基于物联网的智慧物流监测系统
2020-10-09霍文慧李敬兆
霍文慧 李敬兆


摘 要:为了解决物流运输过程中货物状态实时监测困难和物流监测设备功能单一、可扩展性不强等问题,提出了一种基于物联网(IoT)的智慧物流监测系统。系统由监控终端、无线通信单元和云平台组成。监控终端集成了微处理器模块、温湿度传感器模块、GPS模块、光照强度传感器模块等。无线通信模块用来接收物流监控终端的数据并上传至云平台。云平台实现海量物流数据的采集、存储、分析、处理和可视化。定位模块采用基于卡尔曼滤波算法的数据融合技术,实现车辆在复杂环境下的准确连续定位。数据处理采用一种基于LZW的数据压缩算法,实现海量数据的无损压缩。该系统的使用提高了物流监测的实时性和系统性,可协助管理人员对物流环境信息进行实时监控。
关键词:嵌入式;传感网络;GPS;云平台;融合算法;NB-IoT
中图分类号:TP274+.2文献标识码:A文章编号:2095-1302(2020)09-00-05
0 引 言
在高速发展的现代社会中,随着我国对外出口量的增加,传统的物流已无法满足人们的需要,智慧物流应运而生。无论是在物资的制作、储备过程中,还是在物资的运输和出售过程中,智慧物流都能够通过物联网技术发挥其相应的作用[1]。
在当前的物流业中,最为常见的仍属射频识别和定位技术,此外,随着科技的进步,越来越多的技术将应用于物流业中。例如,通过传感技术监测物流的温度、安全,通过视频识别和不同机器之间的传递进行各环节间的协调合作,以及远程蓝牙传送信息等[2]。物流信息在物联网上的全面感知、安全传输和智能控制可实现物流信息管理到物流信息控制的飞跃[3]。
国外车辆运输监控系统开发的较早[4],在信息技术方面已经实现了将物流监控系统应用在对物流车辆的实时监控上[5]。相比之下,国内物流运输水平相对落后,但随着近年来GPS技术、通信技术以及Internet技术发展逐渐走向成熟,获取车辆信息方面的能力得到显著提高。针对传统车载GPS导航定位丢失信号问题,韩如坤给出了一种建立在模糊投票方式基础上的GPS和IMU相结合的定位方式,充分消除了采用单一传感器无法进行精确定位的问题[6]。刘旭等人建立了适用于车辆导航系统的基于UKF(Unscented Kalman Filter)的GPS/DR(Global Positioning System/Dead Reckoning)组合定位滤波模型及算法[7],可应用在物流运输的车辆上。
在数据压缩方面,由于无线传感器中的感知数据具有数据量大、冗余度高的特点,而使用数据压缩能有效去除冗余数据[8]。解瑞云提出了一种利用自适应Huffman与Golomb-Rice混合编码的快速高效无损自适应压缩算法[9],可用于监控系统产生大量数据时对服务器运行速度造成影响的情况。
基于此,本文提出了一种基于物联网的智慧物流监测系统,运用传感器技术、无线网络传输技术、云计算技术等[10]搭建了一个监测物流运输过程中环境信息变化的系统[11],该系统除了强调对物资信息的快速实时采集之外,还可以对运输工具工况、无线通信环境、GPS定位环境等情境信息进行综合评估,以实现物流监测数据的稳定上传和异常状态的及时预警[12]。
1 系统结构
基于物联网的智慧物流监测系统架构如图1所示。
该系统由物流车载终端、数据传输模块以及物流监控中心组成。
物流车载终端包括多种传感器,可完成对物流运输过程中温湿度、光照强度、车辆倾斜度的数据采集;定位模块负责采集车辆的位置信息;本地存储单元对信息进行存储;车载电源作为监测终端的供电电源。
数据传输单元采用NB-IoT作为无线通信模块,传感器通过I2C通信接口上传数据至STM32 MCU,MCU通过NB-IoT通信模块将采集的数据上传至云平台数据库。
物流监控中心包括访问终端和云服务器。云服务器完成数据的存储和处理,访问终端与云平台完成数据交互以及对车辆环境数据的监测、管理、异常报警等服务。
2 硬件设计
物流车载监测终端主要由STM32、本地存储模块、传感器模块、GPS定位模块、NB-IoT通信模块以及外围电路组成。硬件结构如图2所示。
2.1 微控制器
本次应用的微处理器为STM32,其作为系统的主控,不仅承担着处理信息的责任,还肩负着沟通不同模块的任务。其需要在高电压和高消耗的情况下保持强大的功能,通过各端口与模块相连,将所得数据进行综合处理后传达出去。其优势在于较小的开发成本和极高的性价比。
2.2 本地存储
实时采集数据并进行上传是我们关注的重点,在网络发生波动时,数据上传至云平台后,应当对所有数据备份,以防数据错误上传和数据丢失。
本系统采用容量为4 MB的Micro SD卡(又称TF卡),TF卡存储的数据通过USB端口导出到PC端。
2.3 传感器模块
为了确保在移动终端中实时监测物流的各类信息,我们在设计过程中加入了温湿度传感器,用以监测物流的温湿度,通过惯性传感器测量车辆的加速度,通過光照强度传感器检测物流受光照的强度及时间,此外,冲击振动和倾角也能够在移动终端中有所体现。其中,温湿度传感器采用DHT22,单总线DATA引脚外接上拉电阻与主控芯片I/O口,采集物流运输过程中的温湿度信息。光照度传感器选用BH1750,内置A/D转化器,与主控芯片采用I2C总线协议通信,采集物流运输过程中的光照强度数据。惯性传感器选用MPU-6050六轴加速度传感器,采集物流运输过程中的倾斜角度以及加速度等信息。
2.4 定位模块
本次系统针对定位模块提供了多种选择,为了最大限度减少中间障碍物对定位的影响,选用中科微STGM332D GPS定位模块监测车辆当前实时位置(经纬度)、行驶速度、海拔高度等,其与主控芯片通过串口通信。在运输途中遇见障碍物时GPS信号较弱,影响对物流车辆位置监控的实时性,此时采取航位推算法(惯性传感器MPU6050)计算物流车辆的位置信息。
2.5 通信模块
通信模块选用NB-IoT模块进行数据的远程无线传输。NB-IoT模组选用BC95模块,模组支持UDP和CoAP协议,与主控制器之间通过串口通信,将无线传感网络收集的数据先发送到NB-IoT网络,再发送到云服务器,实现数据转发。
3 双模组合定位设计
由于城市房屋的相互遮蔽,致使卫星信号接收不佳,导致GPS信号缺失,造成物流监测信息无法跟踪和匹配。为了完善对车辆的实施追踪,需要提高定位精度以获取更为精准的定位信息。而获取的物流车辆的位置信息也可为运输路径的选择提供数据参考。本文介绍了一种基于扩展卡尔曼滤波算法的双模定位方式,取代单GPS定位。组合定位总体结构如图3所示。
3.1 卡尔曼滤波算法步骤
该算法为递归的估计算法,原因在于它能够通过对前一状态的分析处理预测出下一状态。但在运行该算法之前,需要得知前一状态的估计值,同时,当前状态的具体值也至关重要。当前状态的估计值受当下状态测量值的影响。
在离散变量中,卡尔曼滤波具有一定的针对性。因此,不论是线性随机微分方程还是测量噪声甚至是過程噪声,卡尔曼滤波器均为第一选择。
3.2 卡尔曼滤波处理数据分析
定位模块接收GPS信号,当GPS信号强时,μCOS系统读取GPS模块数据,通过执行数据发送任务将信息发送到云计算平台;当GPS信号弱甚至丢失时,μCOS系统无法通过GPS定位模块获得当前车辆的位置和速度信息,此时需要调用惯性定位任务,以信号丢失前GPS模块获取的车辆当前经纬度、航向角、速度等初始值,通过将惯性传感器获得的三轴(X,Y,Z)加速度和旋转角度数据代入到卡尔曼滤波算法中实现对车辆的定位。定位流程如图4所示。
4 基于LZW的数据压缩算法
在物流运输工作进行的过程当中,数据采集终端始终处于饱和工作状态,因此,终端在长期的物流运输工作过程当中,其作业任务量与终端所承受的压力成正比例关系。可以通过如下两种方式减少数据量以保护数据终端:
(1)减少数据发送的频次;
(2)采取数据压缩方法降低数据的发送量。
由于降低数据发送频率可能会导致漏掉一些重要数据,不适用于物流实时监测的场景,因此本系统选择数据压缩方式降低数据的发送量。
LZW算法是一种基于字典的算法,在编码之前首先需要建立一个字典、一个暂存器P、一个暂存器C。此编码中,P的含义是前一个字符串,C的含义是正在读取的字符串,P和C相加组合的含义是拼接字符串。LZW编码流程如图5所示。
在该算法的使用过程当中,通常情况下用于图片压缩的使用频次较高,4 096为其串表长度,当字符大于255时便进行新的编码,当其大于压缩文件无法处理时,重新生成串表。
4.1 LZW算法的硬件实现
由于在物流运输工作进行的过程中,全部数据都会在终端显示,所以需要对系统的硬件部分进行数据压缩。DMA技术和乒乓思想能够在实现该功能的基础上,确保数据的实时性和准确性。
数据在传输过程中,DMA无需通过微控制器进行控制,也不会中途断开数据传输的内存存取方式,极大地提高了微控制器处理数据的效率。但因为STM32嵌入式功能的限制,RAM区无法对通过DMA通道传出的数据进行操作。因此需要等串口到RAM的数据全部传输完成后,处理核心才能进行数据压缩,导致系统的实时性减弱。该系统运用的是乒乓思想模式,可在微软控制器的闪存区建立2个BUF缓冲区,端口数据通过DMA存入BUF1即可,当BUF1存满后再存入BUF2,同时对BUF1中的数据进行压缩处理,待BUF2中数据存满后再对其进行相关的压缩处理。在处理BUF1或BUF2中的数据时,输出数据缓冲区能够贮存相关数据,处理核心检测到数据处理完毕后,开启另一个DMA通道输出数据。数据流传输方式如图7所示。
4.2 信号压缩比测试
为了测试LZW数据压缩算法在处理不同信号时的压缩比,将已得到的温湿度数据、倾斜度、光照强度、速度、位置数据分别写入不同的文件中,并对这五组数据进行压缩处理。数据压缩比见表1所列。
从上述表格可以看出,由于温湿度和光照强度变化幅度较小,比较容易出现重复的字符,因此压缩比较高,而倾斜度、速度和位置数据变化相对较大,因此产生的压缩比较低。
5 软件系统设计
本次设计主要被应用于移动终端和云平台中,通过对采集并上传的信息进行处理,最终以报告的形式实时显示。通过加强云端数据的处理能力,在降低移动终端压力的同时,维持原有功能,同时提升了用户使用的便利性,方便移动端不停机更新。
5.1 终端嵌入式软件设计
感知终端负责环境信息采集、设备异常检测、数据发送和指令接收,并实现照明设备的开关控制及亮度调节。由于感控终端需要处理的任务繁多,采用常规的程控方式不仅编程复杂,且程序执行效率较低。因此决定在感控终端控制器中移植适合多任务实时管理的μCOS实时操作系统,该系统具备高性能、低成本、高效率的优点。
系统感控终端的环境信息(温湿度、光照强度、倾斜度等)采集任务、异常检测任务、数据发送任务的任务优先级依次递减;设备异常(倾角过大、温度过高、光照过强等)事件作为系统中断触发信号。无事件发生时,μCOS系统依优先级次序运行任务程序,实现车载物流监测终端的情境数据采集及数据上传;当有事件发生时,触发μCOS系统中断,若此时CPU开放中断,则当前任务被挂起,转而执行异常处理中断服务程序。退出中断后,μCOS系统会根据实际情况进行一次任务调度,从最高优先级任务处重新开始程序,但不一定要接续运行被中断的任务。感控终端流程如图8所示。
5.2 云平台监控数据处理
在数据处理过程中,尽量减少数据在移动端的停留,通过加强云平台的处理能力来减轻移动端的处理压力,使用的程序开发语言为C#,系统采用B/S架构,使用DevExpress控件與Winform控件相结合的方式构建出一个综合物流信息监测预警平台。该平台主要进行温湿度、倾斜度、光照强度的分块显示,运输车辆实时速度和定位的显示,以及制定监控方式、生成报表等。物流设备管理平台界面如图9所示。
6 基于云平台的物流监控系统
以物流运输车辆流程设计为例,前期需要完成订单绑定、设定预留监控策略、添加人员信息等操作,在运输过程中对其实施监控,通过云平台对订单进行统一管理,在到达目的地后解绑,同时每个移动终端在开机状态下可以通过云平台查看状态。物流监测系统包括三部分,即物流信息管理模块、物流信息添加模块、物流监测预警模块。
物流信息管理模块主要对物流人员信息、物流位置信息,以及温度、湿度、倾斜度等信息进行实时监测,并将数据存储到数据库中(使用本地搭建的数据库),然后对数据进行初步处理与分析,最终进行科学预警。
物流监测预警模块对各运输物品当日每一时刻的车内温度、湿度、物品倾斜度等数据进行监测,在绑定相应的移动终端后,云平台会自动分析并制定出最合适的监控方案,设定预警值,实时掌握车辆各类数据。数据集中存储并初步分析后,若连续出现超过规定阈值的数据,则系统判定物流过程出现异常,通过发送短信的方式通知监控人员及时处理,实现实时科学预警。
本设计的测试分为物流监测终端测试和物流监测管理平台测试。测试使用的软件包括串口调试助手、Keil编程软件和云平台。串口调试助手用于查看相关传感器采集的数据和NB-IoT传输的数据,获得串口调试结果;Keil编程软件用于驱动程序修改和烧录;云平台用于登录测试数据上云处理、数据下发、消息推送。
图9所示为测试时的物流设备管理平台界面。界面包括物流监测终端携带的多种传感器以及其他功能模块,测试数据包括光照强度、温湿度、倾斜度、振动程度、NB-IoT入网测试数据等。
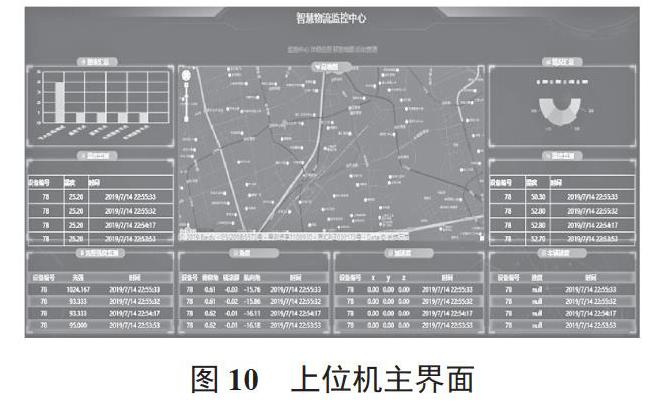
物流监测终端数据采集功能和数据传输功能实现后,进行物流监测管理平台测试。物流信息监控平台界面如图10所示。
7 结 语
目前,物流感知终端的传感器部分已经能够实现对物流环境的温湿度、光照强度、振动幅度以及倾斜程度进行监测。通过运用扩展的卡尔曼滤波实现了惯性传感器和GPS的组合定位,车辆定位系统的性能得到大幅改善,可确保监控车辆在复杂环境下连续定位。通过基于字典的LZW数据压缩算法实现了数据压缩上传,通过NB-IoT技术实现了对物流运输环境的实时监管。随着计算机技术、GPS定位技术、通信技术、网络技术等的相互配合,物联网技术被广泛运用于监测和管控系统中,加速了我国智慧物流产业的发展。
参考文献
[1]石亚萍.基于物联网的智慧物流[J].物流技术,2011(9):44-45.
[2]王继祥.物联网发展推动中国智慧物流变革[J].物流技术与应用(货运车辆),2010(3):80-83.
[3]高婧,史方彤,崔茜.基于物联网的物流配送业务流程再造研究[J].物流技术,2011(12):25-27.
[4]王微微.国内外农产品冷链物流发展的比较与借鉴[J].对外经贸实务,2012(4):90-92.
[5]赵家胤,阴法明,邾文杰,等.物联网智能物流车辆监控系统的研究与开发[J].电子器件,2019(4):1046-1050.
[6]韩如坤.基于GPS与IMU组合传感器数据融合的有轨电车定位分析[J].自动化技术与应用, 2019(8):65-68.
[7]刘旭,张其善,杨东凯,等.一种用于GPS/DR组合定位的非线性滤波算法[J].北京航空航天大学学报,2007,33(2):184-187.
[8]龙胜春,龙军.一种应用于无线传感器网络的数据压缩方法[J].浙江工业大学学报,2014(2):210-213.
[9]解瑞云,海本斋.基于自适应霍夫曼和Golomb-Rice混合编码的WSN无损压缩算法[J].计算机工程,2016(7):86-93.
[10]曹博.基于物联网的物流实时定位系统[J].信息技术,2018,42(10):103-106.
[11]梁琨,肖宏伟,杜莹莹,等.基于物联网技术的果蔬冷链物流实时监测系统[J].江苏农业科学,2015,43(11):519-521.
[12]刘雄飞,聂伟,陈浩,等.基于云计算平台的室内环境监测系统设计与实现[J].传感器与微系统,2019,38(3):92-95.
