基于激光扫描技术的无砟轨道离缝智能检测小车研发
2020-10-09许国平林超
许国平, 林超,2
(1. 中铁第四勘察设计院集团有限公司,湖北武汉 430063;2. 铁路轨道安全服役湖北省重点实验室,湖北武汉 430063)
0 引言
CRTSⅡ型板式无砟轨道应用于京津、京沪、沪杭、宁杭、杭甬、杭长等10 多条高速铁路,正线总延展里程约1 万km。CRTSⅡ型板式无砟轨道总体使用情况良好,但在温度、列车荷载等综合作用下,随着线路运营时间延长,局部地段砂浆层出现离缝[1-3],影响轨道结构整体性、稳定性、平顺性,给线路正常运营带来安全隐患。
目前,高铁工务部门对CRTSⅡ型板式无砟轨道砂浆层离缝检测,主要采用人工巡检方式。这种方式消耗大量人力,漏检率较高,精度较低。虽然近年来国内外相关研究单位提出采用超声导波[4-5]、冲击回波[6]、地质雷达[7]、动检数据分析[8]等检测方法,但检测效果仍无法满足现场大范围使用的要求。
离缝检测存在普遍问题,研发针对CRTSⅡ型板式无砟轨道砂浆层离缝检测的智能小车,实现天窗时间高效率、高精度识别离缝,可为高速铁路的安全运营提供技术保障。
1 检测主要技术难点
CRTSⅡ型板式无砟轨道砂浆层离缝检测存在一些技术难点。
1.1 离缝检测精度要求高
根据现场调研及统计[9],CRTSⅡ型板式无砟轨道砂浆层离缝值一般为1~3 mm,现场需要识别1 mm以上的离缝,因此要求离缝检测精度≤0.5 mm。
1.2 离缝状态复杂多样,位置具有随机性
高速铁路穿越不同的气候带,存在路基、桥梁、隧道等复杂线下基础,在列车、温度荷载等外界因素作用下,不同区域的砂浆层离缝状态及发生、发展规律各不相同,导致离缝出现的位置具有随机性,要求检测方法可适用于全线各种状态的离缝检测。
1.3 部分离缝与裂纹、混凝土掉块的区分难度大
砂浆层离缝附近往往伴随有裂纹或混凝土掉块。以图像识别法为例,针对固定位置离缝识别精度可达0.1 mm[10],但识别过程中会误把轨道板侧面的裂纹、混凝土掉块等当作是离缝,区分难度大,造成误测,因此需要人工介入,降低了识别效率。
2 功能及技术指标要求
2.1 功能要求
根据CRTSⅡ型板式无砟轨道离缝检测存在的技术难点,要求离缝智能检测小车满足以下功能需求:
(1)离缝智能检测小车依靠人力推动前进。在线路检测前,可将待测线路的轨道数据(轨道板编号及对应里程)输入至小车数据库。小车具备定位功能,在移动检测过程中根据定位信号自动获取当前位置的轨道板编号和对应里程,将离缝检测结果在数据库内与轨道板编号和里程对应。
(2)与路基地段相比,桥上CRTSⅡ型板式无砟轨道存在侧向挡块,因此离缝智能检测小车在移动检测过程中需要对侧向挡块自动进行避让。
(3)离缝智能检测小车用户界面要实时显示当前线路位置的轨道板编号和离缝值,当离缝值超过预警门限值时,需实时进行报警。检测完成后,数据通过4G 网络上传至云服务端,同时在本地直接生成统计报表。
2.2 技术指标要求
离缝智能检测小车需要满足以下主要技术指标:
(1)测量精度:≤0.5 mm;
(2)测量速度:≥3 km/h;
(3)测量点数:≥8个/每块轨道板;
(4)定位误差:≤±50 cm/km;
(5)连续工作时间:≥6 h;
(6)适用气候条件:满足雨天、雪天和大风天气的正常使用。
3 硬件设计
3.1 总体结构
高速铁路无砟轨道离缝智能检测小车结构示意见图1。主要包括小车车架(1#)、控制系统(2#)、检测系统(3#)、升降系统(4#)、定位系统(5#)和显示系统(6#)。
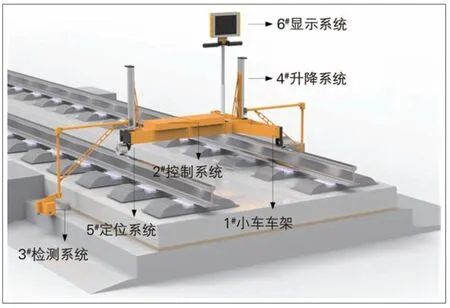
图1 离缝智能检测小车结构示意图
小车通过人力推动前进。检测系统安装在升降系统上,对轨道砂浆层离缝状态(离缝宽度和深度)进行实时检测。控制系统控制升降系统对侧向挡块等障碍物进行躲避,同时将检测系统的检测结果实时反应至显示系统。定位系统进行小车里程定位。小车各系统间可组装和拆解,运输携带方便。
3.2 升降系统和检测系统
升降系统(4#)(见图2)由滑台(7#)、电机驱动模块(8#)、支架(9#)等部件组成,主要控制检测系统(3#)避开线路上侧向挡块等障碍物。
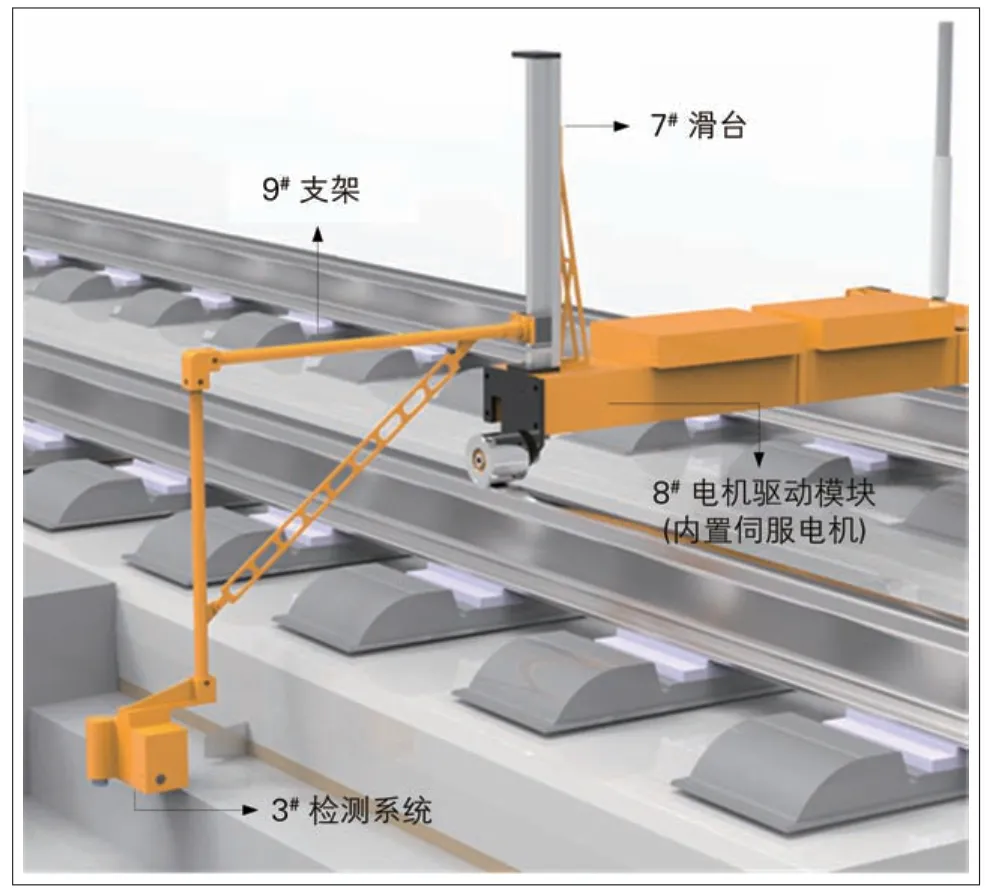
图2 升降系统(4#)结构组成示意图
检测系统(3#)(见图3)安装在支架上,由前端位移传感器(3-1#)、激光轮廓仪(3-2#)及高度位移传感器(3-3#)等部件组成,激光轮廓仪测量距离为152~248 mm,测量精度为±96 μm。检测系统在行进路线上出现侧向挡块等障碍物时,前端位移传感器识别障碍物距离。当检测系统与障碍物距离≤65 cm 时,电机驱动模块带动支架在滑台内向上抬升,同时高度位移传感器识别与障碍物的垂向距离;当小车通过障碍物后,电机驱动模块带动支架在滑台内向下回到预设测量位置;当线路上不存在侧向挡块等障碍物时(例如在路基地段),升降系统位置固定不变。
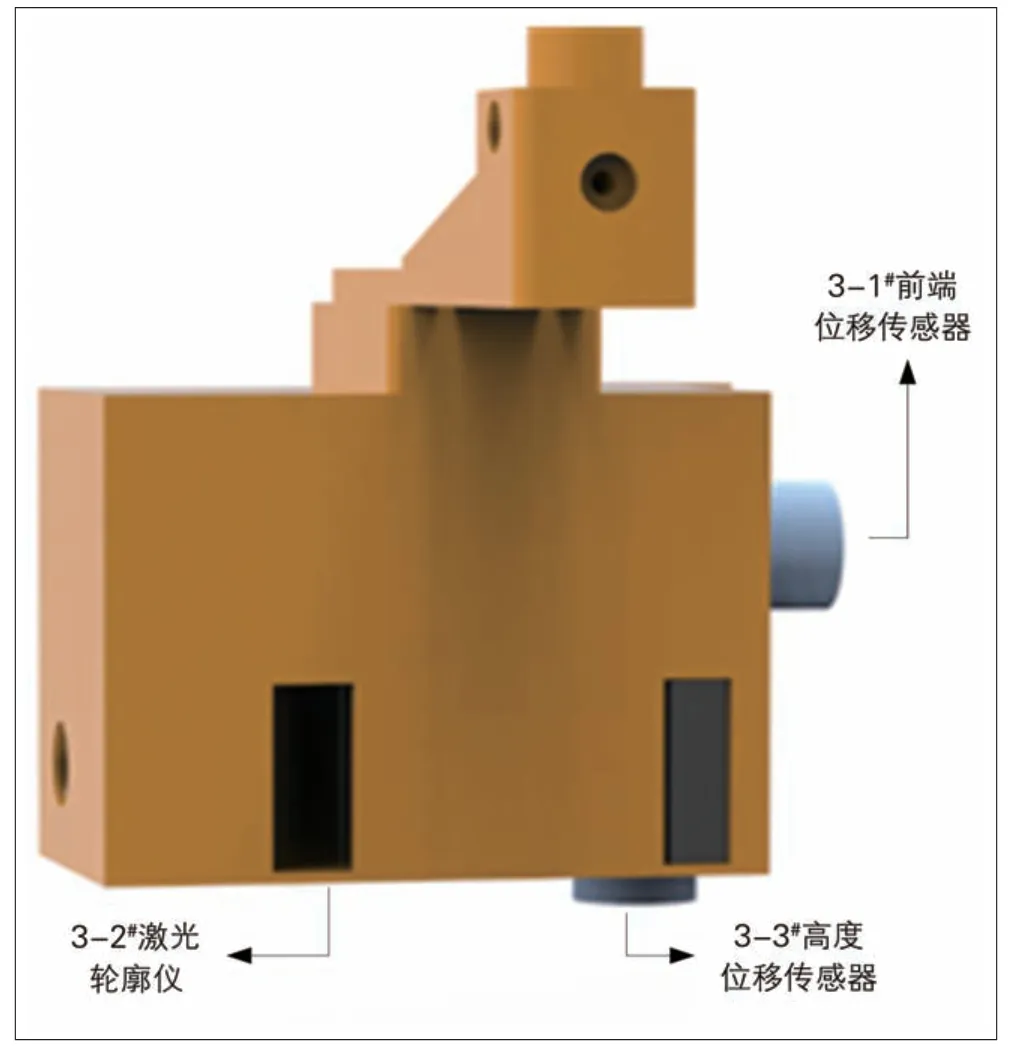
图3 检测系统(3#)结构组成示意图
3.3 控制系统
控制系统(2#)由高性能工控机和供电模块组成。
工控机作为本系统的输入、输出控制中心,采用宽电源输入,能够实时定位及传输数据,控制伺服电机和各类传感器。
供电模块由高容量锂电池和电压转换模块组成,能够满足小车在线6 h以上的工作需求。
3.4 定位系统
定位系统(5#)旋转编码器与车体车轮轴连接,通过检测小车的移动速度,对应换算成车体行进里程。在检测开始前输入起始里程和轨道板编号,并将待测线路的轨道数据(轨道板编号及对应里程)输入至小车数据库,结合数据库便可实现对轨道板离缝检测结果的准确定位。
4 软件设计
高速铁路无砟轨道离缝智能检测小车按工作层级分为上位机软件和嵌入式软件2个部分,上位机软件负责提供人机交互的图形用户接口,嵌入式软件负责小车运行和检测的底层逻辑功能实现。
4.1 嵌入式软件
嵌入式软件作为离缝智能检测小车底层控制单元,其控制逻辑关系(见图4)描述如下:
(1)设备开机后首先进行自检,若设备异常,则提示相关的故障信息;
(2)自检结果正常后,人工推动小车在轨道上前进,离缝数据采集模块自动采集无砟轨道层间离缝数据,行进里程模块记录走行距离,通过单块轨道板长度与行进里程计算经过的轨道板数量;
(3)通过小车检测记录起点对应的轨道板编号以及经过的轨道板数量计算各行进里程对应的轨道板编号,实现离缝数据在存入数据库的过程中与线路里程和轨道板编号对应;
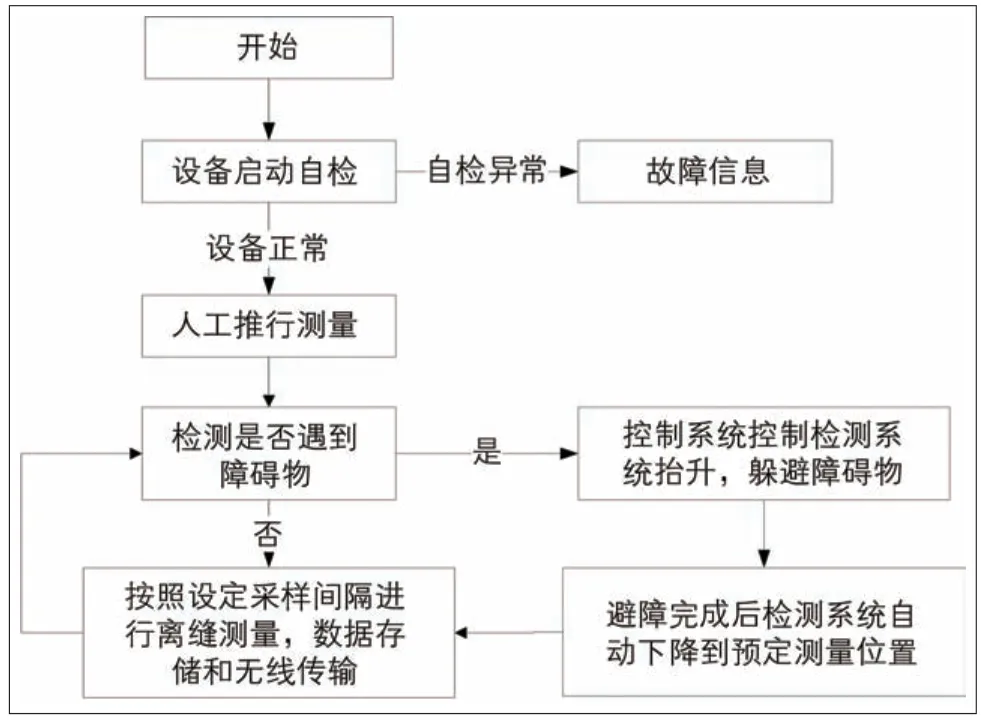
图4 离缝智能检测小车控制逻辑关系示意图
(4)当检测到前方有侧向挡块等障碍物时,控制系统通过电机抬升检测系统自动完成避障。
4.2 上位机软件
离缝智能检测小车识别离缝采用深度搜索特征值算法:通过计算识别出离缝宽度方向的起、终点坐标,离缝深度方向的最高、最低点坐标,由此计算出离缝的宽度和深度。由于激光测量仪在测量离缝深度时能识别出的最大值为96 mm,因此离缝深度的测量主要用于辅助判断该条裂缝是否是离缝,从而实现离缝与裂纹、混凝土掉块的区分。软件系统中默认离缝深度≥20 mm 进行离缝宽度数据的采集和存储。离缝智能检测水平测量原理见图5。
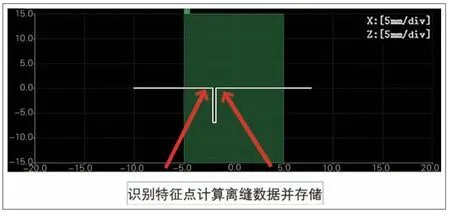
图5 离缝智能检测小车测量原理
离缝智能检测小车的人机交互界面见图6。检测开始前,点击“数据输入”按钮导入待测线路的轨道数据(轨道板编号及对应里程),点击“初始设置”按钮输入采集频率、离缝现场实时预警值、起始位置对应里程和轨道板编号等。检测过程中操作界面上可实时显示检测位置离缝的宽度和深度、检测位置对应的里程和轨道板编号、小车运行状态等。线上检测完成后点击“数据查询”按钮可实现检测数据的查询和下载,同时自动生成检测报表。
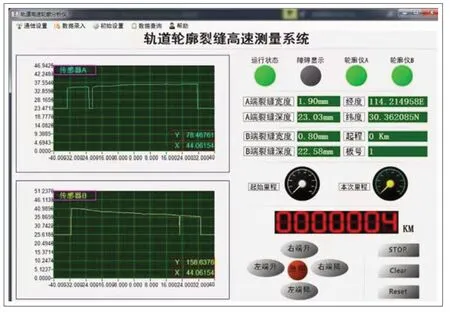
图6 离缝检测小车人机交互界面
5 室内及现场试验
为验证高速铁路无砟轨道离缝智能检测小车的检测精度及速度,分别进行了室内和现场试验。
5.1 室内试验
2019 年12 月10 日,利用室内搭建的CRTSⅡ型轨道板试验段对离缝智能检测小车的检测精度进行测试。试验现场共设置10 个离缝检测点,通过对比小车和人工检测结果,评价小车的检测精度。精度检测结果统计见表1,从表中可以看出,小车检测精度为±0.1 mm,满足检测小车研发要求,第三方校准证书见图7。
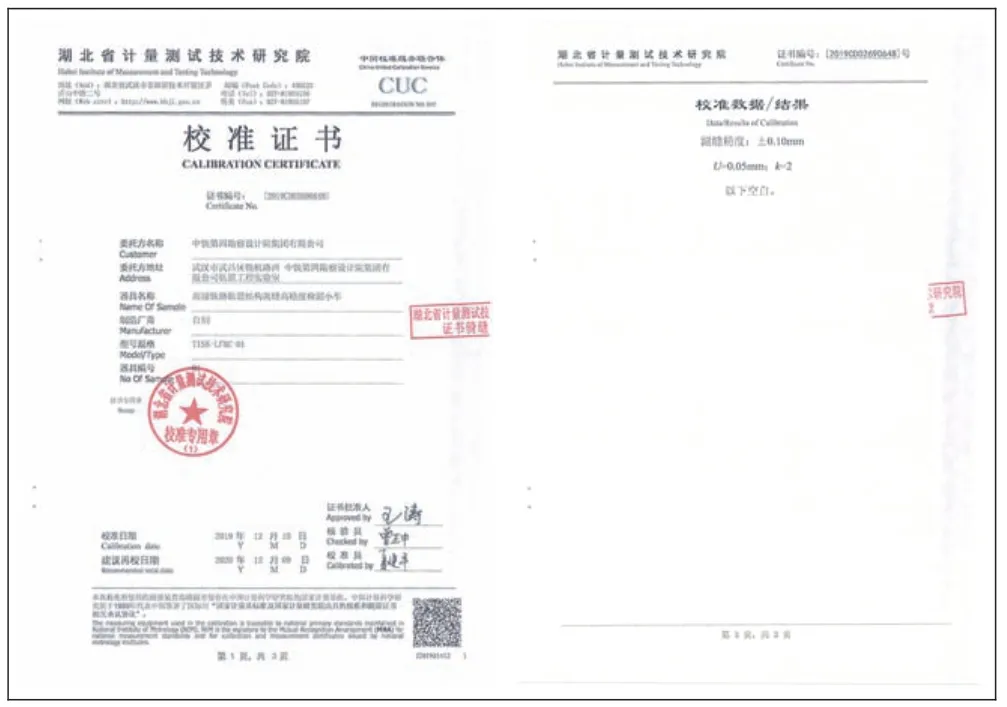
图7 第三方校准证书
5.2 现场试验
2019 年12 月14 日,在某高铁线路无砟轨道K1173—K1179 区段进行现场试验,在保证检测准确度(准确率≥90%)前提下,测试离缝智能检测小车在轨道上的推行速度。现场测试结果表明,桥梁地段小车推行速度为4.0 km/h、路基地段小车推行速度为5.5 km/h时,移动检测结果的准确度满足要求。现场校验离缝检测小车的测试结果(见图8)。

图8 现场校验离缝检测小车的测试结果
利用离缝智能检测小车对现场1 km 范围内的轨道板离缝宽度进行检测,轨道板离缝值统计分布见图9。
基于现场检测的轨道板离缝值统计,对轨道板服役状态进行评价:
(1)现场88%的轨道板服役状态良好;
(2)对于2 mm≤轨道板离缝值<3 mm 的轨道板(约占9%),在日常养护维修中要加强观测,密切注意轨道板离缝发展情况;
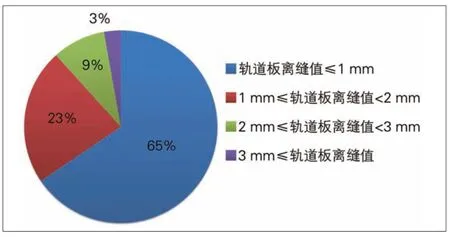
图9 轨道板离缝值统计分布
(3)对于轨道板离缝值≥3 mm的轨道板(约占3%,最大离缝值3.1 mm),可在设计规定温度范围内进行注浆修补。
6 结束语
针对CRTSⅡ型板式无砟轨道砂浆层离缝检测存在的普遍问题,提出基于激光扫描技术的非接触式识别方法,研制高速铁路无砟轨道离缝智能检测小车,实现了离缝宽度数据实时显示、侧向挡块自动避障、检测数据自动上传、检测报表自动生成等功能。
室内和现场检测结果表明,小车离缝值检测精度达到±0.1 mm,桥梁地段检测速度达到4.0 km/h,路基地段检测速度达到5.5 km/h,实现天窗时间离缝高效率、高精度的检测目标,可为铁路工务部门的日常检测工作提供可靠的技术保障。
