智能交通环境下车辆群体速度优化控制方法研究
2020-09-28吕少文杨立越金南旭郑春花
吕少文 杨立越 金南旭 郑春花
1(汉阳大学机械设计工程系 安山 15588)
2(中国科学院深圳先进技术研究院集成所 深圳 518055)
1 引 言
目前,能源消耗问题日益凸显,降低车辆的能量消耗已经成为科学研究的热点之一。随着智能交通技术的不断完善,车与车及车与交通设施之间均可实现实时通信,不同车辆的车速和位置都能实时获取[1-3]。这使得智能网联汽车能够根据当前的交通状况主动调整速度,因此运行效率得到显著提高[4-7]。
一些学者基于智能交通系统对车辆的速度进行了优化。Kamal 等[8]根据道路地形、车辆动力学模型和燃料消耗特性信息,采用模型预测控制(Model Predictive Control,MPC)的方法,对一辆传统燃油车的经济速度进行了控制。Mahler 等[9]开发了一种最佳预测性的速度规划算法,该算法根据交通信号灯配时(Signal Phase and Timing,SPAT)信息来降低车辆的能耗。Kamal 等[10]考虑了车辆动力学模型以及 SPAT 信息,采用 MPC 算法对一辆传统燃油车的速度进行优化控制。但是,这些早期研究都是仅对一辆车的速度进行优化控制。针对多车的交通场景,已有一些研究采用优化类算法对多辆车的车速进行了控制。例如,在城市道路环境中,HomChaudhuri 等[11]提出了一种基于快速 MPC 的策略,提高了一组智能网联汽车的燃油经济性。HomChaudhuri 等[12]和钱立军等[13]为了提高车辆队列的燃油效率,利用 MPC 优化了智能网联混合动力汽车队列的车速。当交通畅通无阻时,该方法对车辆队列的速度优化效果较好;但当车辆队列中车辆数量较多或整个交通相对拥挤时,车辆队列的速度优化会受到严重影响。
为了反映车辆的能量消耗,本研究需要准确的能量消耗模型。在多辆车交通场景的研究中,已有研究者[14-16]采用了由经验获取的关系式作为能量消耗的模型。Li 等[17]、Wu 等[18]和 He 等[19]根据牵引力方程建立了能量消耗模型,但这些能量消耗模型均不够具体,不能充分模拟实际的能耗值。在多辆车场景中,为避免车辆之间发生碰撞,需要考虑车辆间的跟车行为[20]。然而,考虑车辆间的跟车行为,将会使控制方法变得更加复杂。因此,如何在考虑跟车行为的同时,降低控制方法的复杂程度,仍是需要探索的问题。
本研究针对多车交通场景提出一种基于智能交通系统的车辆速度优化控制方法。具体地,根据 SPAT 信息以及车辆的能量消耗模型,以降低所有的能量消耗为目标,采用瞬时优化的方法,对每一辆车的速度进行优化控制。本文的贡献是:①充分利用 SPAT 信息对每一辆车进行速度优化,防止车辆在信号灯前停止,更有利于节能,且是实时优化的,因此计算快、实时性好;②本文方法是依据完整的电动车动力学模型建立的能量消耗模型,而不是通常用经验获取的数学关系式;③通过搭建联合仿真平台,简化了控制方法,因为联合仿真平台自带的跟车模型可以自动控制车辆间的安全距离。此外,为验证本文方法的有效性,将本文方法与 3 个基准方法进行了比较。结果显示,相比于基准方法 1、基准方法 2 和基准方法 3,本文方法的能量消耗分别降低了 14.32%、9.74%、73.72%,表明其在节能方面的有效性。
2 车辆能耗模型
车辆能耗模型能描述车辆行驶与车辆能源的消耗关系,本研究使用 Autonomie 软件的车辆性能分析模型。Autonomie 是由美国阿贡国家实验室开发的一款商业车辆性能分析软件,所建立的车辆模型具有较高可信度。本研究选取的车辆是纯电动车,Autonomie 模型如图 1 所示,模型中能量流动如图 2 所示。
由于电器附件的能量消耗与车速关系不大,所以本研究所建立的能量消耗模型未将其考虑在内。当车辆需要加速时,电池提供的能量通过电机和传动装置传递给车轮;当车辆需要制动时,部分制动力矩通过车轮和传动装置传递给电机,通过电机的发电机模式发电,进而给电池充电。
2.1 车辆需求功率模型
车辆在行驶过程中所需的牵引力如公式(1)所示:
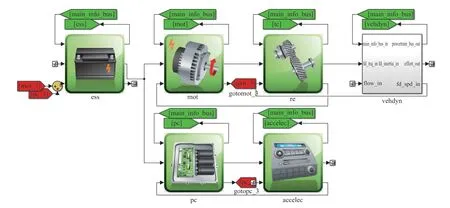
图1 电动车模型Fig. 1 Electric vehicle model
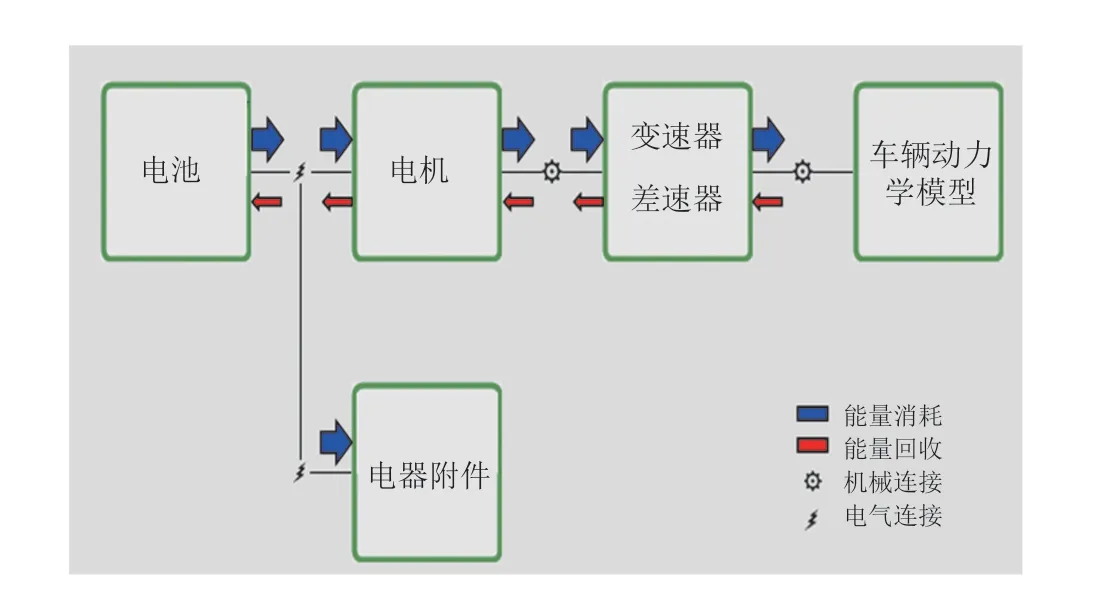
图2 能量流动示意图Fig. 2 Schematic diagram of energy flows in an electric vehicle

其中,Fi为车辆的牵引力;i为车辆编号;ai为车辆的加速度; 为滚动阻力系数,该系数与车速之间的关系如图 3 所示。本研究中相关的整车基本参数如表 1 所示。
2.2 电机模型
电动车行驶过程中电机需要输出的转矩如公式(2)~(4)所示:

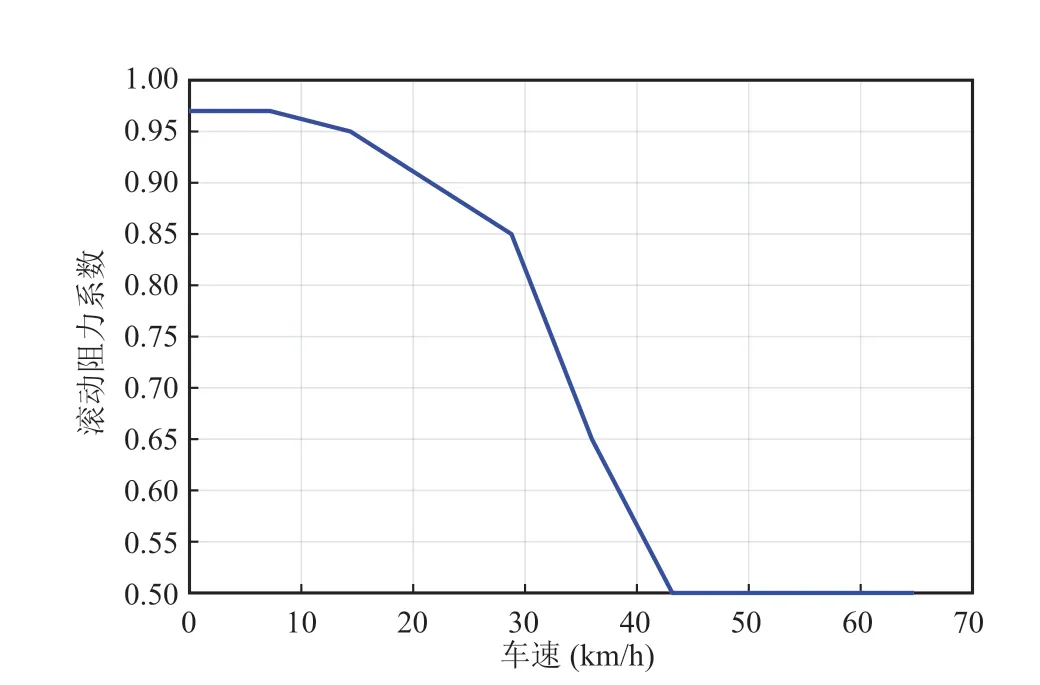
图3 滚动阻力系数Fig. 3 Rolling resistance coefficient
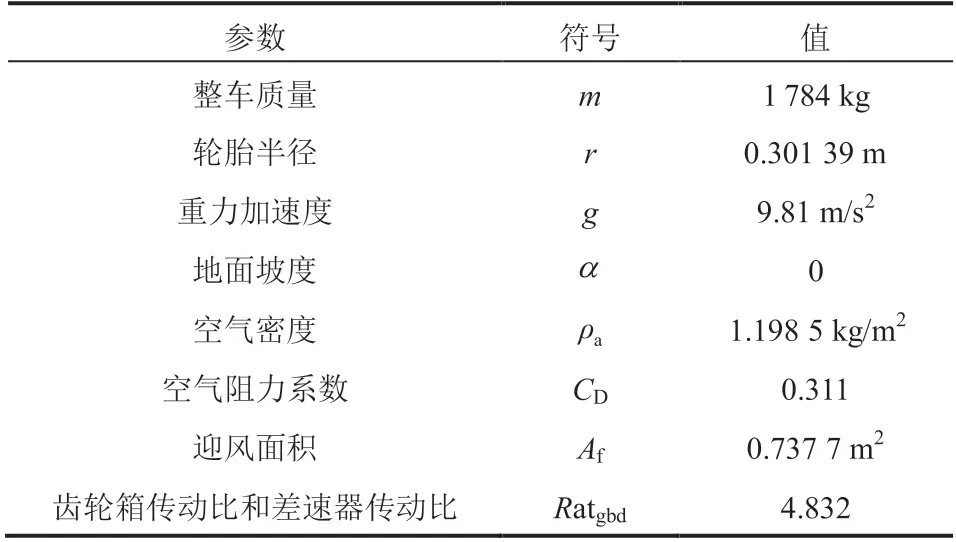
表1 整车基本参数Table 1 Parameters of the vehicle
由公式(4)和(3)可获取电机的输出功率,如公式(5)所示:
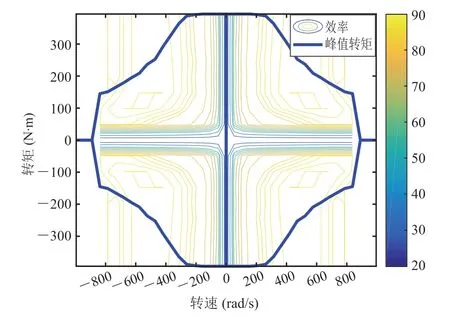
图4 电机效率Fig. 4 Efficiency map of the motor
2.3 电池模型
电池等效电路模型(Equivalent Circuit Model,ECM)具有结构简化、参数集中、易于识别、物理含义清晰等优点,因此被广泛用于电池荷电状态(SOC)估计[21]。ECM 的结构有多种形式,因此选择合适的模型结构和准确的模型参数非常重要[22]。本文采用二阶 RC 等效电路模型(图 5)来模拟电池的工作特性。与其他电池等效电路模型相比,二阶 RC 等效电路模型具有更高的准确性[23]。
由于本文研究的是纯电动车,电池 SOC 的计算模型可视为电动车的能量消耗模型。电池 SOC 的计算如公式(6)~(12)所示:

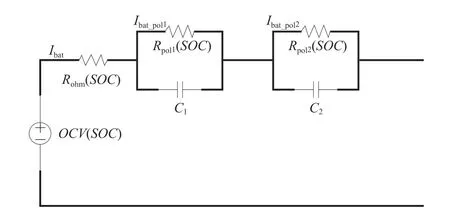
图5 二阶 RC 等效电路模型Fig. 5 Second order equivalent circuit diagram of the battery model
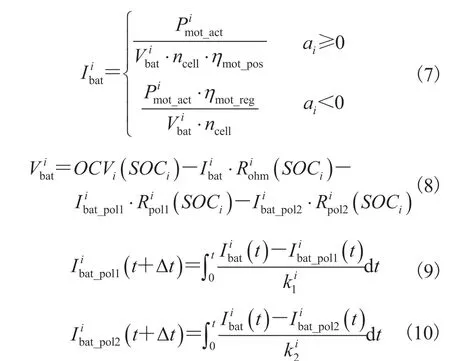
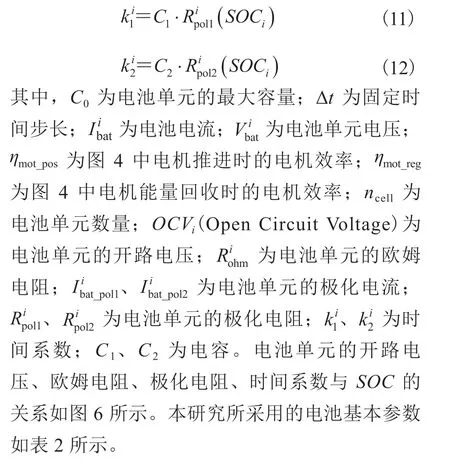
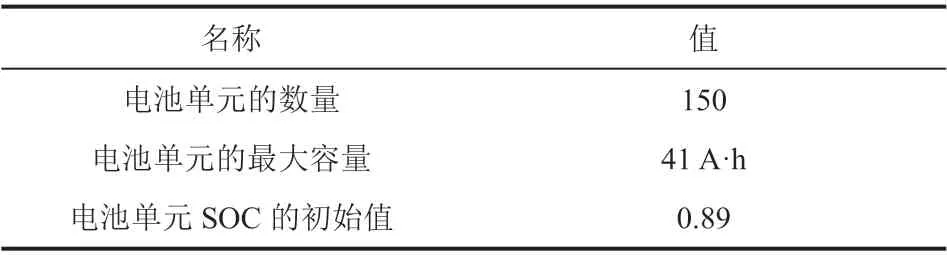
表2 电池的基本参数Table 2 Parameters of the battery
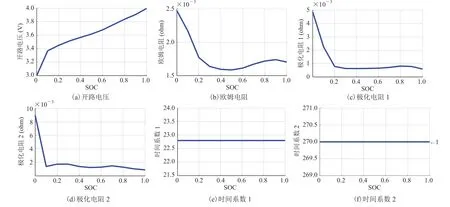
图6 电池单元的不同变量与 SOC 之间的关系Fig. 6 Relationship between different variables of battery cell and SOC
3 基于智能交通的车辆群体速度优化控制方法设计
本研究所提出的基于智能交通的车辆群体速度优化控制方法以车辆能量消耗模型为依据,综合考虑其他车辆及 SPAT 对车速的影响,通过瞬时优化算法实时确定车辆的经济车速。当行驶中的车辆遇到红色信号灯时,需要减速甚至停车,车辆的频繁启停会产生额外能量消耗。从 Vissim 软件中可以实时读取车辆的速度、车辆与信号灯等之间的距离以及 SPAT 信息,故可计算出目标速度区间。当车辆速度维持在速度区间内时,可以减少车辆停在信号灯前的次数。但在目标速度区间中,经济车速的确认需要进一步探讨。本研究根据 Autonomie 提供的具体车辆性能模型信息,计算 SOC 的变化量,进而从目标速度区间中确定经济车速,该过程有利于降低车辆群体能量消耗。另外,由于本研究考虑的是多辆车交通场景,所以本文方法需要考虑跟车行为来避免车辆间发生碰撞。图 7 为基于智能交通的车辆群体速度优化控制方法示意图。
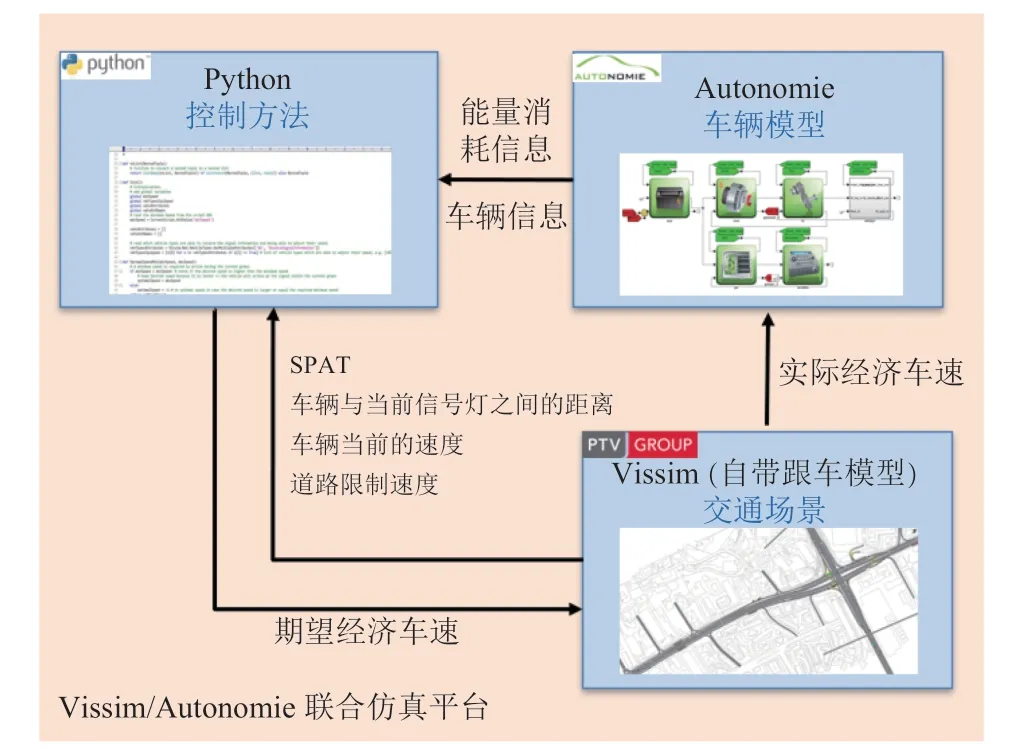
图7 基于智能交通的车辆速度优化控制方法示意图Fig. 7 Schematic diagram of the speed optimization method based on intelligent transportation system
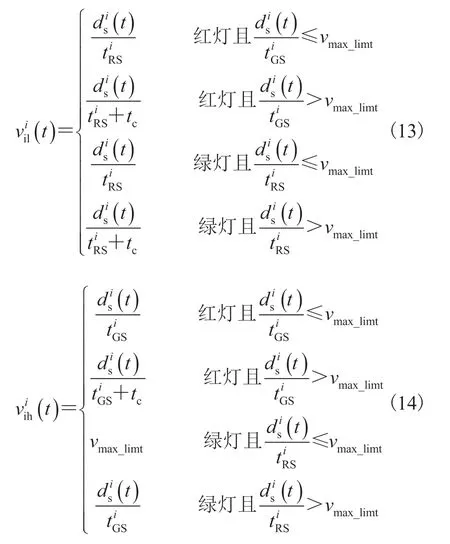
3.1 使用 SPAT 信息计算目标速度区间

3.2 从目标速度区间中选择经济车速
对于本文研究所采用的电动车,当电动车 SOC 保持一个较高的状态时,意味着电动车的能量消耗较低。利用电动车能量消耗模型(公式(6)),从实时目标速度区间中选择实时经济车速,使电动车实时 SOC 保持最高状态。以l为速度步长,对实时的目标速度区间进行划分:

根据能量消耗模型可以发现,在已知车辆当前行驶速度时,车辆下一时刻选择不同的车速,对应的能量消耗也是不同的。经济车速由公式(16)计算:
3.3 跟车模型
Vissim 是一种微观的、基于时间间隔和驾驶行为的仿真建模工具,通常用于城市交通和公共交通运行建模[24]。在研究多辆车仿真场景时,姚佼等[25]和姚荣涵等[26]等利用 Vissim 软件自带的 Wiedemann74 跟车模型来控制跟车行为,避免车辆间发生碰撞。本研究自行搭建了 Vissim/Autonomie 联合仿真平台,利用 Vissim 软件自带的 Wiedemann74 跟车模型自动控制车辆间的安全距离,反映车辆间的相互影响,直接降低了研究的工作量[27]。另外,该联合仿真平台既可以考虑多辆车的智能交通场景,又可以建立完整的车辆动力学模型。
其中,d为安全距离;ax为停车时的平均车辆间距(取 2.0 m);z为随机因子(取[0,1],平均值为 0.5、标准差为 0.15 的正态分布);bxadd为安全距离附加部分(取 2.0);bxmult为安全距离倍数部分(取 3.0)。
4 仿真验证与分析
本研究搭建了 Vissim/Autonomie 联合仿真平台,并在该仿真平台上将所提出的方法与 3 个基准方法进行比较,由此验证其有效性。
4.1 交通场景模型
利用 Vissim 软件中的 COM(Component Object Model)功能,可以实现车与车通信以及车与交通设施的通信,实现交通场景智能化。本研究所采用的交通场景如图 8 所示,共包括 5 辆车、4 个十字路口和 4 组信号灯。实验中,车辆依次驶入路网,并始终在单车道上行驶,最终穿过 4 个十字路口,依次驶离路网[28-29]。这里假设车辆不转弯,所有车辆的行驶轨迹与图 8 中的红色路线保持一致,每辆车的总行驶距离都等于红色路线长度[30]。其中,5 辆车依次进入路网的时间如表 3 所示。根据已有报道[12,14-15]对交通场景的描述,本研究所搭建的交通场景具体参数如表 3 所示。
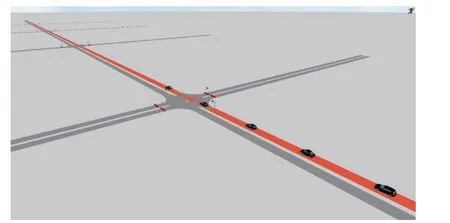
图8 交通场景Fig. 8 Traffic scene
4.2 仿真结果与分析

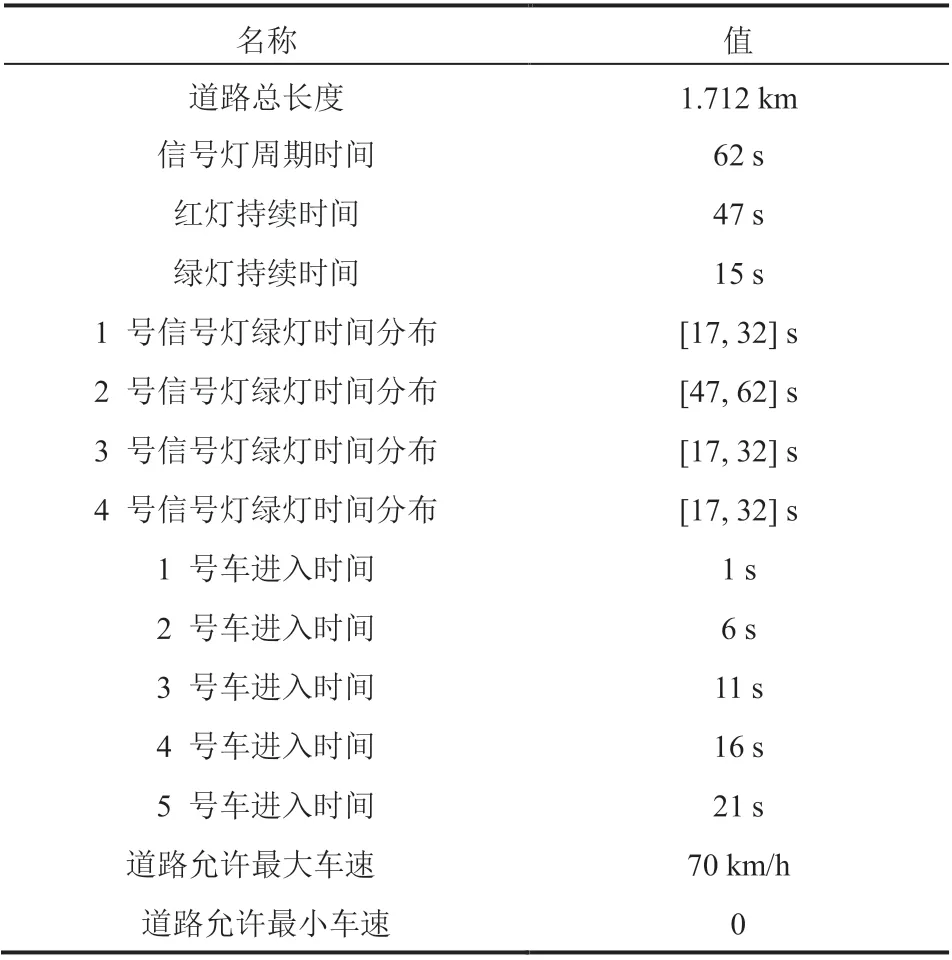
表3 交通场景具体参数Table 3 Specific parameters of the traffic scene
结合图 9(a)、(b)、(c)可以看出,车辆停车的次数基本为 0。这是由于基准方法 1、2 和本文方法都考虑 SPAT,车辆遇到红色信号灯时会提前控制车速,减少车辆停在信号灯前的次数。从图 9(d)可以看出,在基准方法 3 的控制下,每辆车都存在停车现象。这是由于基准方法 3 未考虑 SPAT,只利用 Wiedeman74 跟车模型控制车速,当车辆遇到红色信号灯时,需要停车。另外,从图 9 可以看出,1、2 号车的速度轨迹与 3、4、5 号车的速度轨迹有较大区别。这主要是因为信号灯的影响:①1、2 号车在经过第一个信号灯时,车辆可以调整车速顺利通过当前信号灯周期的绿色信号灯;②3、4、5 号车在经过第一个信号灯时,由于信号灯时间关系,即使车辆调整车速也无法顺利通过当前信号灯周期的绿色信号灯,因此只能调整车速顺利通过下一个信号灯周期的绿色信号灯。这导致了 1、2 号车的速度轨迹与 3、4、5 号车的速度轨迹有较大区别。在不同控制方法中,5 辆车的时间-位置关系如图 10 所示。从图 10(d)可以看出,基准方法 3 中的 5 辆车在信号灯前有多次停车现象,这是由于基准方法 3 未考虑 SPAT。而图 10(a)、(b)、(c)中的车辆基本没有出现在信号灯前停车的现象,这是由于本文方法、基准方法 1、2 都考虑了 SPAT。
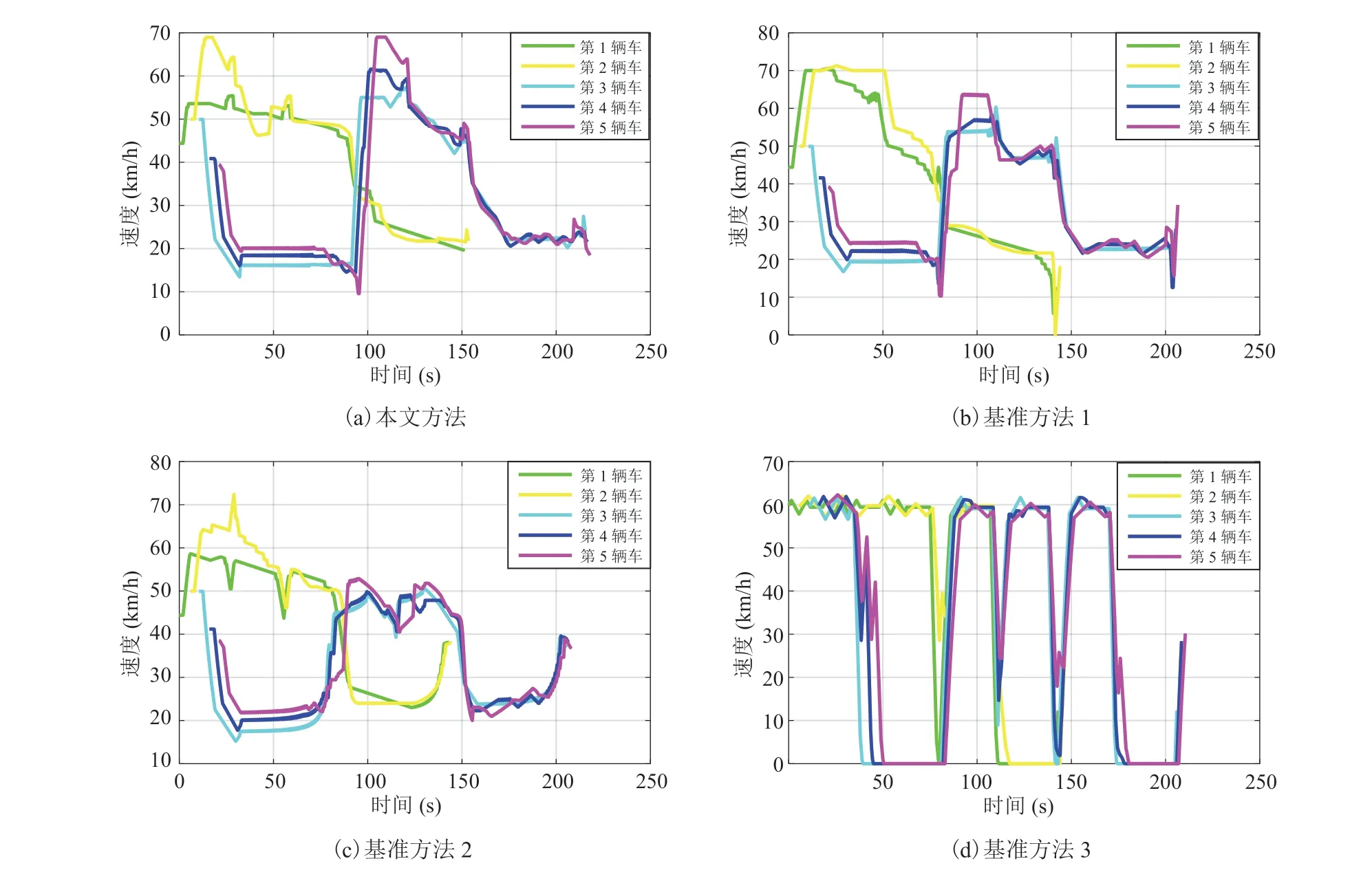
图9 不同控制方法中 5 辆车的速度轨迹Fig. 9 Speed trajectories for different methods
在不同控制方法的控制下,5 辆车的 SOC 轨迹如图 11 所示。可以看出,本文方法中每辆车的电池 SOC 都是最高的,这意味着本文方法的能量消耗最少。基准方法 3 中每辆车电池 SOC 都是最低的,这意味着基准方法 3 的能量消耗最多。基准方法 1 和基准方法 2 的电池 SOC 高于基准方法 3,这是由于前两种方法都考虑了 SPAT,从而降低了车辆停车次数,避免车辆频繁的加减速,因此降低了车辆的能量消耗。基准方法 1 和基准方法 2 的电池 SOC 低于本文方法,这是由于本文方法不但考虑了 SPAT,而且根据车辆能量消耗模型确定了经济车速,进一步降低了车辆的能量消耗。
在仿真结束时,不同的控制方法对应的每辆车电池 SOC 情况如表 4 所示,每种控制方法的仿真结果如表 5 所示。可以看出,相比于基准方法 1、2 和 3,本文方法的能量消耗依次降低 14.32%、9.74%、73.72%。这是由于本文方法不但考虑了 SPAT 信息计算速度区间,而且考虑了能量消耗模型,选择经济车速来降低车辆的能量消耗。这表明本文方法在降低能耗方面的有效性。同时,本文方法、基准方法 1、2 的停车时长远小于基准方法 3,这是由于基准方法 3 未考虑 SPAT。这也表明考虑 SPAT 有利于降低车辆停车时长。另外,从“行驶时间均值”可以看出,本文方法所控制的车辆需要用更长的时间通过整个交通路网。这是由于本文方法只考虑了能耗,并没有考虑时间成本。
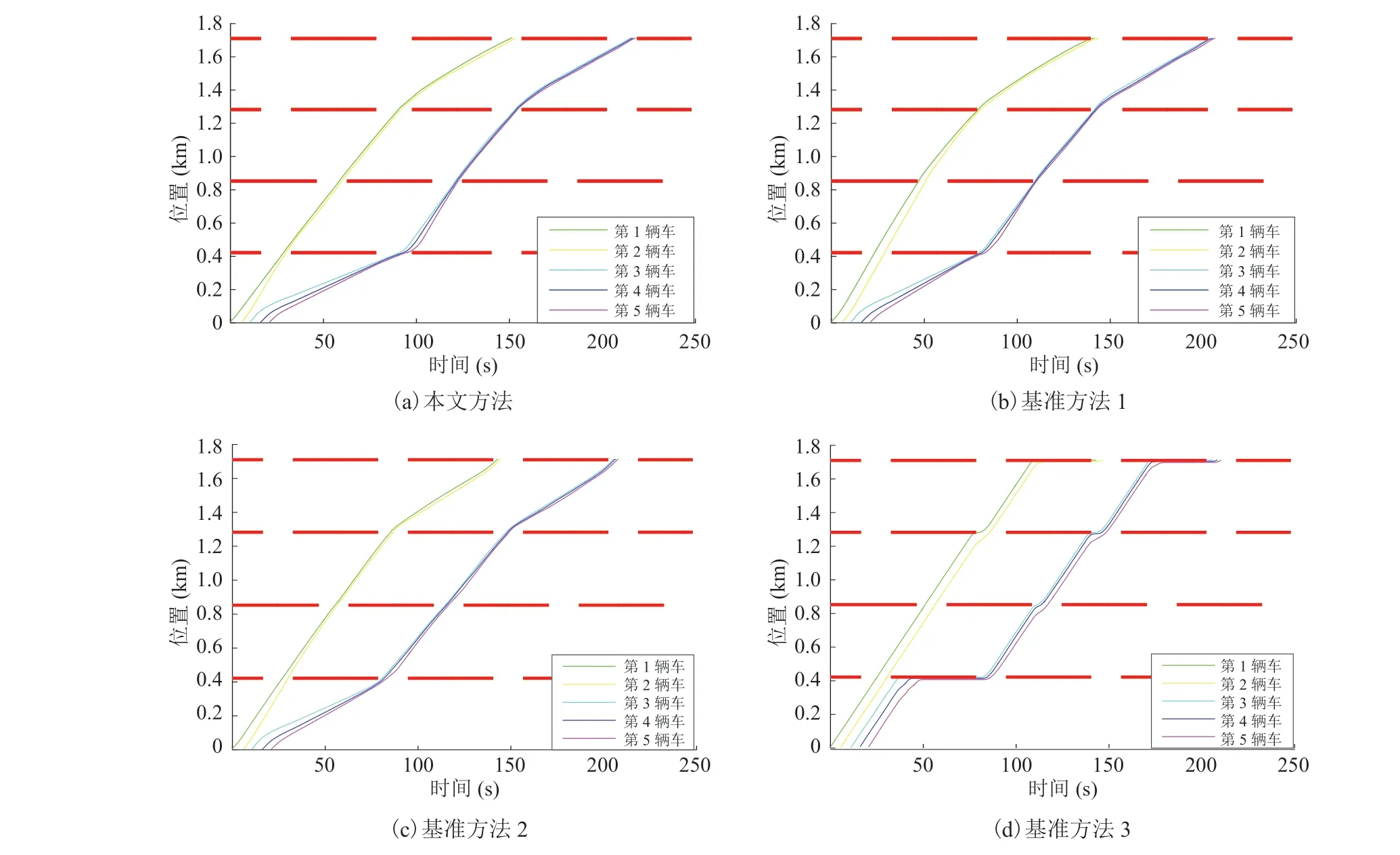
图10 不同控制方法中 5 辆车的行驶轨迹Fig. 10 Location trajectories for different methods
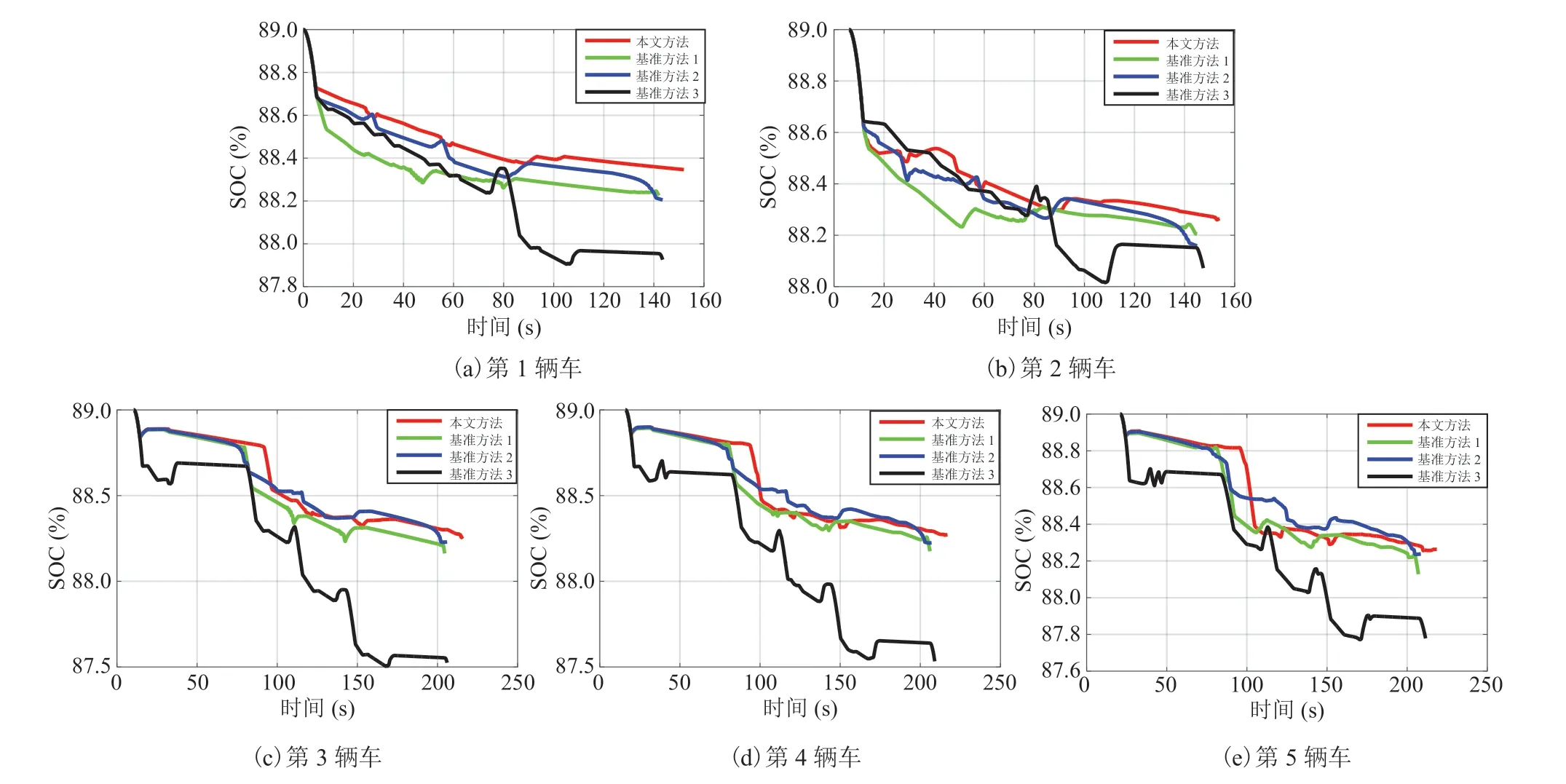
图11 不同控制方法中 5 辆车的 SOC 轨迹Fig. 11 SOC trajectories for different methods
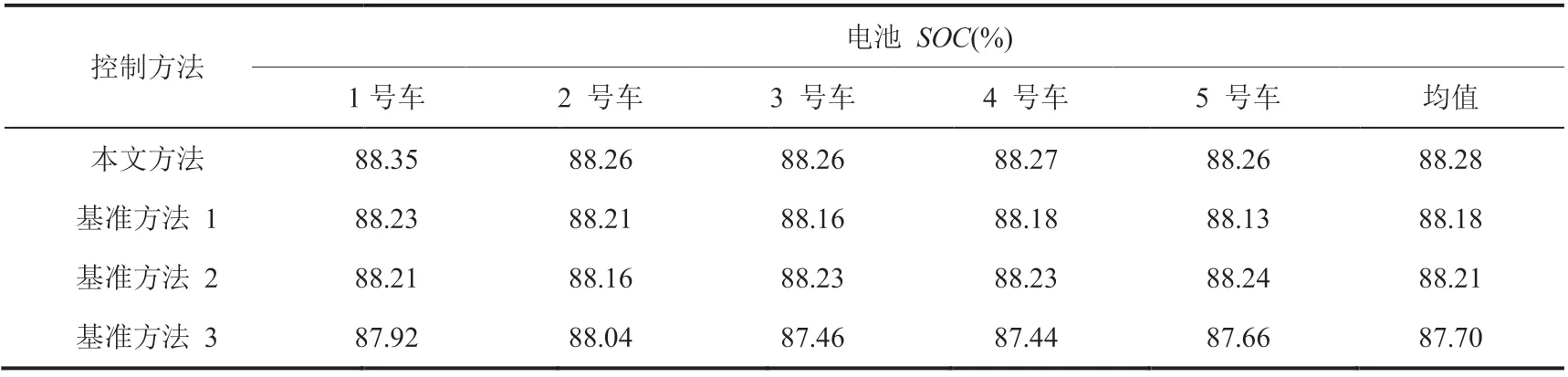
表4 不同车辆的电池最终 SOCTable 4 Final battery SOC of different vehicles
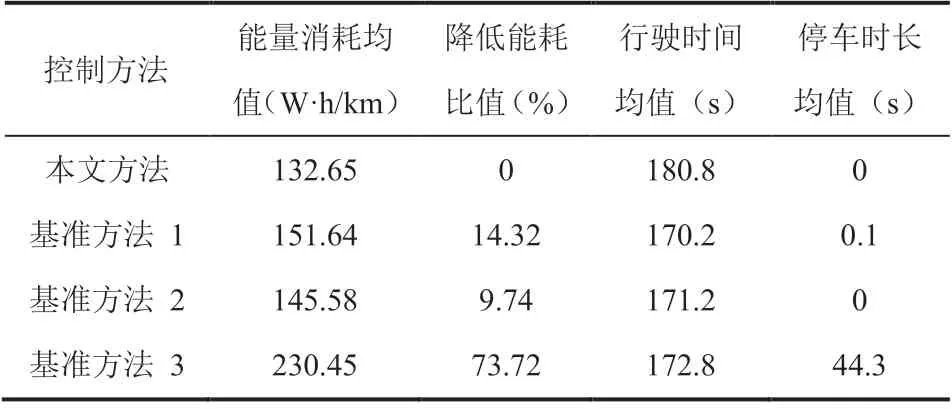
表5 不同控制方法的仿真结果Table 5 Simulation results for different control methods
5 讨论与分析
本研究提出了一种基于智能交通的车辆速度优化控制方法,具有一定优势。首先,与单个车辆的速度优化控制研究[8-10]相比,本研究对多个车辆的速度进行了优化控制。不仅考虑了周围的车辆,而且还考虑了 SPAT 对车速的影响,这更具有现实意义。其次,本研究所采用的瞬时优化方法计算快、实时性好。再者,多车辆交通场景的研究[11-13]需要考虑车辆间的跟车行为,这会使控制方法变得更加复杂,而本研究建立的 Vissim/Autonomie 仿真平台自带跟车模型,可以自动避免车辆发生碰撞,这简化了控制方法的实现。最后,与已有研究[14-19]采用根据经验获取的能量消耗模型相比,本文采用的是更具体的且经过试验验证的车辆能耗模型,有利于模拟车辆实际的能耗值。 本文方法的不足之处是只考虑了能耗,并没有考虑时间成本。如果在能耗的基础上还考虑时间成本,那么需要在经济车速和最大允许车速之间进行权衡。另外,本文方法的收益之一是减少车辆停在信号灯前的次数,而纯电动车在怠速时基本没有能量消耗,所以节能效果存在一定折扣。燃油车在怠速时会产生能耗,因此将本文方法应用于燃油车,节能效果应该更加显著。
6 结 论
本文以多智能网联汽车的交通场景为研究对象,以降低车辆停车次数和能耗为目标,提出了基于智能交通的车辆速度优化控制方法。本文方法以车辆的能量消耗模型为依据,综合考虑其他车辆以及 SPAT 对车速的影响,通过瞬时优化算法实时地确定车辆的经济车速。为验证本文方法的有效性,搭建了 3 个基准方法,并在 Vissim/Autonomie 联合仿真平台上对几种方法进行对比验证。结果显示,与基准方法 1、2 和 3 相比,本文方法能耗分别降低了 14.32%、9.74%、73.72%,验证了其在节能方面的有效性。
