考虑基础激励输入的柔性磁悬浮控制系统
2020-10-11沈钢,李钦,陈浩
沈 钢,李 钦,陈 浩
(1. 同济大学铁道与城市轨道交通研究院,上海201804;2. 上海市计量测试技术研究院,上海201203)
磁悬浮车辆有着速度快、能耗低、转弯半径小、爬坡能力强等优点,是未来交通领域重要的发展方向[1]。德国对磁悬浮车辆的研究较早,研制的TR系列磁悬浮列车已有50 年的历史[2]。我国上海的世界首条商用高速磁悬浮线路即由德国TR08 系列磁悬浮列车发展而来。日本的HSST型中低速磁悬浮和MLX 型高温超导磁悬浮列车亦达到了较高的技术水平。然而,目前磁悬浮列车的车轨耦合振动问题急需解决[3]。日本的HSST 型列车和德国的TR04列车均曾发生过车轨耦合振动过大的情况[4]。当磁悬浮系统遇到轨道局部的不平顺激励时,磁铁间由车辆链接形成的耦合导致车轨间的耦合振动,极大地影响车辆运行的舒适性甚至安全性。目前工业上广泛使用的磁悬浮控制算法均基于将轨道板假设为绝对刚性而设计的,由于不考虑轨道板的振动自由度,从理论上车轨耦合振动无法完全抑制。只有增大轨道板刚度,提高轨道板和桥梁基础的制造、安装等精度,才能够保证磁悬浮车辆系统具有可以接受的稳定性,这也就造成了磁悬浮线路的建设成本极高,难以大规模推广应用。通过改进控制算法提升磁悬浮系统的稳定性,提高容许的轨道板精度误差、桥梁基础精度误差以及降低轨道板刚度要求,这无疑有着很大的经济价值和应用价值。
本研究中探讨了考虑轨道板振动的柔性控制算法下磁悬浮车辆系统对轨道板的刚度要求,并讨论了磁悬浮系统在不同激励作用下的响应。
1 系统的数学描述
车轨耦合的磁悬浮车辆系统主要包括电磁铁、轨道板、桥梁基础等三个部分。为了数学描述的方便,将车体与悬浮架的质量等效在电磁铁上,将轨道板等效为桥梁基础上的质量刚度系统。图1为磁悬浮系统结构。图1 中,x1、x2分别为轨道板和电磁铁的位移,w为基础的位移激励输入,m1、m2分别为轨道板和电磁铁的质量,k为轨道板的等效刚度,F为电磁铁的电磁力,R为电磁线圈的电阻,U为电磁线圈间的电压,L为线圈的电感。
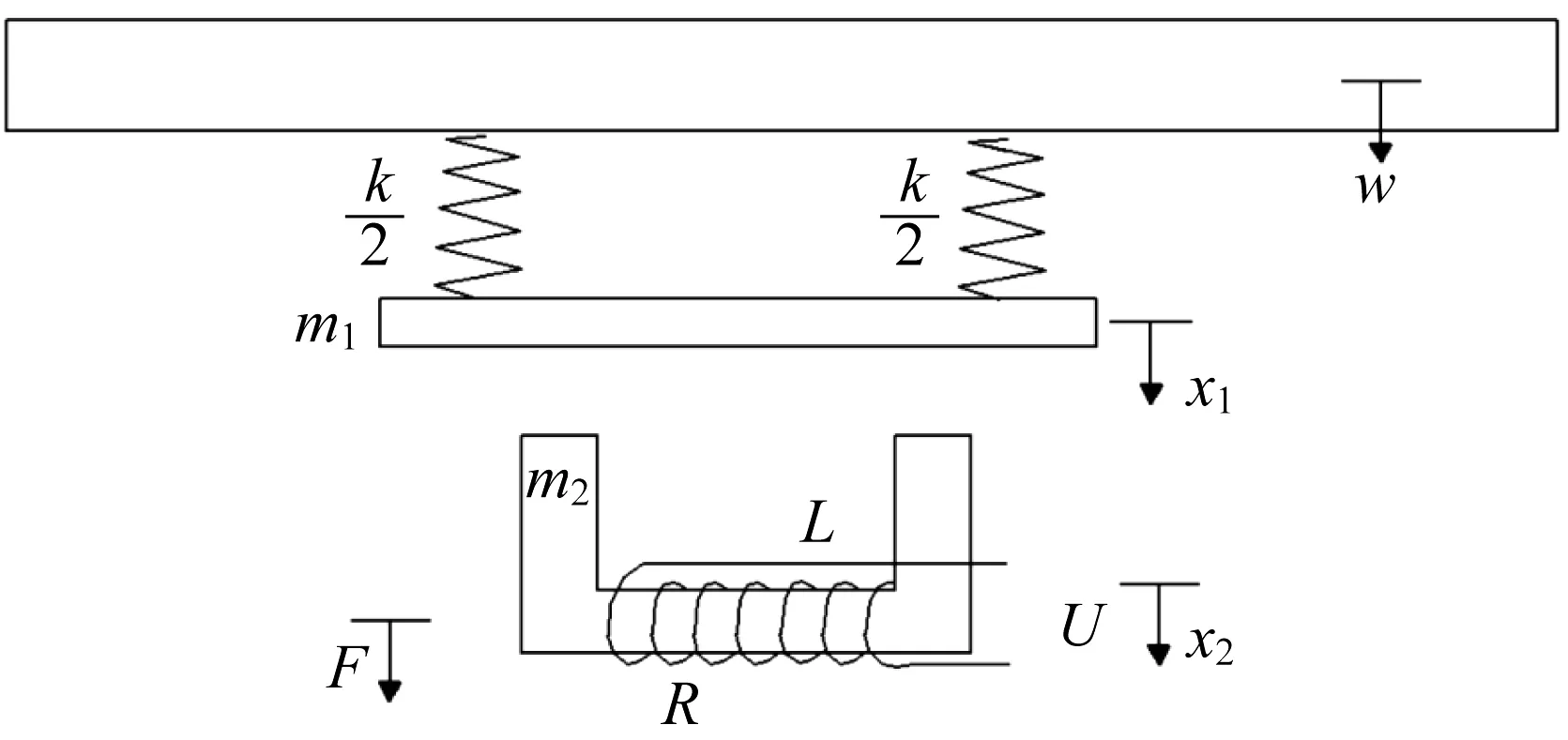
图1 考虑基础激励输入的磁悬浮系统结构Fig.1 Structure of maglev system considering irregularity excitation
由电工学中电磁铁的工作原理可知,电磁力的计算式如下所示[5]:

式中:μ0为真空磁导率;N为线圈匝数;Asm为磁极面积;I为线圈电流。为了方便进行控制器的设计和研究,在工作点处将非线性的电磁系统方程线性化。令S=x2-x1为悬浮气隙,分别将电磁力F关于电流I和气隙S求偏导数,可得到电磁力的线性化方程,如下所示:
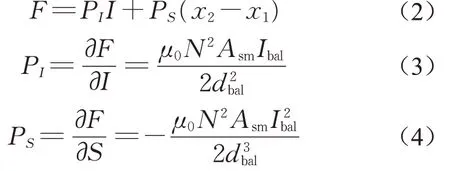
式(2)~(4)中:PI和PS分别为电流系数和气隙系数;Ibal和dbal分别为系统的平衡电流和平衡气隙。
由牛顿运动定律可得电磁铁和轨道板的运动方程,如下所示:

由Meisinger等[6]的工作可以得到电磁铁的电气方程,如下所示:

式中:η为漏磁率。式(2)~(7)对磁悬浮系统进行了完整的数学描述。
2 控制器的设计
状态反馈是一种广泛应用于控制领域的控制形式。将系统的状态变量反馈给控制器进行计算,得到的控制量作用回系统中以实现控制[7]。下面建立针对磁悬浮系统的状态反馈控制器。对于磁悬浮系统而言,目前工业上广泛应用的控制器大多不考虑轨道板的振动情况,即将轨道板假设为绝对的刚性物体,基于此假设计算的控制器简称刚性控制器。考虑轨道板振动自由度,轨道板被作为质量刚度系统对待,基于此假设计算的控制器简称柔性控制器。从理论上看,刚性控制器在设计时不考虑轨道板的自由度,计算更为简单、快速;柔性控制器考虑的自由度较多,控制器本身在实现控制时的计算量也会较大。
2.1 刚性控制器设计
由于不考虑轨道板振动的自由度,因此数学模型中的x1被认为是定值,不参与控制器的计算。针对式(2)~(7)描述的磁悬浮系统,选取x2、ẋ2、ẍ2作为系统的状态变量,Xs=[x2ẋ2ẍ2]T在平衡位置将系统线性化,则系统的数学描述可整理为如下形式的方程组:
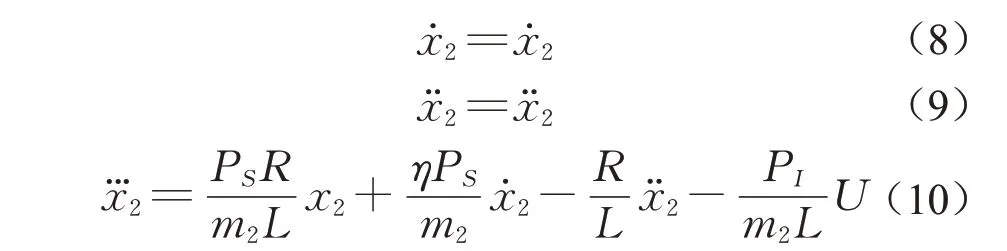
式(8)~(10)为整理后刚性控制器控制下的系统描述,得到的系统状态方程如下所示:

式中:Ks为设计的刚性控制器。刚性控制器结构如图2所示。
建立性能泛函,如下所示:

式中:qd、q2、r分别为悬浮气隙加权系数、磁铁振动加速度加权系数和控制电压加权系数。由于刚性控制算法不涉及轨道板的自由度,因此性能泛函只能对电磁铁自由度的相关信息进行约束。性能泛函的选取决定了控制器的控制效果。在Simulink平台上不断调试性能泛函中qd、q2、r的取值组合,以电磁铁和轨道板振动较小和控制电压在可接受范围内为目的,得到较优的权重系数组合。经过仿真试验尝试,取qd=106、q2=1、r=1,分别对悬浮气隙、磁铁振动加速度和控制电压进行加权。
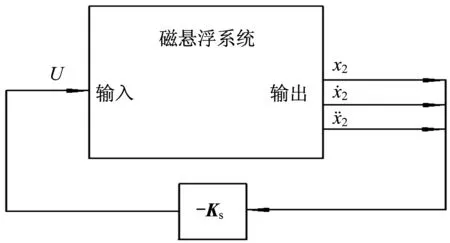
图2 刚性控制器结构Fig.2 Structure of stiff controller
式中:Qs和Rs分别为输出加权矩阵和控制加权矩阵。对希望的输出指标和控制电压进行加权,达到使磁悬浮系统的气隙振动和电磁铁的振动较小,同时控制电压不能太大的目的。
由最优控制理论可知,满足下式的U使得性能泛函J最小[8]:

式中:P为Riccati方程的解。Riccati方程如下所示:

2.2 柔性控制器设计

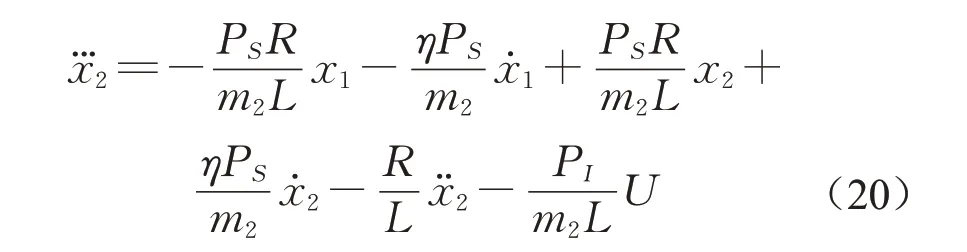
式(16)~(20)即为整理后柔性控制器下的系统描述方程组。系统的状态方程如下所示:
状态反馈控制律如下所示:

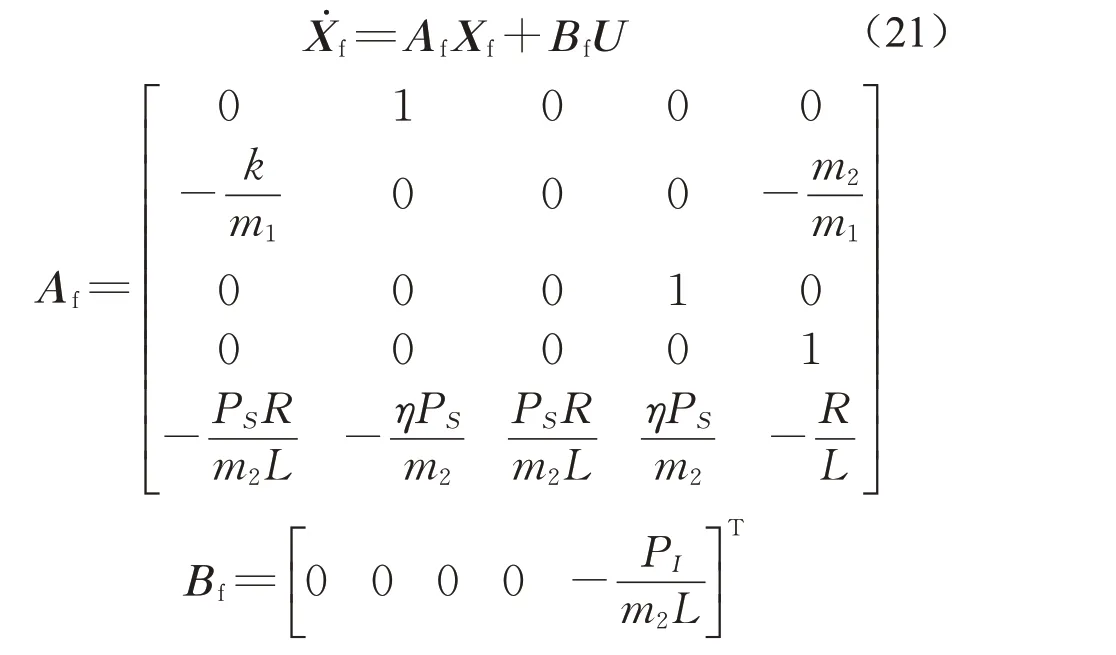
式中:Kf为设计的柔性控制器。柔性控制器结构如图3 所示。由于考虑了轨道板的振动,因此性能泛函便可对轨道板的运动做出控制要求。式(23)中qt便体现了对轨道板振动的约束,使得控制器工作时得以抑制轨道板的振动。性能泛函如下所示:

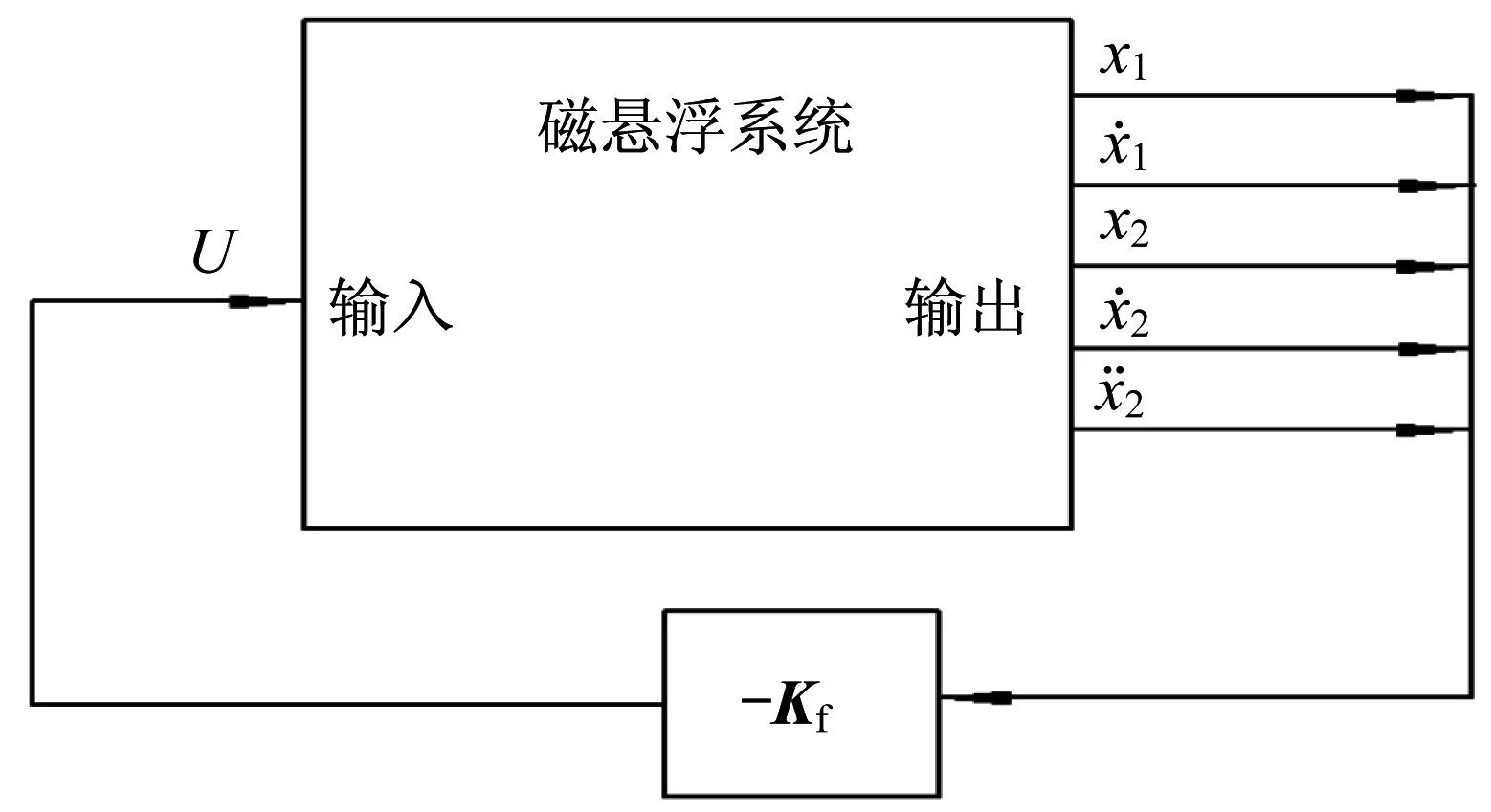
图3 柔性控制器结构Fig.3 Structure of flexible controller
取qt=107、qd=106、q2=1、r=1,分别对轨道板的振动速度、悬浮气隙、电磁铁的加速度、控制电压进行加权。
令
式中:Qf和Rf分别为输出加权矩阵和控制加权矩阵。希望通过加权,使得轨道板的振动和电磁铁的振动较小,悬浮气隙的波动也较小,同时控制电压在合理的范围内。
由最优控制理论可知,满足下式的U使得性能泛函J最小:

式中:P为Riccati方程的解。Riccati方程如下所示:

3 轨道板刚度对悬浮稳定性的影响
为了分析控制器的作用效果,建立了Matlab/Simulink 磁悬浮系统模型,并将不同的控制算法搭建在模型上。Simulink模型结构如图4所示。
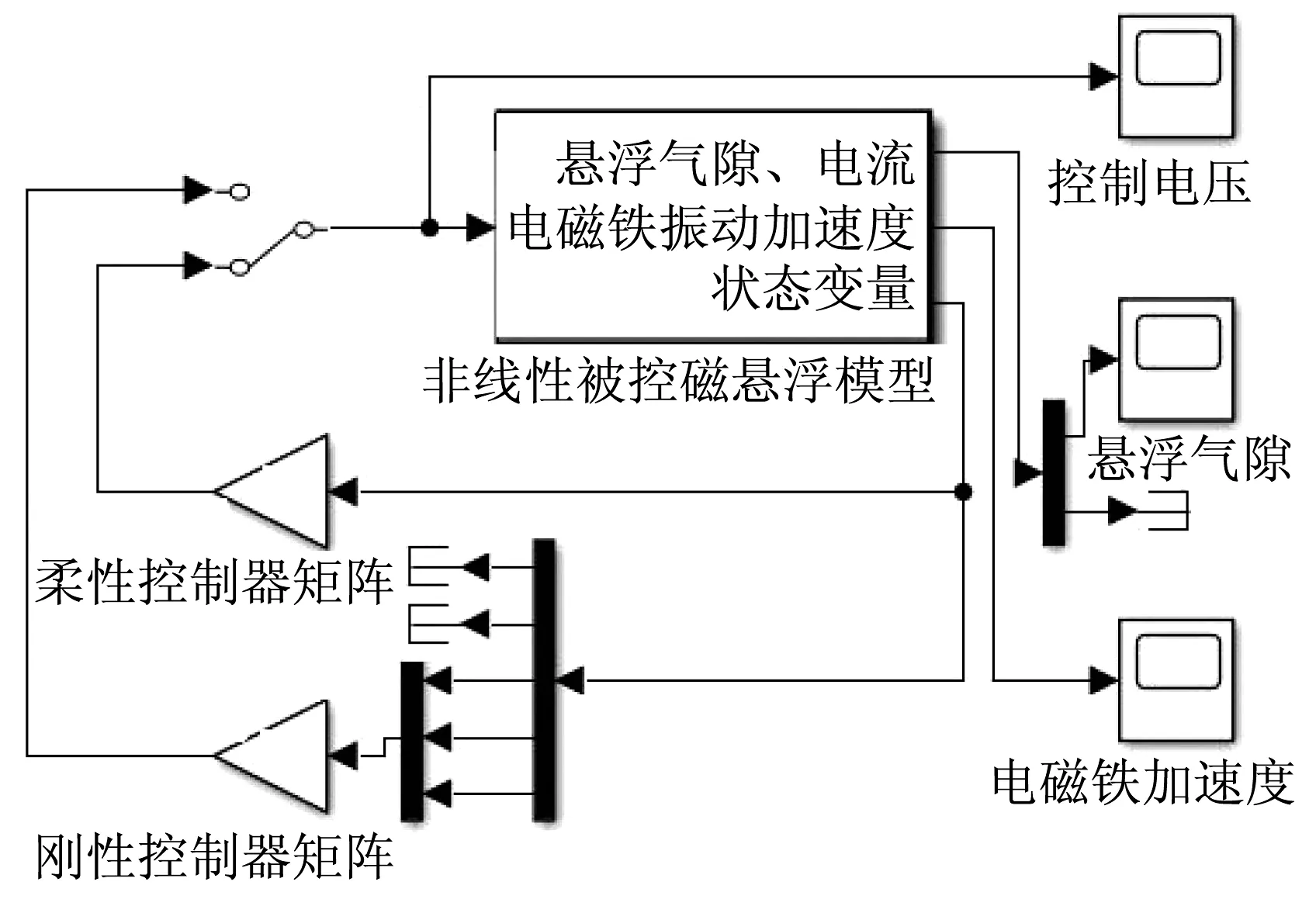
图4 Matlab/Simulink控制模型结构Fig.4 Structure of Matlab/Simulink control model
在Simulink 模型中,刚性控制器和柔性控制器的控制矩阵皆建立在系统中,由开关通道选择实行控制的控制算法。模型参数如表1所示。
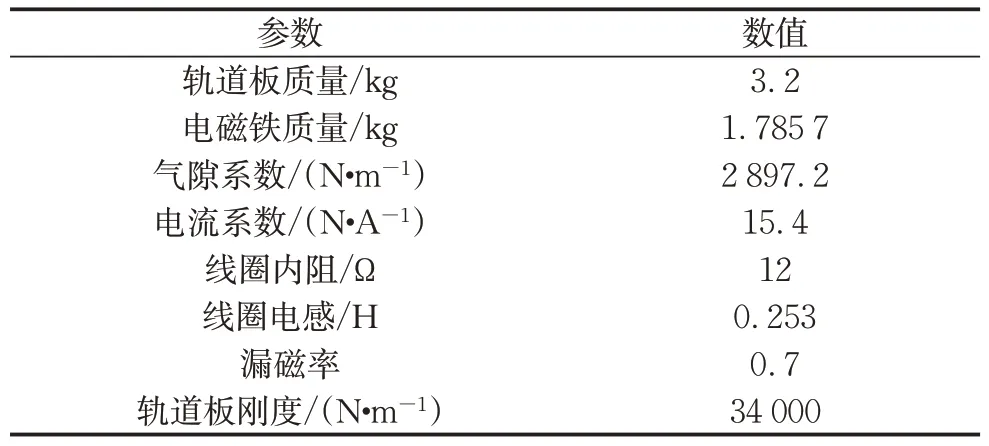
表1 模型参数Tab.1 Parameters of model
分别使用第2 节推导的刚性控制算法U=-KsXs和柔性控制算法U=-KfXf进行仿真试验。轨道板刚度取34 000 N·m-1,悬浮气隙响应如图5所示。
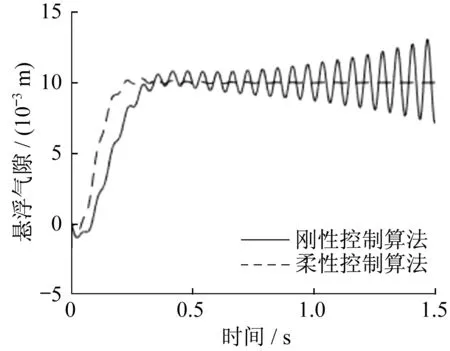
图5 悬浮气隙响应Fig.5 Air gap response
由图5可见,刚性控制算法下系统是发散的,而柔性控制算法下系统可以很好地收敛。刚性控制算法下对磁悬浮系统增加不同的轨道梁刚度K,得到的悬浮气隙响应如图6~9所示。

图6 K=510 000 N·m-1Fig.6 K=510 000 N·m-1
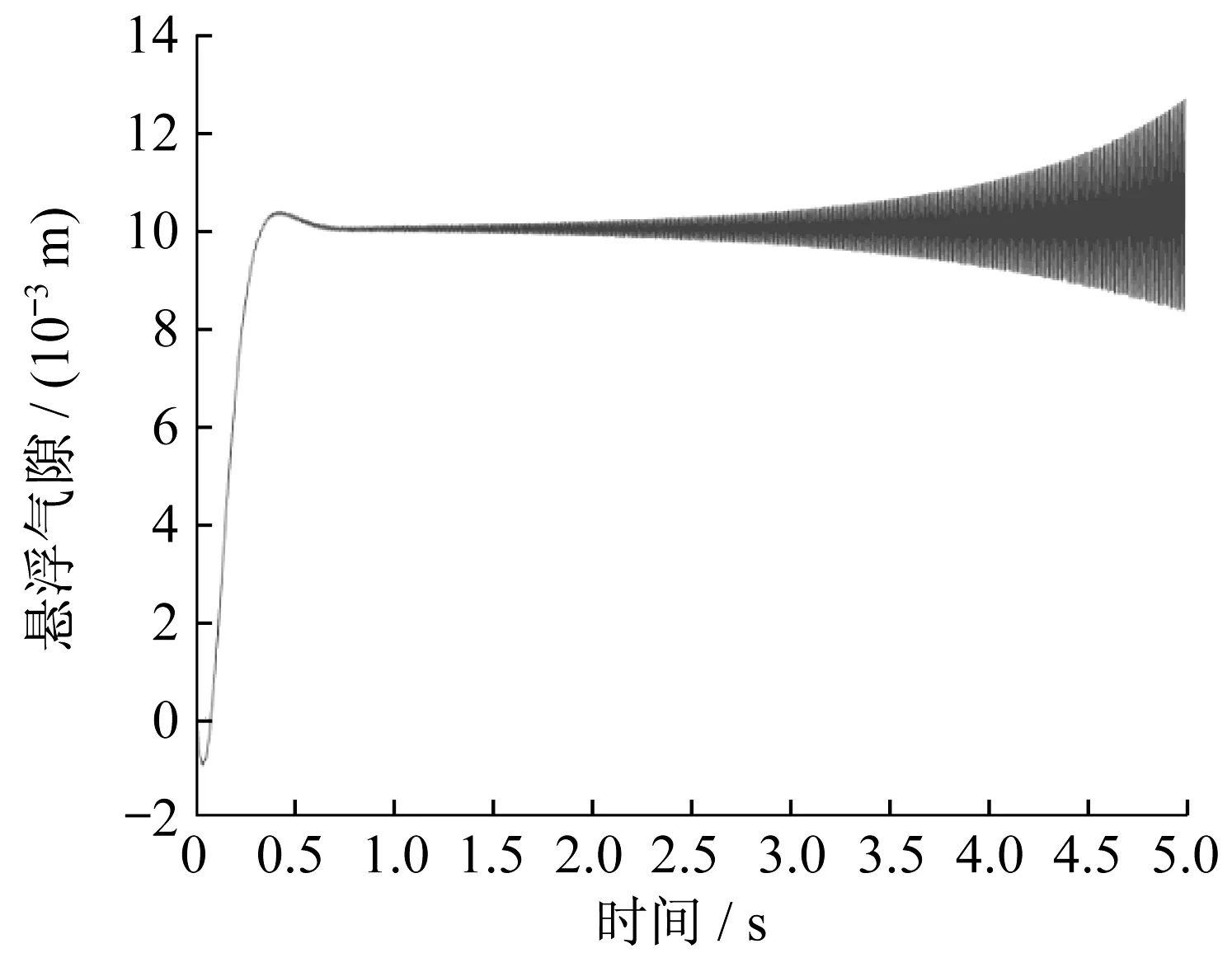
图7 K=680 000 N·m-1Fig.7 K=680 000 N·m-1
柔性控制算法下对磁悬浮系统增加轨道梁刚度K,得到的悬浮气隙响应如图10和图11所示。
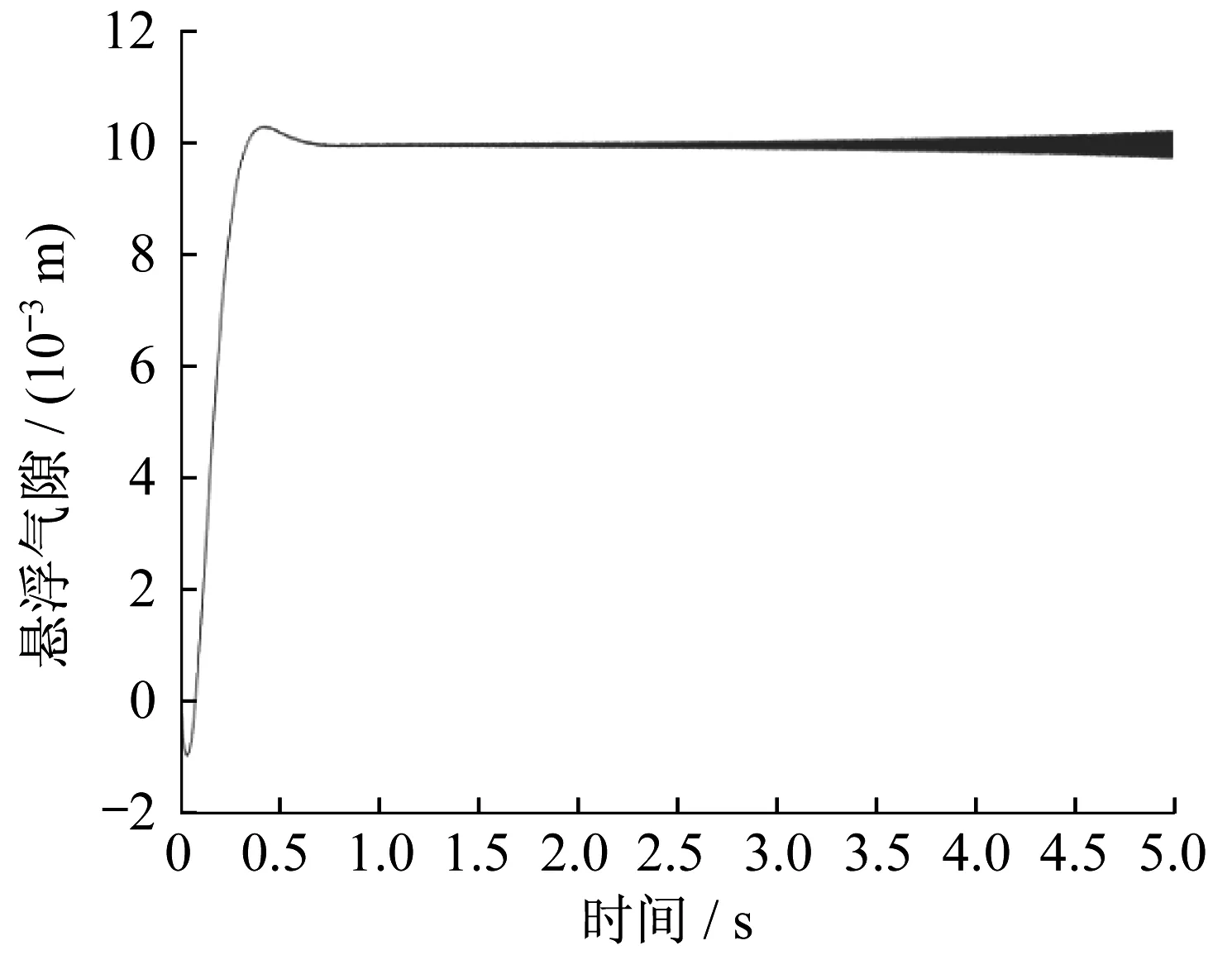
图8 K=1 020 000 N·m-1Fig.8 K=1 020 000 N·m-1
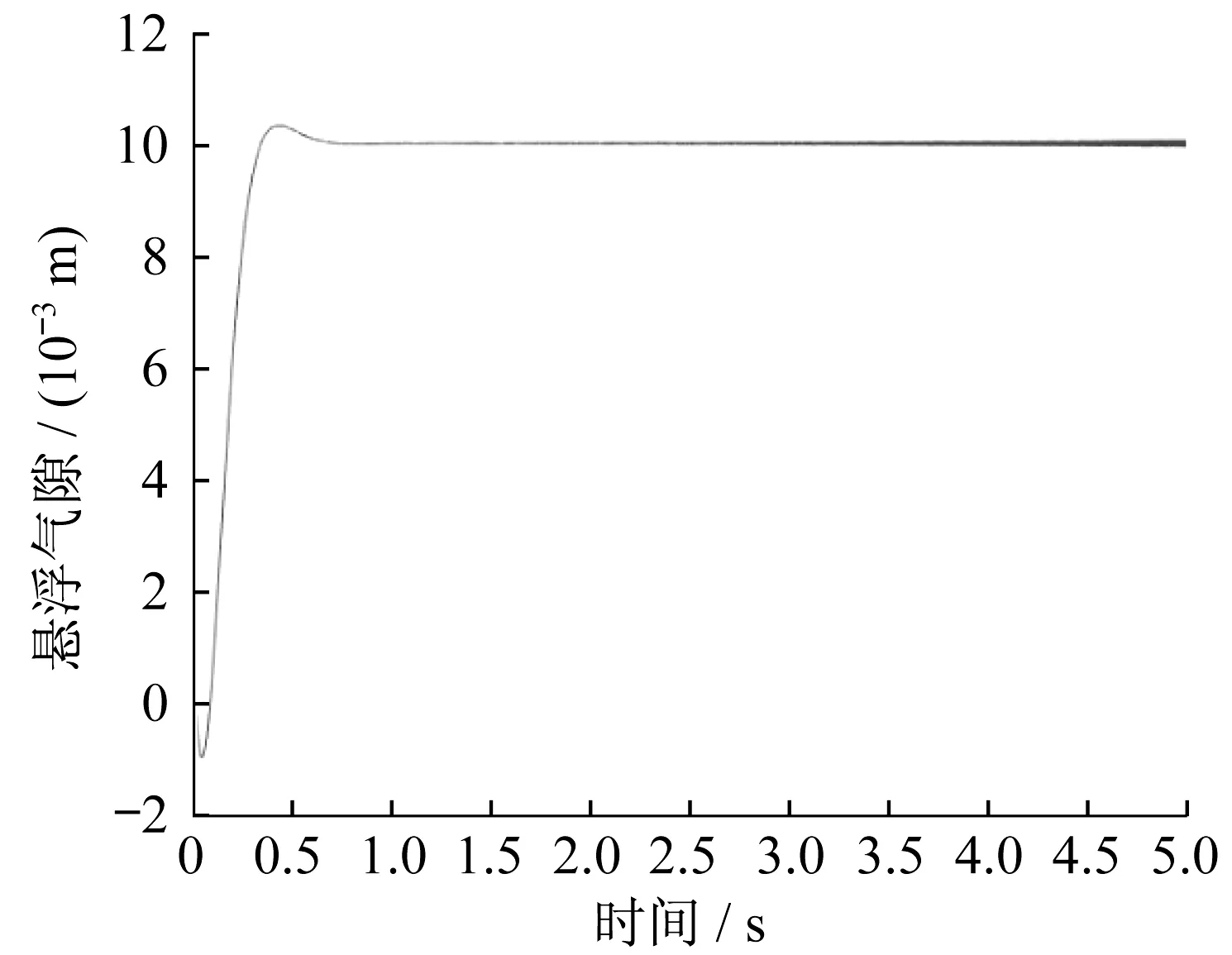
图9 K=1 700 000 N·m-1Fig.9 K=1 700 000 N·m-1
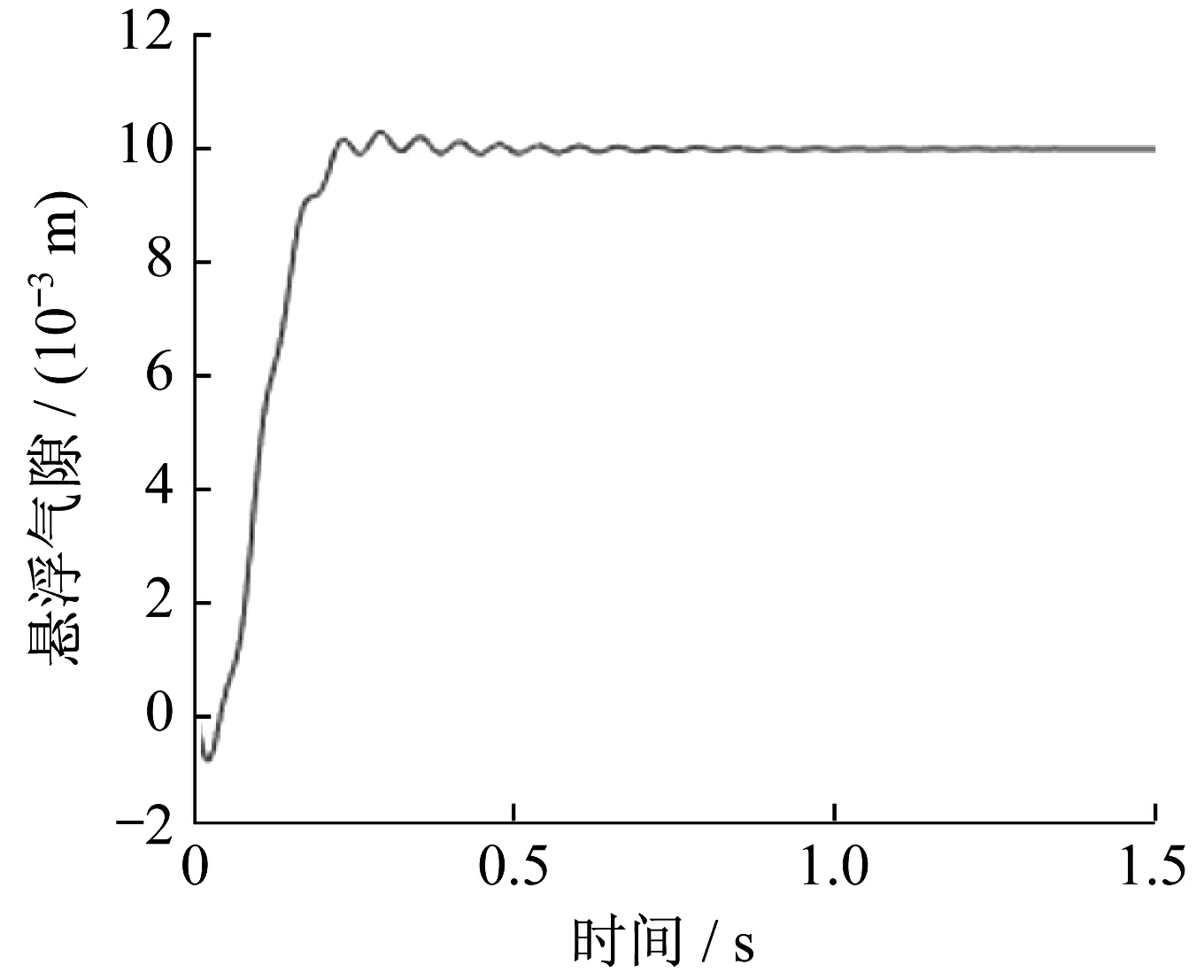
图10 K=34 000 N·m-1Fig.10 K=34 000 N·m-1
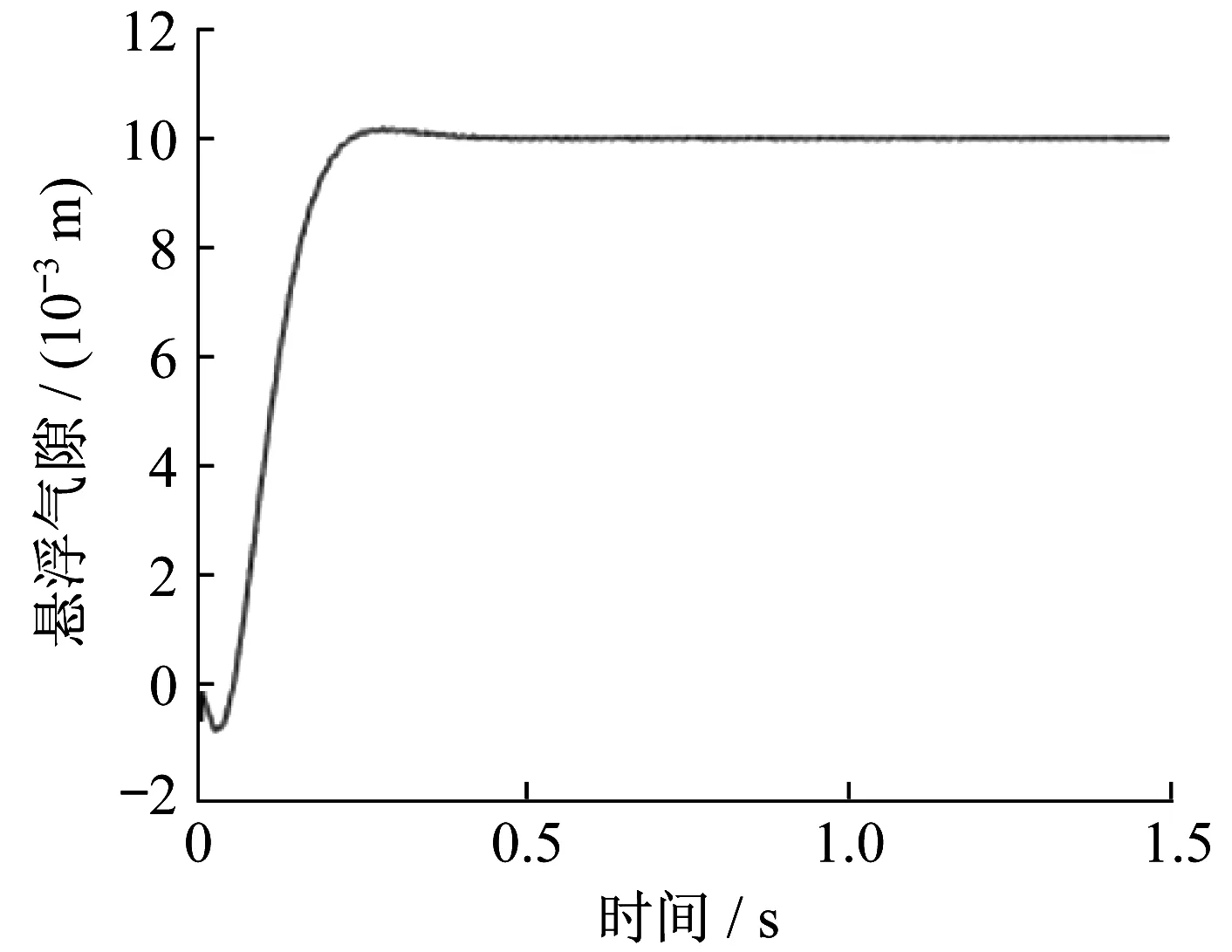
图11 K=510 000 N·m-1Fig.11 K=510 000 N·m-1
由图10和图11可见,柔性控制算法下磁悬浮系统在初始刚度K=34 000 N·m-1时已经稳定,增大刚度只会进一步增强系统的稳定性,悬浮气隙响应的波动进一步减小,系统更快收敛在平衡位置。由图6~9可见,刚性控制算法很难使磁铁轨道系统稳定。轨道板刚度增大到原刚度的50倍时,刚性控制算法才能够将系统稳定在一定的范围内,但是对悬浮气隙的响应曲线放大后仍可看出系统在平衡位置处存在着振荡,并且振荡一直持续存在。这是由于控制系统未考虑轨道板的自由度,对轨道板振动无法进行抑制,除非轨道板自身存在一定的阻尼,否则系统很难趋向稳定。现实中,轨道板总会存在一定的阻尼,不断地增大轨道板的刚度亦能够使得系统趋向于稳定,这也是实际工程中,采用刚性控制算法的磁悬浮线路轨道板质量很大、造价高昂的原因。
4 轨道存在激励
在工程实际中,由于磁悬浮车辆需要通过桥梁,因此桥梁间的制造精度误差以及地表的沉降等因素都会造成磁悬浮线路基础存在扰动。为了减少扰动对磁悬浮系统的不利影响,通常对桥梁和基础的制造要求很高,这也大大提高了磁悬浮线路的工程造价。通过提升控制算法来提高系统的稳定性,降低对桥梁基础等的建造精度要求,无疑有着很大的经济价值,十分有利于磁悬浮车辆的进一步推广应用。下面对存在激励情况时不同控制器作用下的系统响应进行分析。
4.1 固定基础激励
假定某一轨道板下的基础存在垂向的不平顺激励,为阶跃形式的激励输入。假设轨道板长度为3 m,磁悬浮列车通过的速度为200 km·h-1,则阶跃激励的时长为0.054 s。下面探讨激励的大小与磁悬浮系统稳定性的关系。激励输入如图12所示。
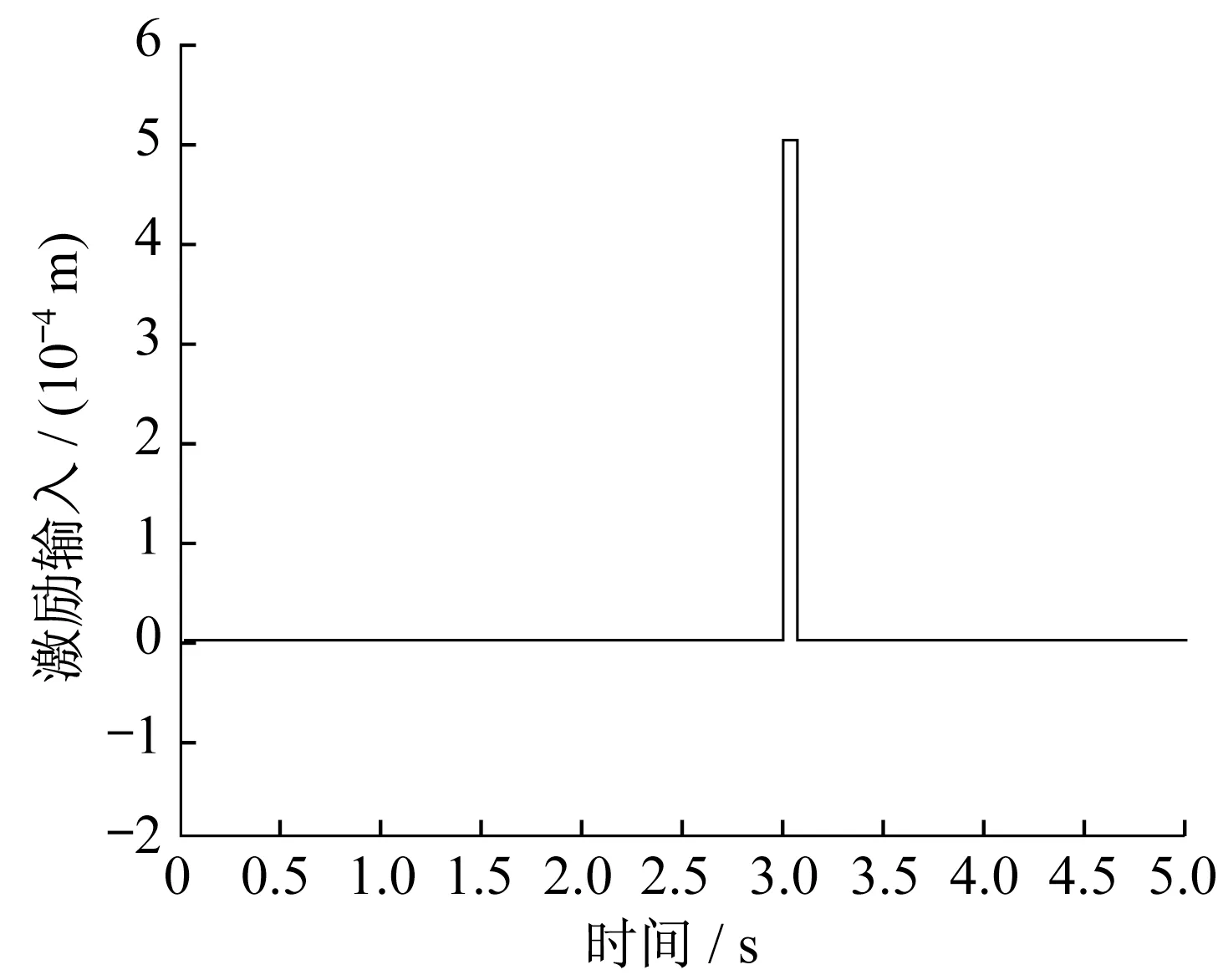
图12 激励输入Fig.12 Disturbance input
在刚性控制算法下将轨道板的刚度增大50倍,K=1 700 000 N·m-1,加入激励信号后,悬浮气隙响应如图13和图14所示。
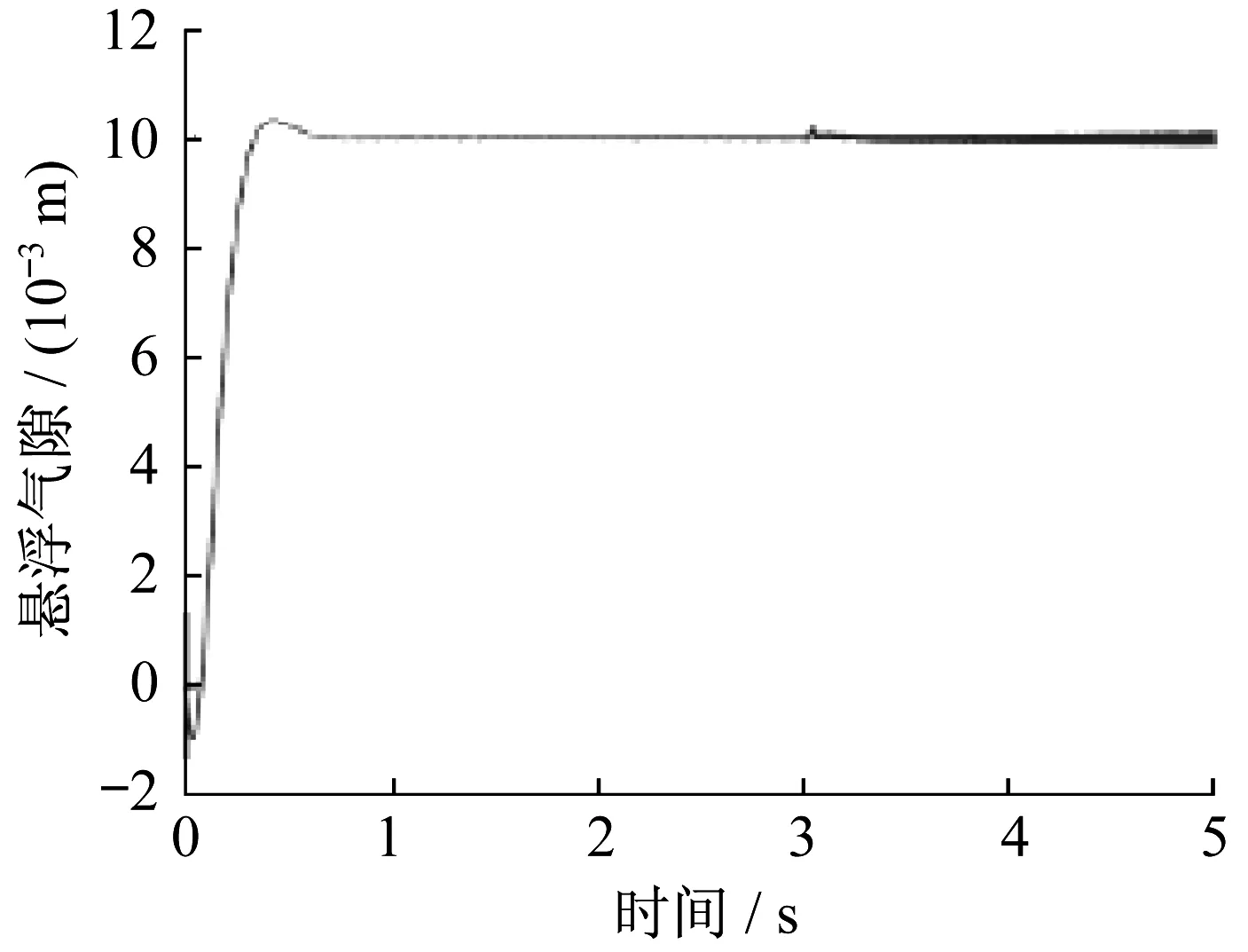
图13 w=0.1 mmFig.13 w=0.1 mm
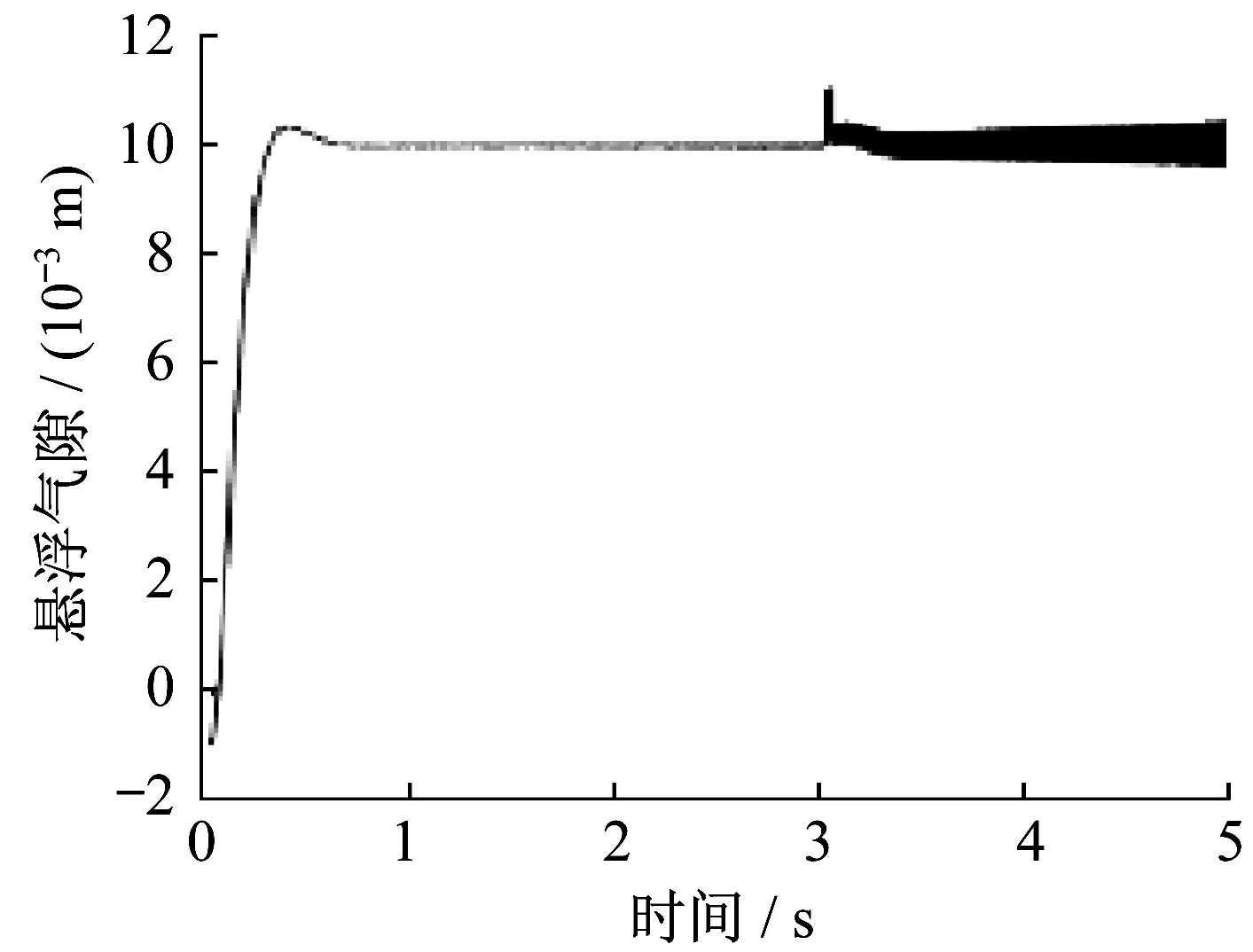
图14 w=0.5 mmFig.14 w=0.5 mm
由图13和图14可见,刚性控制算法下基础激励输入后,系统被激励并出现逐渐扩大的振荡。在激励输入w=0.1 mm的情况下振荡相对较小,但仍为缓慢发散的趋势。因此,刚性控制算法校正下的磁悬浮系统对于基础的激励鲁棒性很差,极易造成系统振荡失稳。。
柔性控制算法下的悬浮气隙响应如图15~18所示,轨道板刚度取较小的预先值K=34 000 N·m-1。
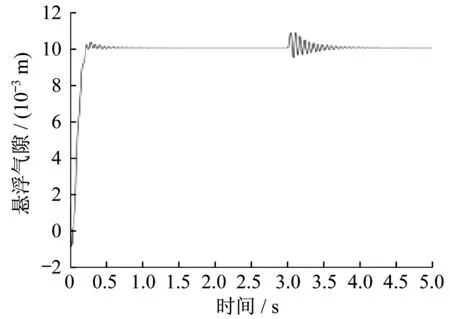
图15 w=0.5 mmFig.15 w=0.5 mm
由图15~18 可见,激励增加至1.5 mm 后,振荡才超过8 mm的安全界限。在激励小于1.5 mm的情况下,系统都可以很好地收敛并且振荡小于安全界图18w=1.5 mm Fig.18w=1.5 mm限。与刚性控制算法对比,柔性控制算法对固定基础激励的稳定性更好。

图16 w=1.0 mmFig.16 w=1.0 mm
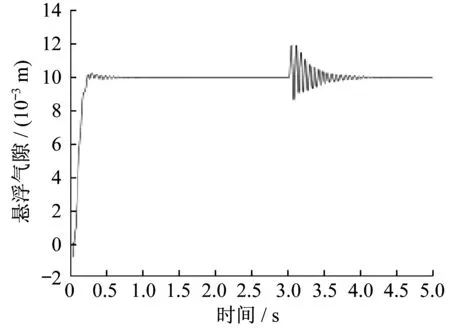
图17 w=1.2 mmFig.17 w=1.2 mm
4.2 随机基础激励
在同样的轨道刚度条件下,添加如图19所示的轨道基础扰动,每秒产生一个随机的阶跃信号。
从图20和图21可以看,刚性控制算法下悬浮气隙的波动已超出8 mm的安全范围,而柔性控制算法下悬浮气隙可以保持在安全的范围之内。
轨道板的高频不平顺和基础的高频不平顺也会对悬浮稳定性造成影响。图22 为由某实测高速磁悬浮线路不平顺数据生成的高频随机激励。刚性和柔性控制算法的悬浮气隙响应如图23 所示。由图23 可见,高频激励时刚性控制算法下悬浮气隙更容易振荡超限且振荡有发散的趋势;柔性控制算法下悬浮气隙相对稳定,振荡的幅度更小,收敛得更快。
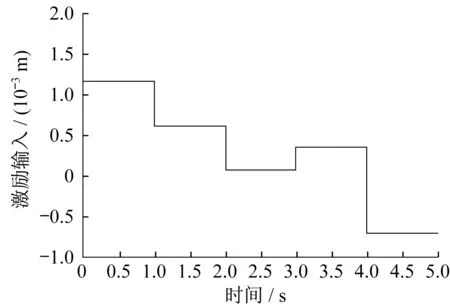
图19 轨道激励输入Fig.19 Track disturbance input
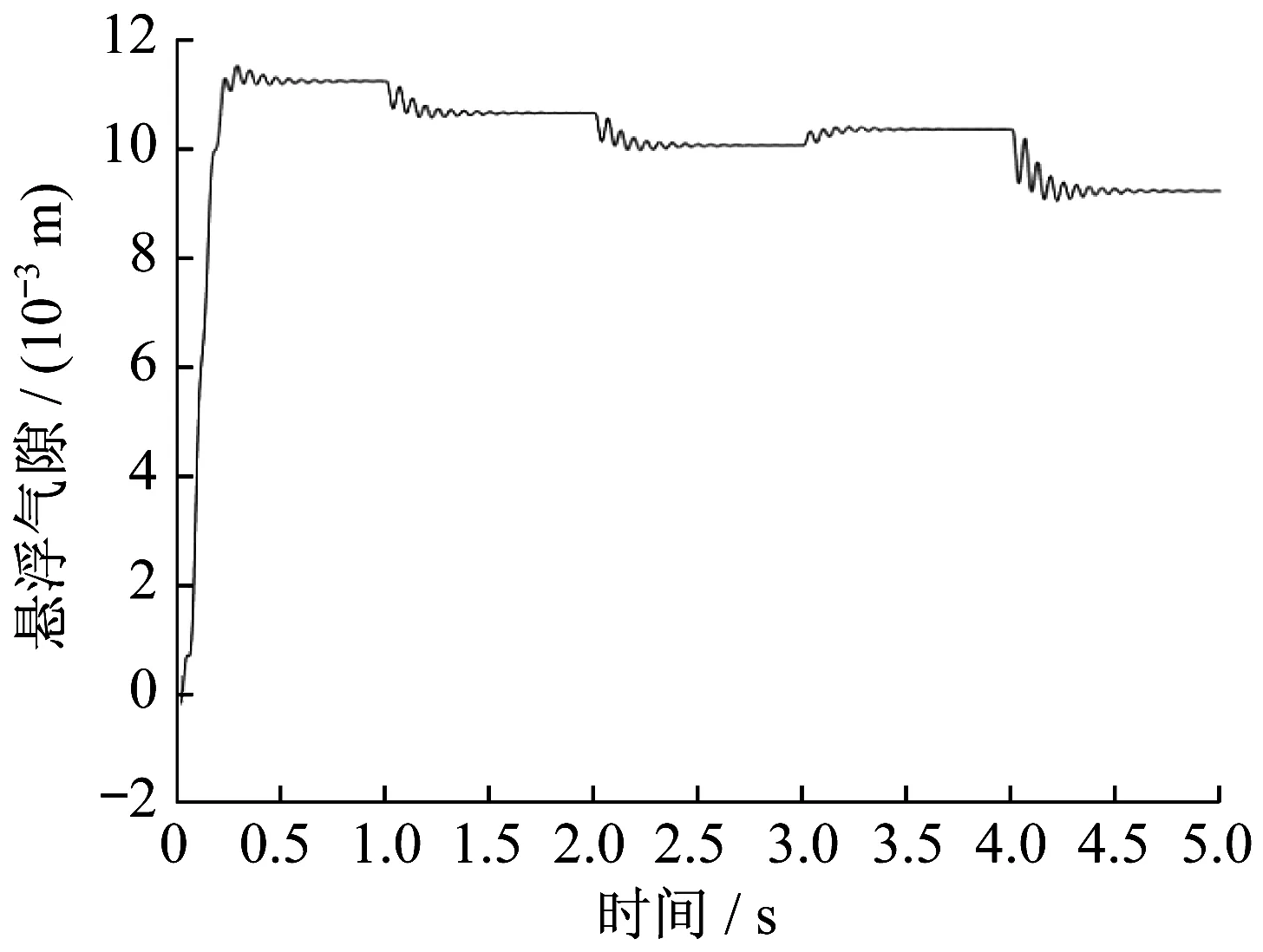
图20 柔性算法悬浮气隙响应Fig.20 Air gap response of flexible controller
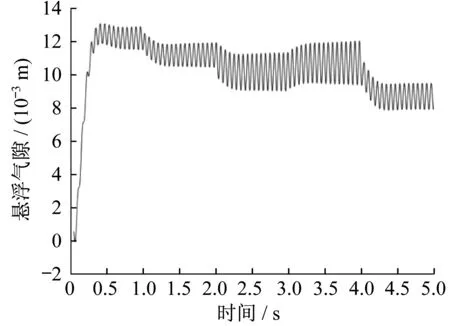
图21 刚性算法悬浮气隙响应Fig.21 Air gap response of stiff controller
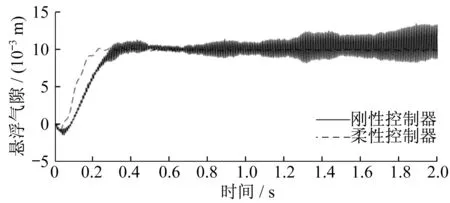
图23 两种算法的悬浮气隙响应Fig.23 Air gap responses of two controllers
5 结论
(1)增大轨道板的刚度有利于磁悬浮系统的稳定。刚性控制算法对刚度要求较高,而柔性控制算法对刚度要求较低。刚性控制算法下磁悬浮系统极易出现振荡和车轨耦合振动,并且较难抑制。
(2)对于存在轨道基础激励的情况,刚性控制算法鲁棒性较差,激励极易造成系统振荡甚至失稳。柔性控制算法对轨道基础不平顺激励输入的鲁棒性较好,在激励不大于1.5 mm时皆可保证振荡很快收敛且振幅不超过磁悬浮系统的安全界限。
