新型多功能护理床的结构设计
2020-10-10何磊韩庆珏陈燕郭子毅杨司琪
何磊 韩庆珏 陈 燕 郭子毅 杨司琪


摘要:我国是老龄化大国,当前对护理床的需求量不斷增加。基于对现使用护理床的调研分析,为扩大护理床使用群体和改善使用者的体验,提出新型多功能护理床的概念,在现有护理床的基础上,首先对结构进行创新设计,随后对关键构件进行有限元分析,推动了护理床产业发展,为各企业优化护理床提供了新思路。
关键词:多功能护理床;运动学分析;有限元分析
0 引言
近些年来,医院、养老院和家庭等对护理床需求增加,特别是我国推行居家护理政策后,居家护理对护理床的需求量进一步提升。
日本松下公司设计的护理床已经可以实现大部分功能,但操作比较复杂,且价格昂贵。美国METROCARE公司和DEVICELINK公司设计的护理床只能完成部分功能,且存在运动笨重、功能单一等缺点。
本文主要基于我国老龄化程度,分析了多功能护理床的市场可行性:我国自主研发进度相对较慢,依赖进口特别严重,因此自主研发一款定价低廉、功能齐全、适用范围广的护理床将具有很好的市场前景。技术方面,可与目前的智能化、物联网有效结合;安全方面,以老人的舒适性为前提,安全性为核心,在人机交互方面有良好的提升。无论是在养老院、医院还是家庭使用,该护理床都能让被护理人员感到安心,也减少了护理人员的工作量,使双方心情愉悦,更有利于被护理人恢复健康。
1 新型多功能护理床的总体设计方案
根据中华人民共和国国家标准《可调式康复训练床》(GB/T 26340—2010)中对具体尺寸的建议,该护理床的总体尺寸为:长×宽×高=2 100 mm×1 350 mm×500 mm。
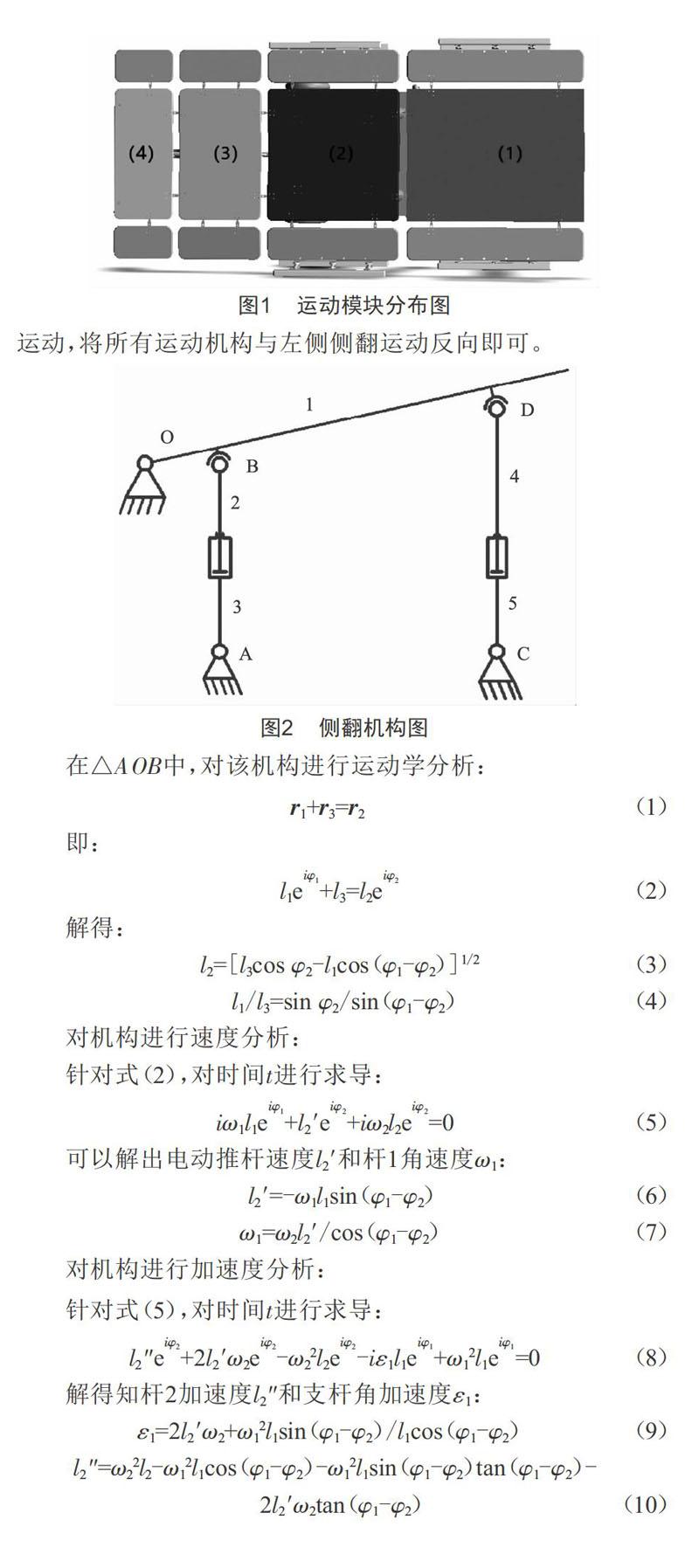
该新型多功能护理床要求满足起背、翻身和曲腿等功能,所以将床板分成12块单独运动的模块,如图1所示。图1中(1)号模块为背部板,长×宽×高=800 mm×600 mm×15 mm,最大起背角度为85°;(2)号模块为臀部板,长×宽×高=600 mm×600 mm×20 mm,最大旋转角度为30°;(3)号模块为大腿板,长×宽×高=380 mm×600 mm×10 mm,相对臀部板的最大旋转角度为30°;(4)号模块为小腿版,长×宽×高=270 mm×600 mm×10 mm,相对大腿板的最大旋转角度为20°。
2 重要结构设计
2.1 侧翻机构设计
侧翻机构如图2所示。在臀部板下端安装4个电动推杆,推杆两端都采用球铰链连接,球铰链的锁紧和放松由电磁铁控制。当进行左侧侧翻运动时,推杆2、4以一定比例的速度伸长,1号杆就是臀部板,将绕着O点进行旋转运动,使板逐渐倾斜,直至到达规定角度,最终完成左侧侧翻运动。若执行右侧侧翻运动,将所有运动机构与左侧侧翻运动反向即可。
在△AOB中,对该机构进行运动学分析:
r1+r3=r2 (1)
即:
l1e+l3=l2e (2)
解得:
l2=[l3cos φ2-l1cos(φ1-φ2)]1/2 (3)
l1/l3=sin φ2/sin(φ1-φ2) (4)
对机构进行速度分析:
针对式(2),对时间t进行求导:
iω1l1e+l2′e+iω2l2e=0 (5)
可以解出电动推杆速度l2′和杆1角速度ω1:
l2′=-ω1l1sin(φ1-φ2) (6)
ω1=ω2l2′/cos(φ1-φ2) (7)
对机构进行加速度分析:
针对式(5),对时间t进行求导:
l2"e+2l2′ω2e-ω22l2e-iε1l1e+ω12l1e=0 (8)
解得知杆2加速度l2"和支杆角加速度ε1:
ε1=2l2′ω2+ω12l1sin(φ1-φ2)/l1cos(φ1-φ2) (9)
l2"=ω22l2-ω12l1cos(φ1-φ2)-ω12l1sin(φ1-φ2)tan(φ1-φ2)-
2l2′ω2tan(φ1-φ2) (10)
根据计算结果,可知不同的t时刻电动推杆或板的线速度、角速度、加速度和角加速度。以上结果也为以后的模拟器仿真分析提供了进一步的数据支撑,验证了机构在运动时速度和加速度的稳定性,确保了设计机构的合理性和可靠性。
2.2 曲腿机构设计
曲腿机构如图3所示。采用两个电动推杆,3号电动推杆主要用于大腿板的运动,5号电动推杆主要用于臀部板的运动。电动推杆5以一定比例的速度运动,使杆1绕A点进行逆时针旋转,同时也可以单独控制电动推杆3拉动杆2使它绕铰接点进行顺时针旋转。两电动推杆均可单独运动,以便使用者得到最舒适的曲腿动作。
在△CDE中,对该机构进行力学分析:
r1+r3=r2 (11)
即:
L1e+L3e=L2e (12)
解得:
L3=[L32-L12-2L1L2cos(φ1-φ2)]1/2 (13)
φ3=arctan(L2sin φ2-L1sin φ1/L2cos φ2-L1cos φ1) (14)
对机构进行速度分析:
针对式(12),对时间t进行求导:
iω1L1e+L3′e+iω3L3e=iω2L2e (15)
可以解出电动推杆速度L3′和杆3角速度ω3:
L3′=ω2L2sin(φ1-φ3)-ω1L1sin(φ1-φ3) (16)
ω3=[ω3cos(φ1-φ3)-ω1cos(φ1-φ3)]/L3 (17)
对机构进行加速度分析:
针对式(15),对时间t进行求导:
iL1ε1e-L1ω12e+2iL3′ω3e+iε3L3e-L3ω32e+L3"e=
iL2ε1e-L2ω32e (18)
解得知桿3加速度L3"和支杆角加速度ε3:
L3"=ε1L1sin(φ1-φ3)-ω12L1cos(φ1-φ3)-L3ω32-
ε2L2sin(φ2-φ3)+ω22L2cos(φ2-φ3) (19)
ε3=[ε2L2cos(φ2-φ3)-ω22L2sin(φ2-φ3)-2L3′ω3+
ε1L1cos(φ1-φ3)+ω12L1sin(φ1-φ3)]/L3 (20)
通过对机构位置、速度和加速度的分析,得到了任意时刻t对应的各构件角速度和角加速度变化关系,为后续的控制过程做好了数据准备。
3 关键部件有限元分析
新型多功能护理床结构设计完成后,对球铰链和支撑板进行有限元分析。
3.1 球铰链有限元分析
球铰链作为连接部件,要保证其强度符合设计标准。将球铰链底座进行网格化处理,球铰链底座在受到500 N压力时,其构件的受力情况如图4所示,变形位移量如图5所示。
球铰链底座在最大受力500 N下,最大压应力为1.89 MPa,远小于材料屈服应力530 MPa,材料最大变形量为1.148×10-4 mm,满足功能性和安全性要求。
3.2 支撑板有限元分析
板块主要支撑对象为人体,所以臀部板在受最大外力700 N时,该构件的应力情况如图6所示,臀部板在受力情况下变形位移量如图7所示。
推杆在最大受力700 N下,最大压应力为11.65 MPa,远小于材料屈服应力27.57 MPa,材料最大变形量为1.137×10-2 mm,满足功能性和安全性要求。
4 结语
本文对新型多功能护理床的结构设计进行了介绍,主要详细说明了侧翻机构和曲腿机构的设计并进行了运动学分析,证明了设计的可行性和运动时的平稳性。随后对关键部件进行有限元分析,确定所设计的结构拥有足够的强度和刚度,安全性能得到保障。一系列的设计、验算和校核证实了新型多功能护理床在理论上的可行性,并为以后继续深入研究提供了理论依据。
[参考文献]
[1] 郎建志,孙硕伟,李欣泽,等.多功能护理床的结构设计[J].机电信息,2019(18):132-133.
[2] 冯健,包仁人.多功能护理床机构设计及仿真[J].中国新技术新产品,2019(6):98-99.
[3] 朱爱洁.多功能智能护理床研制[D].合肥:合肥工业大学,2018.
[4] 任久帅,王继荣,李军,等.多功能护理床的机构设计和运动分析[J].青岛大学学报(工程技术版),2017,32(1):108-111.[5] 马凯.多功能护理床的功能延伸及造型设计[D].天津:天津科技大学,2015.
[6] 徐慧,李重根,郭琼,等.老年人护理床的功能需求调研与分析[J].包装工程,2015,36(20):74-78.
[7] 张建云,陶卫军,吴卫兵,等.多功能护理床结构设计研究[J].机电工程,2015,32(9):1186-1191.
[8] 陈磊,朱淑云,张华,等.多功能护理床抬背机构设计与仿真[J].机械设计与制造,2013(9):94-96.
[9] 江豪,王威,刘永平.多功能护理床的研究与开发[J].微计算机信息,2006,22(20):117-119.
收稿日期:2020-07-09
作者简介:何磊(1998—),男,四川绵阳人,研究方向:机械设计。
通信作者:韩庆珏(1980—),男,河南新乡人,博士研究生,讲师,从事车辆动力学、车辆自主导航、路径规划与路径跟踪控制等研究工作。
