基于三种最优控制方法的磁悬浮球轨迹跟踪方法
2020-10-09陈兴贤余伟
陈兴贤 余伟


摘要:详细介绍了磁悬浮球系统的结构和工作原理,提出了磁悬浮球系统的物理模型和数学模型,并以此为依据分析系统的稳定性及控制方案的选择,最后在MATLAB/Simulink环境下建立了系统仿真模型以研究控制系统的轨迹跟踪及输入信号的性能指标。为了实现对磁悬浮球系统的快速,精准,稳定的轨迹跟踪控制,提出了基于三种不同控制方法设计一种为基于状态反馈的极点配置和两种PID最优控制模型,以实现对轨迹跟踪稳定更加完美的实现,并通过仿真实验分析对比几种控制器的性能指标,进而对整体控制方案设计给予合理性建议。实验表明,三种控制方法虽然在控制方向和目的上各有偏颇,但是都可以稳定实现控制目标,而且都可以通过对控制器的相关指标改变系统的稳定性指标。
关键词:磁悬浮球系统;最优控制;极点配置;Simulink仿真
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2020)22-0010-04
开放科学(资源服务)标识码(OSID):
磁悬浮技术是集电磁学、控制工程、信号处理、机械学、动力学等多门学科于一体的新型高科技技术。磁悬浮技术因其无接触、无摩擦等特点而具有能耗低、污染小、噪声小等优点,因此在各领域被广泛应用。
本文就基于磁悬浮球系统本身的不稳定性出发,研究非线性不稳定系统实现跟踪目的研究的一般方法。首先,从极点配置理论出发,通过状态反馈器设计实现极点的任意配置,从而达到系统稳定性要求。接着,从控制目标的角度研究极点的选择,即提出最优控制方法。进而采用误差指标最小化函数进行最优控制结合极点配置思想使系统稳定的前提下提出两种最优控制模型,实现系统的轨迹跟踪控制目标。最后通过MAT-LAB提供的实验模拟仿真实验对控制效果进行模拟仿真,通过对比提出关于磁悬浮球跟踪系统的最优控制方案。
1 磁悬浮球系统工作原理
如图1所示为磁悬浮球控制系统的基本控制流程图模型。
由于磁悬浮球控制系统本身的不稳定,使得闭环控制成为必然。上述实验装置是通过传感器实时获取小球位置信号x(t),接着,通过感受x{t)的变化来指导控制器产生控制信号u,然后,驱动器会跟踪感受到的控制信号u实时控制其产生的控制绕组产生所需电流i(t),进而以此来控制电磁铁产生电磁力的大小。当系统受到扰动信号,比如,当小球受到干扰向下偏离目标运动轨迹时,位置信号x(t)会跟着实时变化增大,与此同时传感器传递给控制器的信号增大,使其输出信号u增大。随着控制信号u的变化,驱动器跟着变化,处理后控制电流变化,进而指导绕组产生更大的电磁力,最后小球被吸回平衡位置,此时小球又会回到控制目标。如此反复从而形成一个闭环控制流程。
本文将以小球位移x(t)为输出,电压u为输入进行控制设计。
2 磁悬浮球控制系统的一般物理模型的建立
本文选取其中一种磁悬浮小球控制系统的系统空间模型进行控制器的设计。
选取的空间状态模型为:
3 线性控制器设计
由于磁悬浮球系统本身的不稳定性,首先提出极点配置控制思想,设计控制器使系统稳定。进而分析此时的磁悬浮球系统是否可以完成轨迹的跟踪的目的。
不仅如此,本文还基于轨迹跟踪目标的实现,在系统稳定的前提下,设计误差最优化函数,提出最优PID控制器。
3.1 极点配置控制
已知状态空间模型,设计状态负反馈,控制输入为:
为了验证系统极点分布对系统动态特性的影响,可在MATLAB/Simulink中建立模型来进行模拟仿真实验。
3.2 最优PID控制一基于ISE,ITAE控制的最优PID控制器
经上述分析可知,对于轨迹跟踪问题,仅仅是控制系统的稳定性控制显然不足以描述跟踪全貌。轨迹跟踪的核心研究应该是控制轨迹与目标轨迹的贴合度,即误差控制。基于最优控制思想,最优控制可以使轨迹跟踪系统按照控制跟踪误差最小化的目标要求进行最优化控制,在控制系统稳定的前提下,提出基于ISE,ITAE控制方法的最优PID控制器。
最优PID控制器的传递函数为:
式中,Kp为比例系数;Ki为积分系数;Kd为微分系数。
PID控制器则是集中体现比例,积分,微分控制器的优点,所以用于设计最优控制器十分合适。
ISE控制选用性能指标为动态误差信号的积分指标为:
即ISE为同等时间处理各个时刻的误差。
所以,ISE控制思想为在系统稳定前提下寻求控制轨迹跟踪的误差最小化,即轨迹跟踪的贴合度最大化。
ITAE控制器选用性能指标为动态误差信号的积分指标
则ITAE对时间加权,时间t大,会迫使误差降下来。其余设计与上述ISE控制器设计类似。
所以,lTAE控制器设计目标与ISE控制器目标一致,都是求跟踪轨迹的最优曲线。具体计算可以借助MATLAB强大的计算功能进行最优PID控制器三个参数的计算。进而,设计Simulink仿真模型。
最优PID控制的伺服控制框图如图2所示。
其中G(s)为已经经过极点配置的稳定的磁悬浮球控制系统的传递函数;Gc(s)为最优控制器传递函数,控制器描述为
4 仿真实验
4.1 极点配置法
Simulink中的仿真模块图为图3所示。图4为极点配置在-10,-10使,若初始时刻系统存在幅值為5的扰动时系统想响应曲线。由响应曲线可知,经过极点配置系统的运行可以保持稳定,即极点配置的目的达到。图5为极点配置在-10,一10;-20,-20时对应的阶跃响应曲线,由图可知,两条曲线都可以达到稳定系统的效果,但是都不能很好跟踪目标曲线。
4.2 ISE控制器与ITAE控制器
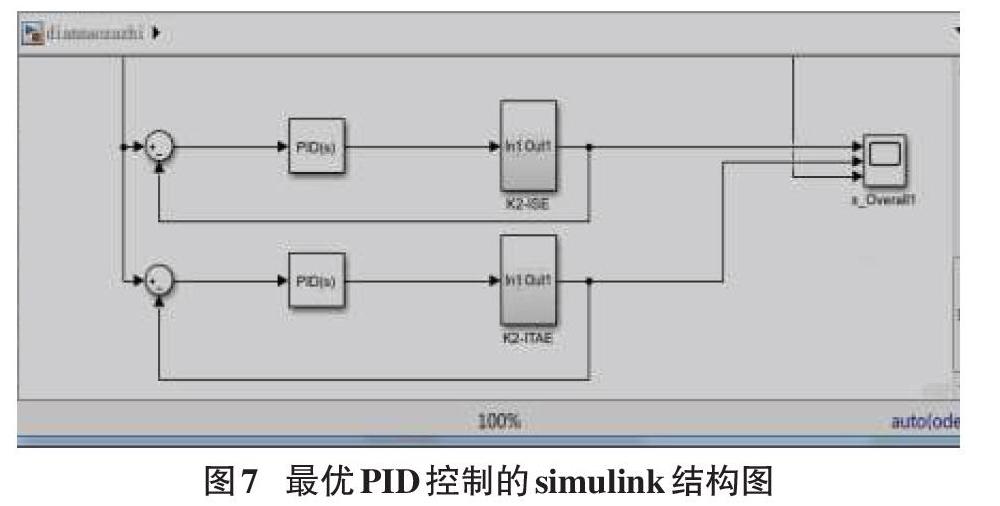
图6为最优PID控制器对应的系统的仿真结构图。两种最优PID控制的实验将选取极点配置在-20,-20时的稳定系统进行调节,跟踪,观察,控制,且其实验数据记录于图2。
Simulink仿真结构如图7所示。
其中,Matlab中程序设计为:
ISE指标:(K4为极点配置在-20, -20时的稳定系统)
1),函数
function y=c7fOpt(x,s,G,t)
Gc=x(1)+x(2ys+x(3)*s;E=1/( I+G*Gc);
yO=step(E,t);y=sum(y0.^2)*(t(2)-t(l》;
2)matlab工作空间
s=tf(‘s);
>> G=tf(ss(A-B*K4,B,C,D》
>> t=0:0.02:30;x=fminunc(@c7fOpt,[l,l,l],optimset,s,G,t)
ITAE性质指标:
function y=c7fOpt2(x,s,G,t)
Cc=x(l)+x(2ys+x(3)*s;E=1/(I+G*Gc);
yO=step(E,t);y=t8abs(y0)8(t(2)一t(1));
工作空间:
x=fminunc(@c7fOpt2,[1,1,1],optimset,s,GJ)
4.3 轨迹跟踪控制对比
由响应曲线图,图8,图9可知,极点配置方法通过改变特征值(即开环极点)可以使系统稳定,但是在轨迹跟踪上始终存在设计误差;而最优PID控制器在极点配置的思路上进行误差最小化处理,即在系统稳定跟踪的基础上更加贴合目标轨迹,使控制系統更加接近控制目标。
从图8也可以看出,进行极点配置可使系统达到稳定状态,但是都没能实现轨迹跟踪的目的;与此同时选择不同的最优控制性能指标,都可以在系统实现稳定跟踪的基础上通过对系统误差的调节实现稳态精度的提升,但是其最终系统响应的稳定误差范围在选择不同控制函数的选择上也有所不同。可以看到,在ISE指标控制设计下,响应曲线存在毛刺,而在ITAE指标控制设计下,轨迹跟踪目标可以相对完整地体现出来。
5 总结
本文首先通过对磁悬浮球控制系统的状态空间模型进行简单分析,得知磁悬浮球控制系统本身存在极点位于复平面右半平面的情况,根据系统稳定性判据可知系统不稳定。
一开始,对系统进行可控性分析得知磁悬浮小球系统完全可控,利用极点配置思想,使不稳定的磁悬浮球系统通过设计系统不稳定的极点移动到指定位置(即复平面左半平面),使其稳定。此时分析系统是否可以达到轨迹跟踪的目标,发现极点配置可以使系统稳定,但是轨迹跟踪的误差非常大。
紧接着,在控制方法角度切换,结合极点配置思想和最优控制思想,提出最优PID控制器。并设计出两种最优误差控制函数-ISE,ITAE。进而通过在MATLAB中设计计算算法,实现最优PID控制器的相应指标。
最后,本文采用软件Simulink进行实验仿真得到不同参数下的输出响应,进而进行了相关数据分析。试验表明,两种控制方法虽然在设计的目的和方向上存在差异,但是都可以实现系统的稳定控制。
参考文献:
[1]赵宁.磁悬浮控制系统分析与设计[D].沈阳:东北大学,2010:2-3.
[2]王义进.基于DSP磁悬浮球控制系统的设计与研究[D].厦门:厦门大学,2007:1-2.
[3] lsidori A.Nonlinear control systems[Ml. London: Springer Lon-don, 1995.
[4] Haddad W M,Chellaboina V.Nonlinear dynamical systems andcontrol[M]. Princeton: Princeton University Press, 2008.
[5] Malisoff M,Mazene F.Constructions of strict Lyapunov functions[M]. London: Springer London, 2009.
[6] Freeman R A.Kokotovic P V.Robust nonlinear control design:state-space and Lyapunov techniques[EB/OL].1996
[7] Ioannou P A,Sun J.Robust adaptive controI[EB/OL].1995
[8] Sepulchre R,Jankovic M,Kokotovic P V.Constructive nonlinearcontroI[M]. London: Springer London, 1997.
[9] van der Schaft Arjan. Passivity by feedback[M]//L2 - Gainand Passivity Techniques in Nonlinear Control. London:Springer London, 2000: 125-136.
[10]古文生,王峰,周全,等.基于LQR控制的机器人自行车静态平衡研究[J].电脑知识与技术,2020,16(4):192-194.
[11]王翼,张凤登,吉妍,等.基于极点配置与最优控制的磁悬浮系统控制器[Jl,软件,2019,40(7):1-7,88.
[12]刘小河,管萍.先进控制理论[M].北京:清华大学出版社,2019.
【通联编辑:唐一东】
基金项目:国家基金项目编号:61803086
作者简介:陈兴贤(1998-),女,本科生,主要研究方向:电气工程及其自动化;通讯联系人:余伟(1983-),男,讲师,主要研究方向:系统建模和智能控制算法。
