轻小型低空无人机航测航高计算方法研究
2020-09-29马小辉张艳超伍增强薛志强
马小辉 张艳超 伍增强 薛志强
(1、陕西彬长孟村矿业有限公司,陕西 咸阳713600 2、陕西天润科技股份有限公司,陕西 西安710054)
航空摄影测量从飞机飞行高度上可以分为高、中、低三种摄影测量方式,高空摄影测量主要采用运输机搭载航摄仪的方式进行,由于大型运输机限制较多,不利于成本控制,中低轻型飞行器价格的下降、无人航空器的发展等,使中低空航空摄影测量发展迅速[1-2]。中低空无人机航测主要采用固定翼或者旋翼无人机搭载航测相机的方式,具有机动灵活、高效快速、作业成本低、生产周期短等优点,迅速成为传统航测的有力补充[2]。近年来,轻小型低空无人机已广泛应用于地形图测绘[3]、库区范围划界[4]、公路测量[5]、农村土地经营承包权确权[6]、公路断面测量[7]、土方平衡[8]等多个方面。轻小型低空无人机得到广泛应用的同时,由于低空无人机体型小、载重小、相机性能较低等原因,容易造成测图成果质量差、精度低等问题。为了满足大比例尺成图的要求,使航测成果分辨率高、精度符合要求,测区飞行时应尽可能降低飞行高度,以此保证地面分辨率能够满足大比例尺成图的需要。但是在飞行高度过低时,能够满足精度要求,但造成飞行工作量大、数据量大、处理困难、效率低等问题。因此在实际项目中应根据成图需要,设置合适的飞行高度,才能在保证相片质量,并满足成图要求的情况下,减少飞行工作量、减少数据量、提高数据处理效率。该文介绍了成图比例尺、地面分辨率、飞行高度、相机参数之间的关系,提供一种无人机飞行高度计算方法,根据成图比例尺,计算最低飞行高度与最大飞行高度,保证成果满足要求。
1 基本理论
1.1 摄影基本原理
摄影主要是采用相机对目标景物进行保存,目前航测采用的主要是数码相机。数码相机由镜头、取景器、CCD、液晶显示屏、快门等组成,在航空摄影测量中一般使用定焦镜头,固定镜头的焦距。取景器用来取景,CCD 是电子成像元件,其面积大小决定像素的大小。数码相机采用凸透镜成像原理进行拍摄与成像,凸透镜成像原理中设计光心、焦点、焦平面、焦距、像距、物距等概念,如图1 所示。
图中,AB 表示拍摄的实物,A1B1 表示实物经过凸透镜都在相机中形成的倒立像,O 是凸透镜的光心,即凸透镜的中心,F是凸透镜的焦点,f 表示焦距,即物镜后主点至焦点之间的距离,F 表示像距,即像平面镜到像之间的距离,H 表示物距,即物体到像平面镜之间的距离。
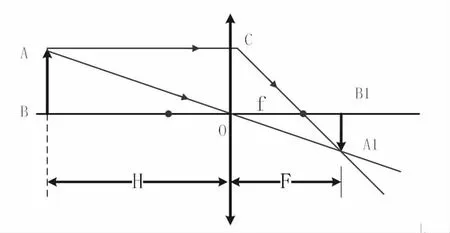
图1 凸透镜成像原理
根据上图采用相似三角形的方法可以推导出光学中最基本的高斯成像公式:

式中:f:相机焦距;
F:表示相机像距(主距);
H:表示物距。
根据上图中相似三角形可以得到:

式中:AB:表示物体大小;
A1B1:表示物像大小。
1.2 像片质量因素
像片的质量即像片的清晰度,主要由像片单位面积内的像素数目决定。像素是数码相机感光器件(CCD 或COMS)上的最小感光单位,像素数指一张相片的总的像素数目,如5472×3648 像片的像素数目约为2000 万,通常称为分辨率。像片的清晰度不仅取决于像素数的多少,更取决于单位面积上的像素数。一般相机感光器件的尺寸是一定的,如35mm 全画幅相机感应器尺寸为36mm×24mm、佳能APS-H 相机感应器尺寸为27.9mm×18.6mm,各类型号相机的感应器尺寸可在相机说明书中查找。相同感光器件的相机,分辨率越高(像素数目越多),图像清晰度越高,越细腻。
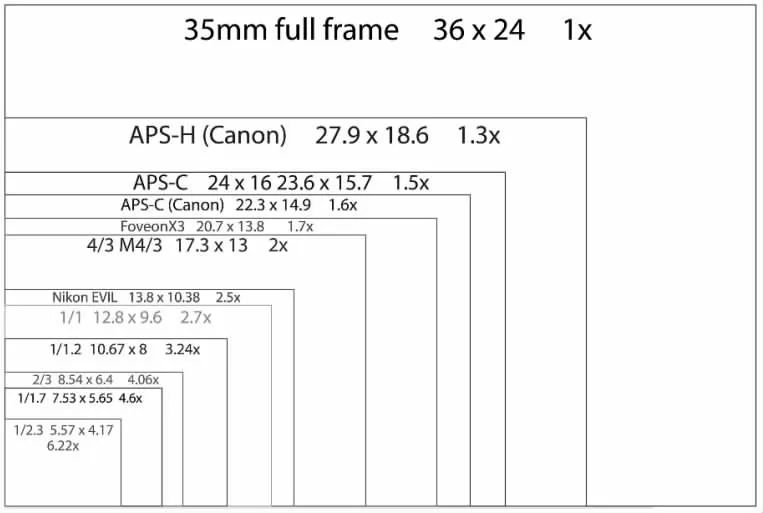
图2 部分相机感光器件尺寸

其中:a:单个像素尺寸;
L:感应器尺寸(边长);
N:影像像素数(单边)
大疆精灵4P 无人机携带相机型号为FC6310,该相机感光器尺寸为1 英寸(在相机行业1 英寸CMOS 的对角线长度为16mm,而不是25.4mm[9]),即12.8mm×9.6mm。该相机的像素数为5472×3648,因此每个像素的实际尺寸为2.34um。
1.3 航测基本原理
无人机航测系统主要由硬件系统和软件系统组成,硬件系统包括无人机飞行平台(飞行器、GPS、惯导、指南针、气压计等)、数码相机、地面控制系统;软件系统包括地面控制系统、传感器系统、飞行控制系统、以及数据后处理系统[2]。无人机航测采用无人机搭载数码相机进行空中拍摄、获取地面影像,然后采用空中三角测量的方式对像片进行加密计算,最后进行DOM、DSM、DEM、DLG 等数字产品的制作。
轻小型低空无人机由于自身载重小、惯性小、易受气流影响、俯仰角、翻滚角和旋片角变化快,在飞行过程中容易造成像片清晰度低、像片重叠度不均匀、航带排列不整齐等问题。因此,在飞行时尽可能选择合适的飞行高度,适当增加重叠度,以提高像片的地面分辨率,进而满足数字产品的成图比例尺。在无人机飞行时飞行高度越低地面分辨率越高,地面分辨率越高,图像越清晰,测量精度越高[2],无人机航测飞行高度与影像地面分辨率关系如公式(4)所示。在实际低空无人机航测项目中,由于飞行时间、飞行成本、数据处理效率等方面因素影响,不可能无限制的降低飞行高度,提高影像地面分辨率。需要综合考虑成本和效益,在满足成图比例尺要求,尽可能高的进行航空测量,如此缩短飞行时间、减少数据量、提高数据处理效率,进而降低项目生产成本。

F:数码相机主距;
H:无人机飞行相对高度;
a:像片像素尺寸;
GSD:影像地面分辨率。
2 相对航高计算
在低空无人机航测时,由于无人机飞行航高与航测相机主距和焦距之间数值相差较大,相差多个数量级,因此由公式(1)可以认为航测相机主距与焦距相同,即

由公式(3)、(4)、(5)合并整理得:
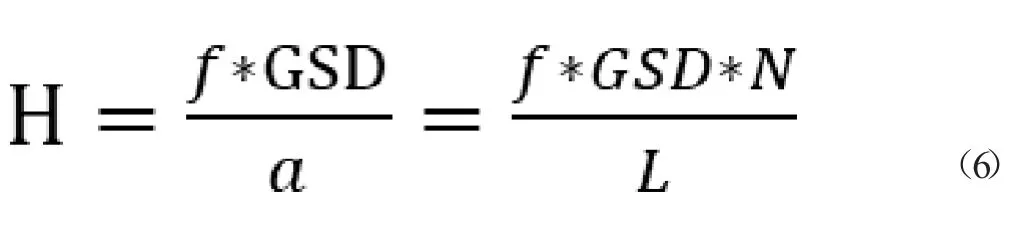
式中:f:表示航测相机焦距;
GSD:表示影响地面分辨率;
N:表示影像像素数(长边或短边);
L:表示相机感光器件尺寸(长边或短边)。
航空摄影分为传统的高空航空摄影和无人机低空航空摄影,本文主要探讨轻小型低空无人机航测过程中相对航高的计算。低空无人机航测的成图比例尺主要为大比例尺,包括1:200、1:500、1:1000 等大比例尺地形图,根据相关规范要求[9-11],低空无人机航测地面精度要求如表1 所示,以大疆精灵4P 无人机、SONY(型号:ZRZK-X1)为例,相对不同比例尺飞行航高对应如表1 所示。

表1 数码相机航测成图比例尺无地面分辨率关系
3 测区实验
3.1 概况与技术方案
本实验测区位于西安市神州大道与京东大道交口,地表主要覆盖物为城中村拆迁建筑垃圾,测区面积约为335 亩。采用无人机航飞,地面布设像控点,航飞完成后进行空三计算,三维模型构建,采用RTK 实测点与三维模型采集点进行对比的方案进行精度验证,证明该飞行高度是否满足相应比例尺测图要求,技术流程如图3 所示。
本次实验要求成图比例尺为1:500,地面分辨率为8-10cm,航测飞机采用大疆精灵4P,相机为FC6310,焦距为9mm,感光器尺寸为12.8mm×9.6mm,像素数为5472×3648,根据公式(6)计算可得飞行高度最高为190m,为保证测图质量本次分型高度为110m,成图地面分辨率理论约为3cm。
3.2 成果检测
本次实验在测区内提取若干个数据点进行精度验证,实验点均匀分布在测区内,结果对比如表2 所示,通过模型采集坐标与实测坐标进行对比分析,得到采集坐标与实测坐标误差均在3cm 左右,说明设计航高与计算地面分辨率基本吻合。
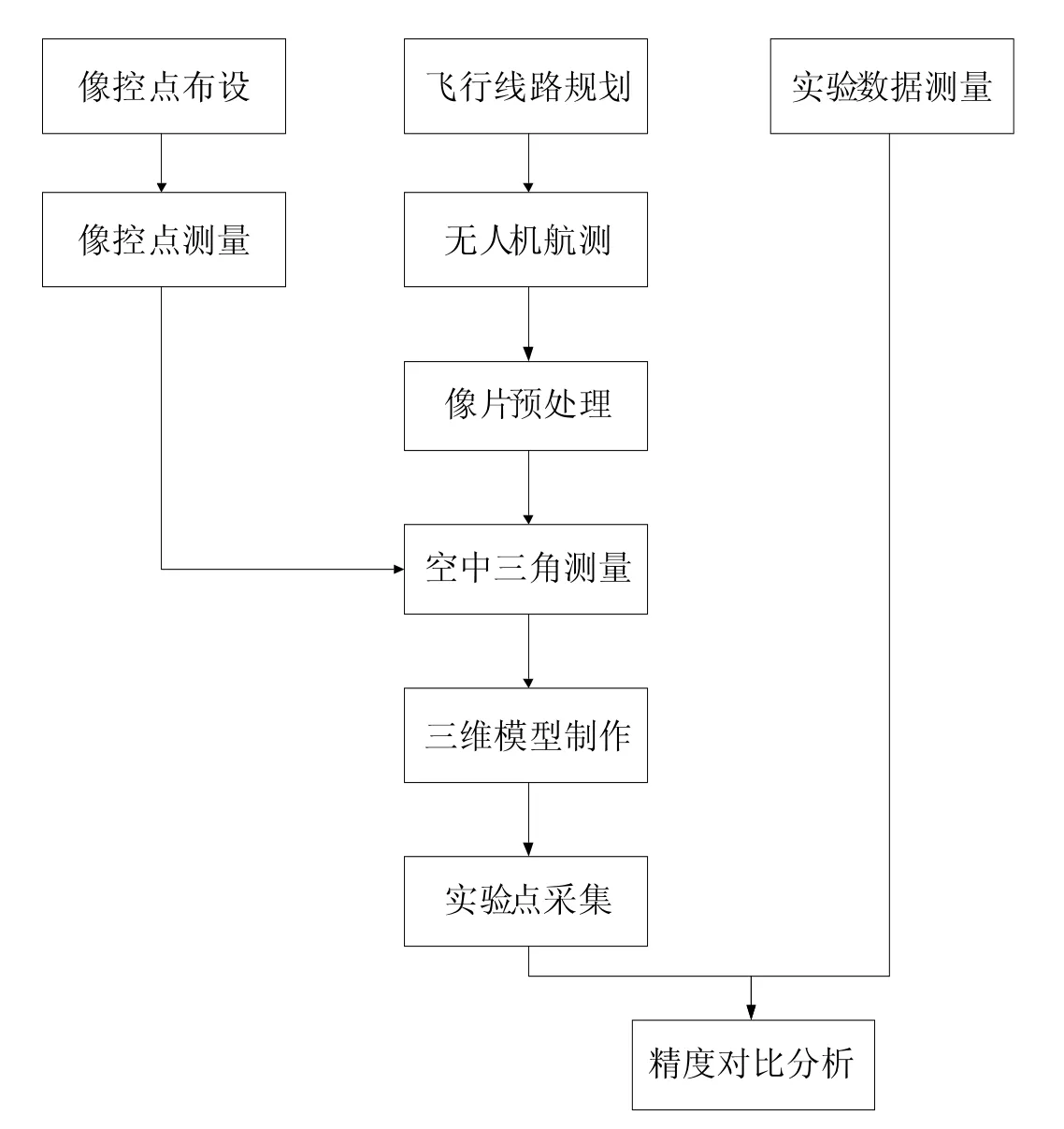
图3 实验技术路线图
图4 基于测区三维模型进行数据采集
结束语
通过对相机原理、凸透镜成像原理、航测过程、地面分辨率等进行综合分析,确定无人机飞行时航高的计算方法,解决了实际航飞过程中,无人机飞行高度控制的问题。当无人机飞行较低时,拍摄像片的分辨率越高、清晰度越高、地面分辨率越高,同时内业处理的数据量越大、处理越复杂、越耗时;当飞行高度过高时,影像的清晰度下降、地面分辨率低,无法满足任务需求以及成图所需的地面分辨率。在实际项目中要根据任务目的、成图比例尺等,查找规范获取所需航测的地面分辨率,然后根据地面分辨率计算航飞高度,最后根据实际情况确定合适的飞行高度,完成任务需求。
