基于物联网的无人机输电线路巡检系统
2020-09-29张嘉烽张正华
沈 逸,张嘉烽,龚 正,张正华*
(1.扬州苏水科技有限公司,江苏 扬州 225000;2.扬州大学 信息工程学院,江苏 扬州 225127;3.国网江苏省电力有限公司 扬州供电公司,江苏 扬州 225009)
0 引言
随着输配电技术的迅速发展,输配电基建的日益普及,越来越多的高压输电线路故障问题也变得更加棘手,如绝缘子击穿、电路老化、雷击穿和垃圾缠绕等等[1],由于输电线路输送距离长、塔架高并可能穿越大量自然条件复杂多变的深山大河,甚至是无人区,当出现故障时,目前常见是大量采用人工地面观察或登杆(塔)排查等传统手段检查输电线路运行状态[2],这不仅受自然条件制约,而且劳动强度大,人身安全存在隐患,成本高,巡检效率低,巡检质量难以保证以适应当前大电网安全生产的要求。
目前,国内外投入运营的输电线路巡检系统并不多。文献[3]中讨论了垂直起降无人机在电力设备巡检中的应用,分析了近年来该课题的研究进展情况。文献[4]讨论了巡检中的诸多关键技术问题,展示出输电线巡检系统良好的发展前景。文献[5]介绍了一种检测输电线路的图像监测与检测系统,将直升机作为巡检载体沿输电线路飞行,拍摄其高清图像,然后进行离线处理并诊断可能出现的线路故障。文献[6]介绍了电力无人巡检系统的关键部分飞行控制器,种类繁多,应用广泛。文献[7]中有不少国外爱好者发起无人载具控制器开源项目,例如PIXHAWK、APM、CC3D、MutilWii等,这些开源无人载具控制器都可以控制包括多旋翼飞行器在内的多种无人载具。
针对以上研究不足,设计了一种以无人多旋翼飞行器为巡检载体、地面监控设备为支撑的输电线路巡检系统。这种巡线模式比起上述人工检测方法,具有低成本、低风险、高可靠、高效率和高灵活的优势,同时,其运用航拍影像的图像处理与识别技术[8],为输电线路缺陷故障的快速智能诊断提供了理论支持。通过高清视频无线传输技术[9],在电力综合探伤系统中实现数据链[10]的效果。在探测过程中采用一种可靠电力巡线地面站支撑系统,并实现电力巡线地面站支撑系统与多旋翼飞行器系统之间的通信。通过实验验证,该巡线系统具有较高的实时性和准确性。
1 多旋翼飞行器原理及结构设计
为了实现这种以多旋翼无人飞行器为载体的输电线路巡检模式,关键问题就在于多旋翼无人飞行器和无线传输通信手段的研究。此无人机巡检系统示意如图1所示。

图1 多旋翼无人飞行器巡检系统示意
1.1 飞行原理
多旋翼飞行器是一种结构简单、控制上也容易分析的飞行器。多旋翼飞行器通过多个旋翼的正反桨以及不同的转向与转速,形成由多个与机体垂直的升力和多个反扭力合成的动力面。通过改变这些力的大小与方向,动力面便具有全角度牵引机体的能力。但因为飞行状态是不稳定的,因此为了控制每一个电机的输出量便需要一套飞行控制系统进行实时调整。控制系统按照一定频率对飞行器姿态检测,根据测量结果计算出控制量,最终根据需求调整多个电机工作状态,即可改变飞机的动力面。多旋翼飞行器动力示意如图2所示。

图2 多旋翼飞行器动力示意
1.2 结构设计
多旋翼飞行器的结构设计核心部分为中心板,中心板部分需要兼顾锁紧机臂,提供动力电池的固定点,安装无人机飞控模块,安装更多的拓展模块等功能。本设计中采用的多旋翼主体结构固定方式为上下2层碳纤维板配合铝合金螺柱用以夹紧6条机臂,3条中心板的对角线上设计了6对高强度工程塑料的锁定管夹,用于固定多旋翼无人飞行器的6条支臂模块。机架渲染示意如图3所示。
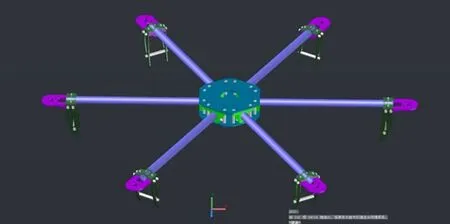
图3 机架渲染示意
多旋翼飞行器结构设计是一个非常重要的部分,具有以下特点:① 大量采用碳纤维板与碳纤维管,强度大,韧性好;② 采用模块化设计,更换零件容易,方便维修;③ 机身可折叠,关节部分可以自锁,结构稳定牢固。
2 系统设计
本多旋翼无人飞行器巡检系统主要分为多旋翼无人飞行器、视频拍摄传输模块和地面基站3部分。多旋翼无人飞行器的设计部分已经在上节介绍了,本节主要介绍视频拍摄传输模块和地面基站部分。
2.1 视频拍摄传输模块
在多旋翼飞行器电力寻线的工作过程中,需要一个清晰度高、抗干扰强的轻量化无线视频传输系统。根据上述需求,设计了一种符合需求的HD高清视频无线传输系统。该系统采用了一种基于Linux的嵌入式操作系统[11],通过数字高清摄像头进行视频捕捉,并使用2.4 GHz无线网桥将视频信号传回地面,从而实现HD高清视频的无线传输。
网桥[12]是整个系统的重中之重,只有选择合适的网桥,高清视频流才能快速而又准确无误地传回地面站。经过慎重考虑与分析,采用UBNT网桥[13],该网桥是Ubiquiti Networks公司在全球范围内设计、制造和销售创新性的宽带无线解决方案,具有颠覆意义的无线产品。该网桥的优势在于任何一个型号的UBNT产品,均可被作为无线覆盖AP、点对点网桥、点对多点网桥和无线客户端(CPE)等多种角色。
2.2 地面基站
电力巡线地面站支撑系统的核心是系统的计算机平台,根据要求,采用了一种基于Intel最新款低功耗处理器的操作系统,该系统采用Windows、Linux双支持的平板电脑作为计算机平台[14],具有低功耗、操作简单、易于上手的特点。与此同时,在地面站支撑系统中安装了一个14英寸LED液晶屏辅助显示,具有低功耗、高对比度等特点,增大了显示面积,以便于巡线图像的实时观察。
在地面基站控制系统中,可以根据无人飞行器传输回的图像能够较为精确地找到巡线的初始位置,并实现对无人飞行器的控制。手动控制系统是嵌入式的无线电发射机控制装置,配备了128 pixel×64 pixel分辨率的彩色液晶显示屏,2个2轴的万向遥杆,3个可变旋钮,6个2位开关,1个3位开关和一些微调按钮。硬件系统的工作流程如图4所示。

图4 地面基站控制系统工作流程
2.3 整体系统结构设计
整体的硬件系统结构如图5所示。

图5 硬件系统结构
整个硬件系统结构主要包含了多旋翼无人飞行器组件[15]、核心控制单片机、HD高清视频模块、无线网桥和地面基站,采用模块化、分层隔离的设计思想,从而确保了系统的运行效率和准确率。
3 实验验证
3.1 实验准备
样机装配如图6所示。

图6 样机装配
在机架的选择上,采用了碳管为机架的主体。由于碳管具有优异的电学性能,场发射性能以及独特的结构等特点使得碳管更能够有效抗强电磁干扰。碳管对电磁波的屏蔽主要原因是碳管对电磁波具有较强的吸收作用。数据链无线通信系统采用了跳频技术,其本质上是一种利用载波跳变实现频谱展宽的扩频技术,可以有效地避开干扰。跳频示波器演示如图7所示。

图7 跳频示波器演示
实验开始之前还需要校准PID、手动遥控设备、加速度计和罗盘等,校准示意如图8所示。

图8 飞行器校准示意
3.2 实验结果分析
Mission Planner操作界面如图9所示。多旋翼无人飞行器在试飞过程中向地面基站传回了实时视频画面,并且画面清晰,地面基站得到实时巡线视频以后可以对视频进行后续的处理工作,对于及时并且准确发现高压输电线路故障问题具有很重要的意义。在地面基站,操作人员可以通过Mission Planner操作界面实时操控无人飞行器,实现无人机实时巡检高压输电线的工作效果。

图9 Mission Planner操作界面
高压线路演示如图10所示。识别电力线演示DEMO,可以手动将多旋翼飞行至电力线路周围,采集图像后通过霍夫变换,将所拍到的图像转换为灰度图像,通过软件计算识别出目标电力线,去除无意义的图像,帮助巡线人员更准确地判断高压输电线路的损坏类型以及损坏程度。

图10 高压线路演示
4 结束语
多旋翼无人飞行器巡线系统结合了物联网技术,在Linux嵌入式操作系统下通过摄像头进行视频捕捉,并通过网桥将信号实时传回地面。实验演示结果表明,该系统具有较强的实时性和很高的准确率,实现了以较低的成本完成高清视频的传输,有助于及时发现高压输电线路故障,帮助巡线人员更准确地判断高压输电线路的损坏类型以及损坏程度,对于解决高压输电线路检修难这一问题具有前瞻性意义。
