两轮移动巡检机器人的区间二型模糊滑模控制
2020-10-15毛雅洁刘佳豪
陈 瑶 毛雅洁 赵 涛 刘佳豪
(四川大学 四川 成都 610065)
0 引 言
1986年,日本的Kazuo Yamafuji教授制作了最早的自动站立式两轮机器人[1];2001年,美国发明家迪恩·卡曼发明了电动代步工具Segway[2],该机器人采用了模糊控制方法,可通过控制车体上方的方向传感器实现机器人的转弯,为代步两轮自平衡机器人在生活中的应用打下基础;2002年,丹麦Lego公司的Steve设计出一款玩具型两轮自平衡机器人LegWay[1],采用光电接近探测器实现机器人的平衡控制,并在此前提下,实现轨迹跟踪;同年,瑞士的研究人员研制出一台借助陀螺仪和加速度计来采集倾角信息的两轮移动机器人,可以实现U形和零半径回转[1];2008年,美、日公司合作推出了可播放音乐还可以在跟踪模式下追随人运动的AMP(Automatic musical personality)两轮机器人;美国学者David P.Anderson教授独立设计的两轮机器人nBot[14]采用模糊控制方法,能够使两轮机器人保持平衡。
国内的科学家也在积极研究两轮移动机器人,并取得了一些成果。中国科学研究院自动化所研发并研制CASIA-I智能移动机器人通过多传感器信息融合技术,可以实现语音会话功能[1]。2003年,中国科学技术大学研制出一种两轮代步电动车,采用了三维动力学的倒立摆控制原理[3],可使机器人在多种运行状态下保持平稳,如前进、后退、转弯和刹车。2005年,哈尔滨工程大学尹亮制作了由上位机和车体共同构成的自平衡机器人Sway[3],采用的双轴加速度传感器和红外传感器能够提高检测精度,可靠的数据采集和独特的算法有助于机器人平稳运行。
以两轮移动巡检机器人为对象,主要进行自平衡控制和轨迹跟踪控制。目前,根据机器人模型的线性化和非线性化,控制方法也分为线性控制、非线性控制和智能控制。传统的线性控制方法有PID算法、LQR算法[1,4]以及极点配置法等,一般都基于状态反馈,其设计简便,相对容易实现。然而由于两轮移动巡检机器人本身是具有非线性及强耦合等多种特性的系统,线性化的处理必然会产生系统的抗干扰能力下降、控制范围缩小以及控制效果不佳等问题[1]。非线性控制或智能控制[1]主要有backstepping控制[5]、滑模变结构控制[6]、模糊控制[7]、神经网络控制[8]等。与传统线性控制相反,其设计复杂,在物理上往往难以实现,但能够有效地增加控制范围且鲁棒性更好,控制效果更优。
模糊控制是以模糊集合论、模糊语言变量和模糊推理为基础的一种计算机数字控制技术[9]。模糊控制的控制精度不高,适合系统数学模型不精确的非线性系统的控制[1]。自从Zedeh教授创立模糊数学以来[10],模糊控制器逐渐走入实际生产中,并且解决了很多实际问题。随着社会的发展,T-S模糊控制出现,相较于传统的模糊控制器,其在处理非线性系统稳定性分析及控制器综合方面发挥着巨大的作用。一型T-S模糊控制在一型模糊控制的基础上展开,可以表示光滑非线性系统,许多学者对此进行拓展和优化,使其具有更强的非线性能力。但随着系统的复杂性和不确定性的增加,用一个确定的隶属函数值描述某个对象属于某个模糊集的程度愈加困难,面对此种情况,Zedeh教授提出二型模糊集的概念[11],以提高系统应对复杂性及不确定性的能力。二型模糊集的隶属度表现为一型模糊集而不是确定的函数值,因此,在高度不确定场合下,二型模糊集具有更佳的控制性能[10]。为了简化计算,在二型模糊控制器的基础上,学者们提出区间二型T-S模糊控制器[11]。
滑模变结构控制是一类特殊的非线性控制。滑模控制方法的系统“结构”并不是固定的,它会依据当前的状态不停地切换控制量,使系统沿着提前设计好的“滑动模态”的状态轨迹运动,也就是说滑模控制本质的特点表现为控制的不连续性[4]。滑动模态与控制对象的参数以及各项扰动无关,且可以根据实际需要进行设计,故滑模控制具有鲁棒性强、反应快速、算法简单、方便物理上实现等多个优点。然而,由于系统中存在切换函数,状态轨迹到达滑模面后,会在滑模面上下来回穿越,从而产生抖振[12]。滑模控制可以很好地提高两轮移动巡检机器人的鲁棒抗扰性能,克服其数学模型不确定的缺点[13],但同时也会因为抖振大大增加执行机构的机械磨损。为了改善终端滑模控制带来的抖振现象,有学者提出了设计基于趋近律滑模控制方法[14]。
两轮移动巡检机器人具有转向灵活的特点,在一些狭窄的空间场合里也能够高效地完成任务,所以对两轮移动机器人的研究非常具有现实意义。但是两轮移动巡检机器人的系统特性使得单一控制方法无法完全兼顾各方面的性能。针对该问题,本文提出将模糊控制与滑模变结构控制合理地结合在一起,优势互补,从而消除滑模控制的带来抖振现象,以便更好地控制两轮移动巡检机器人。本文将先采用终端滑模控制控制机器人,再设计区间二型模糊滑模控制器,最后通过MATLAB来验证所提出方法的有效性。
1 两轮移动巡检机器人数学模型
建立数学模型的主要参数及具体含义见表1。HL、HR、HTL、HTR、VL、VR、VTL、VTR为机器人不同结构之间的相互作用力,具体含义可参考文献[1]。
机器人的非线性动力学模型建立如下[15]:
(1)
系统中各符号表达式如下:
f=[f1f2f3]T
(2)
(3)
u=[CθCδ]T
(4)
d=[d1d2d3]T
(5)
具体表达式如下:
(6)
(7)
f3=0
(8)
(9)
g12=0
(10)
(11)
g22=0
(12)
g31=0
(13)
(14)
(15)
(16)
d3=0
(17)
将表1中的参数代入式(1)的非线性动力学模型中,可以得到完善的机器人模型。
2 两轮移动巡检机器人的终端滑模律
根据终端滑模控制的基本原理,针对两轮移动巡检机器人中位移倾角子系统和偏航角子系统的非线性数学模型,详细介绍终端滑模器的设计过程。
两轮移动巡检机器人的系统动力学模型可表示为[1,15]:
(18)
本节所进行的设计不考虑外部扰动d(t)。系统可改写为:
(19)
定义机器人的轨迹跟踪误差,xrr、θr、δr分别代表xr、θ、δ的期望值:
(20)
对式(20)微分,得到:
(21)
对于位移倾角子系统,根据终端滑模的特性,设计滑模面为:
(22)
式中:c1>0,c2>0,c3>0,p、q、m、n是奇数,且p>q>0,m>n>0。
(23)
选择指数趋近律:
(24)
式中:ε1>0,k1>0。
根据式(23)和式(24),得到位移倾角子系统控制律为:
(25)
式中:ε1>0,k1>0。
对于偏航子系统,设计滑模面:
(26)
式中:c4>0,u、v是奇数,且u>v>0。
对式(26)作微分,可以得到:
(27)
选取指数趋近律:
(28)
式中:ε2>0,k2>0。
根据式(27)和式(28),得到偏航子系统控制律为:
(29)
式中:ε2>0,k2>0。
根据滑模可达性条件,选取李雅普诺夫函数:
(30)
对式(30)进行微分:
s2(-ε2sgn(s2)-k2s2)=
(31)

由上可知符合设计要求,两轮移动机器人系统能够在设计的滑模控制律的控制作用下,实现对参考位移和参考角度的轨迹跟踪。
3 区间二型模糊滑模控制
为了进一步提升控制性能,在终端滑模控制的基础上,利用区间二型模糊控制器消除滑模控制带来的抖振现象,即式(24)和式(28)中的k1和k2由区间二型模糊控制器产生,通过对这两个参数在线动态调整,使趋近律更加合理,并消除由滑模控制产生的抖振现象。模糊控制器有两种类型:一种是T-S模糊类型;另一种是Mamdani类型,本文采用后者,具体步骤如下:
1)确定区间二型模糊控制器的结构,选择输入、输出变量。


2)选择覆盖模糊论域的区间二型模糊子集,确立隶属函数。
(1)位移倾角子系统:



s1
(2)偏航角子系统:




s2
3)区间二型模糊规则的建立。设计的区间二型模糊控制规则如表2所示。其中,模糊隶属函数根据所处位置分别命名为NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)。

表2 区间二型模糊规则表
4)将所设计的区间二型模糊滑模控制器应用于两轮移动巡检机器人,并与一型模糊滑模控制器和纯终端滑模控制器进行比较,验证其有效性及优越性。
4 仿真分析
在MATLAB平台上对所设计的区间二型模糊滑模控制器进行仿真,用模糊控制器调整滑模控制律中切换控制项的增益,即模糊控制在滑模控制的基础上进行控制,参考信号为滑模控制参考轨迹。
本节分为两部分对系统仿真结果进行阐述:一是位移倾角子系统;二是偏航角子系统。通过对这两个子系统的仿真,可以得出结论:区间二型模糊滑模控制不仅能使系统输出达到指定位置,还能消除滑模控制带来的抖振,证明了本文方法在控制两轮移动巡检机器人上的有效性。
4.1 位移倾角子系统
仿真结果如图3-图8所示。其中:图3是控制量位移x的变化曲线;图4为倾角θ的变化曲线;图5是控制律即输入偏倾角转矩Cθ的变化曲线;图6是滑模面s1的变化曲线;图7和图8分别是位移和倾角跟踪误差曲线。
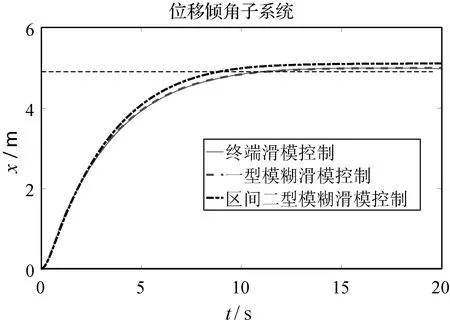
图3 直线轨迹位移曲线

图4 直线轨迹倾角曲线

图5 输入控制律(倾角转矩)变化曲线

图6 滑模面变化曲线

图7 直线轨迹偏位移跟踪误差曲线
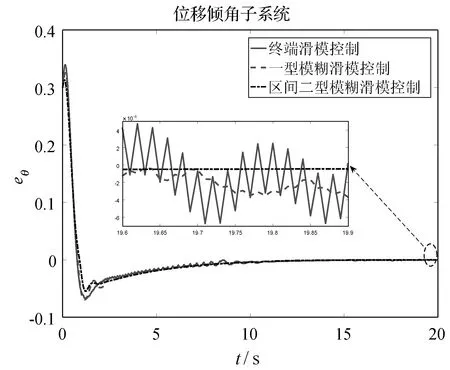
图8 直线轨迹倾角跟踪误差曲线
根据图3和图4,在三种不同控制器控制下,位移和倾角均跟踪上了参考轨迹。对位移曲线来说,加入一型模糊控制器后,曲线没有明显变化,加入区间二型模糊控制器后,调节时间加快。对倾角曲线来说,加入模糊控制后,系统超调明显降低,抖振减小,其中区间二型模糊滑模的控制效果比一型模糊更好,在局部放大图中,区间二型模糊控制下的曲线几乎是一条直线。
根据图5,不同控制方法下输入倾角转矩的变化范围不同,变化范围由大到小依次为终端滑模控制、一型模糊滑模控制、区间二型模糊滑模控制。所设计的模糊控制能够动态地调整控制律中切换项的增益。
根据图6,不同控制方法下滑模面的变化不同,纯滑模控制下,滑模面在0附近密集变化,且范围很大;一型模糊滑模控制下,滑模面变化范围减小,且仍在0附近密集变化;区间二型模糊滑模控制下,变化范围几乎为一条直线,但值得注意的是,该滑模面不在0附近上下变动,而是略高于0点线。
根据图7和图8,位移误差和倾角误差均在较短时间内到达0附近。对位移误差来说,纯终端滑模控制和一型模糊滑模控制的稳态误差几乎一致,曲线重合,而区间二型模糊滑模控制的稳态误差较前两者来说稍大一些,但也在容许范围之内。对倾角误差来说,从整体图来看,三种控制方法的稳态部分曲线重合,稳态误差一致,从放大图来看,在三种控制方法下,区间二型模糊滑模控制由于消除了由滑模控制产生的抖振,稳态误差控制得最好。
4.2 偏航角子系统
仿真结果如图9-图11所示。其中:图9是偏航角δ的变化曲线;图10是控制律即输入偏航角转矩的变化曲线;图11是滑模面的变化曲线;图12是偏航角误差跟踪曲线。

图11 滑模面变化曲线

图12 直线轨迹偏航角误差跟踪曲线
根据图9,在三种控制器的控制下,偏航角均跟踪上了指定轨迹,且加入模糊控制器后,调节速度与调节时间基本没有变化。比较抖振情况,根据局部放大图,纯滑模控制下,抖振范围较大,约为3×10-3;一型模糊滑模控制下,变化范围相较于滑模控制,有了很大的改善,约为2×10-4;区间二型模糊滑模控制下,即使在局部放大后,依然看不出任何波动,且相比一型模糊滑模控制,效果更好。
根据图10,不同控制方法下输入偏航角转矩的变化范围不同,纯滑模控制下,变化范围为-5~5;一型模糊滑模控制下,变化范围为-0.316 2~0.316 2;区间二型模糊滑模控制下,变化范围-0.006 7~0.006 7,肉眼范围内,几乎为一条直线,因此,模糊控制对切换项的增益起到了良好的控制效果。
根据图11,不同控制方法下滑模面的变化不同,纯滑模控制下,滑模在0附近变化较大,变化范围在-0.2~0.4之间;一型模糊滑模控制下,滑模面在0~0.05内变化;区间二型模糊滑模控制下,变化范围几乎为一条直线。
根据图12,三种控制方法均使偏航角的误差在较短时间内到达0附近,模糊控制对该系统的稳态误差有很大的改善。其中:纯滑模控制下,稳态误差约为5×10-3;一型模糊滑模控制下,稳态误差约为8×10-4;区间二型模糊滑模控制下,稳态误差为0。
5 结 语
本文针对两轮移动巡检机器人提出了区间二型模糊滑模控制器。通过区间二型模糊控制器对终端滑模控制律的切换项增益进行动态调整,以到达削弱甚至消除滑模控制带来的抖振现象的目的。通过在仿真平台上对终端滑模控制、一型模糊滑模控制以及区间二型模糊滑模控制仿真分析,所设计的区间二型模糊控制器在快速使机器人保持平衡的同时,能够追踪参考轨迹。此外,一型模糊滑模控制器能够很好地削弱由滑模控制带来的抖振,而区间二型模糊控制器能够有效地消除由滑模控制带来的抖振。本文所设计的区间二型模糊滑模控制器达到了预期的控制目的。
