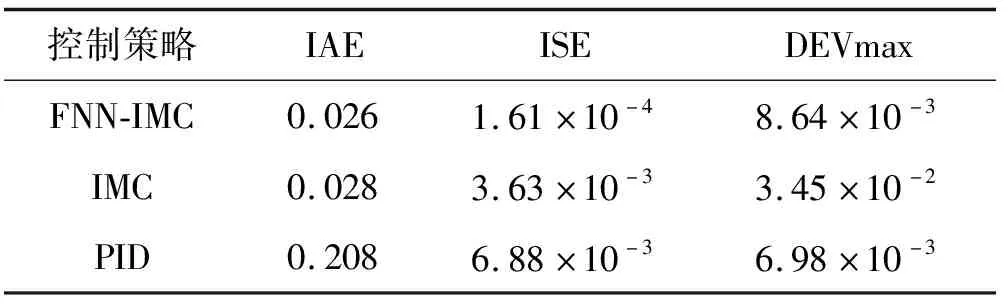
表1 不同控制策略性能比较
当系统模型失配时,为验证FNN-IMC的抗干扰能力与稳定性,在9~13天给出暴雨干扰,图9为在干扰作用下不同控制器设定值跟踪效果对比图。可以看出,在模型失配以及暴雨强干扰复杂工况下,FNN-IMC控制器对于溶解氧控制鲁棒性强,超调量小,抗扰性能更好,具有较强的跟踪效果。

图9 溶解氧控制效果
为检验控制器应对突发状况时的跟踪能力以及稳态性能,将DO浓度设定在1.8~2.2 mg/L范围内阶跃变化,控制效果如图10所示。规则层神经元数变化曲线如图11所示。

图10 阶跃变化下稳定性测试

图11 输出阶跃变化下规则层神经元变化情况
可以看出,当改变DO期望目标值时,FNN-IMC控制器仍然具有精确跟踪DO浓度的能力,稳态性能较好。神经元变化趋势曲线说明,在系统阶跃下,FNN-IMC控制器仍具有自适应调整网络结构的能力。
表2给出了输出阶跃变化下不同控制器性能比较结果,相比常规控制器,FNN-IMC的3个指标提升了近1个数量级,说明通过在线调节规则层结构,FNN-IMC控制器能够满足大时变系统的高需求,具有较强的控制精度与自适应能力。

表2 不同控制策略性能比较
4 结 语
由于污水处理过程中DO浓度受各种组分干扰导致其浓度无法准确测量,本文采用一种改进型模糊神经网络二自由度内模控制方法,通过改进型模糊神经网络实时在线调节滤波器参数,并运用结构增减算法在线动态增减规则层神经元,改善了控制系统的控制效果。在国际基准仿真平台BSM1的仿真结果表明,对于DO浓度跟踪控制,FNN-IMC控制系统具有良好的目标值跟踪特性和干扰抑制特性,能够满足复杂工况下实现高效稳定工作的需求。
