一种基于SAR实时仿真平台的SAR回波生成系统∗
2020-09-28彭馨仪曾小东
彭馨仪 陈 东 曾小东
(1.中国电子科技集团公司第十研究所 成都 610036)
(2.陆军装备部航空军事代表局驻成都地区航空军事代表室 成都 610036)
1 引言
目前国内外已对SAR回波模拟技术、SAR仿真技术进行了一些研究[1~5]。意大利 Franceschetti研究了一种基于实际地面目标散射特性的原始数据模拟方法(即分布目标模型模拟方法),通过对观测区域的地面微波散射特性数据以及地面数字高程模型进行建模来得到回波数据[6]。国内研究人员提出了一种SAR回波信号模拟平台的系统结构,利用原始DEM数据构建了随机地表模型的电磁散射单元模型,由雷达电磁散射机理建立了自然地表目标的回波信号数学模型,完成SAR回波信号仿真平台的设计[7]。此外,国内研究人员还提出一种基于复杂目标三维模型运用物理光学(PO)法与增量长度绕射系数(ILDC)法结合的改进图形电磁算法快速计算目标雷达散射截面[8]。然而,上述研究提出的SAR雷达仿真方法往往只单独考虑SAR回波生成,未对SAR雷达系统在平台运动过程中的实时参数对回波生成过程的影响过程进行充分考虑,生成的回波往往不具有通用性。
为此,本文提出一种基于SAR雷达实时仿真平台的SAR回波生成系统。该系统基于雷达成像特性来生成雷达平台的运动轨迹,并根据待成像区域的目标、环境特性对待成像区域进行三维建模,然后利用SAR实时仿真平台得到SAR雷达实时电磁信息发射参数,将上述过程得到的雷达平台运动特性、目标及环境特性引入到SAR回波电磁特性生成,最后将生成的回波数据接入SAR雷达参数实时仿真中来实现成像区域的SAR成像。结果显示本文提出的SAR回波生成系统具有良好性能。
2 环境建模
2.1 平台航路生成
平台航路生成主要根据待成像的区域和成像距离,对平台航路进行规划,并利用STK软件根据规划的航路生成平台航迹数据。根据想定确定成像区域,利用STK应用程序创建场景,对于聚束SAR,通过加载配置文件得到的成像中心位置,并在三维地图上编辑平台的飞行轨迹,平台位置与成像中心位置的最大距离为想定成像中心斜距,平台飞行轨迹如图1所示,平台保持该轨迹飞行的最短时间为

其中,R为成像斜距,λ为雷达波长,v为平台速度,δ为雷达距离分辨率,θ为波束侧视角度。

图1 SAR飞行轨迹规划示意图
2.2 目标、环境建模
目标建模:根据待成像区域的地图场景确定需进行建模的目标(如房屋、飞机、桥梁、塔台等),采用三维建模软件(如UG、3D SMax、犀牛软件等)对场景中的目标进行(Computer Aided Design)几何建模。如图2所示。

图2 目标建模过程
三维场景建模:根据想定,在三维建模软件中导入想定对应的地图卫片数据,根据地图卫片在对应的位置摆放建好的目标模型,并对各不同地形地貌进行材质覆盖。
3 SAR雷达实时仿真平台
SAR雷达实时仿真平台生成主要实现仿真控制管理、系统时钟同步,并完成人机操作指令转换、仿真系统节点状态监控,及数据通信及管理,同时调用雷达模型进行计算并管理模型的输入输出,对成像结果进行显示。仿真界面如图3所示。

图3 SAR雷达实时仿真平台界面
本文主要对雷达模型进行关注,雷达模型主要实现根据平台的运动轨迹及当前的控制参数实时产生发射电磁信息,接收SAR回波生成软件产生的回波信号及反射电磁信息,并将收到的回波信息进行信号处理实现图像生成显示。SAR雷达仿真模型运行过程如图4所示。
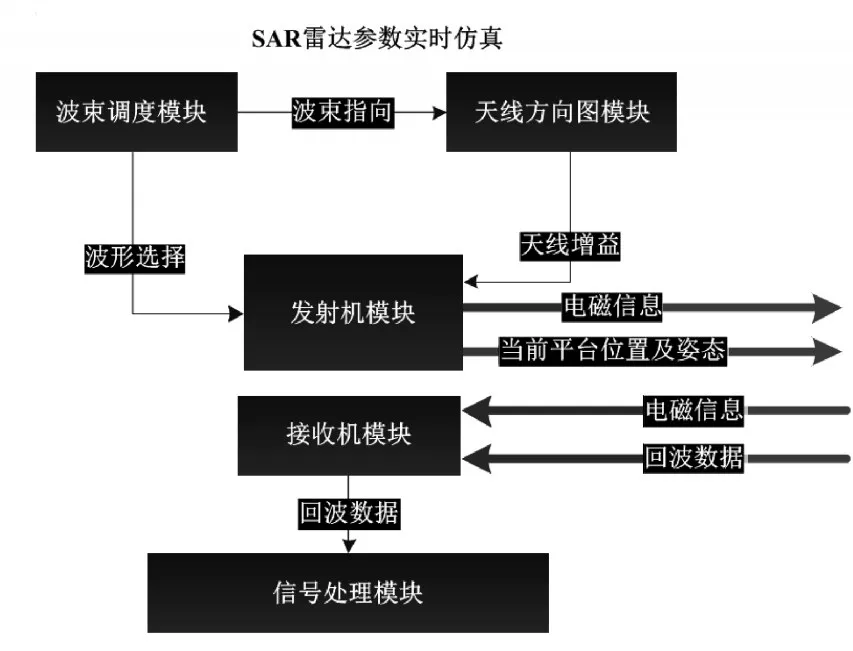
图4 SAR雷达实时仿真模型流程图
1)波束调度模块:根据外部输入的实时参数控制选择雷达工作模式、想定给出的成像区域、平台惯导数据实时计算天线波束指向;
2)天线方向图模块:根据波束调度模块得到的波束指向、外部输入的天线波束宽度、阵元数等参数计算天线增益、方向图;
3)发射机模块:根据外部输入的分辨率、成像范围、发射信号功率、信号频率、步骤1)得到的波束指向、步骤2)得到的天线增益、方向图、仿真实现雷达发射机功能得到电磁信号发射参数,按照SAR回波生成模块需要的格式打包发送给回波生成软件;
4)接收机模块:接收回波生成软件生成的回波数据,并根据接收机噪声系数、接收机带宽、接收机增益等参数仿真接收机对回波信号的功率放大、限幅、量化等处理,以满足成像质量要求;
5)信号处理模块:对接收的回波数据进行成像输出。
3.1 波束调度模块
假设感兴趣区域的中心点坐标(xr,yr,zr)、载机坐标(x,y,z) ,则:

则天线方位向波束指向为θAz=α,俯仰向波束指向为ϕEl=β。
3.2 天线模块[9]
根据波束指向、外部输入的天线波束宽度、阵元数等参数仿真计算天线增益、方向图等,其中天线增益为

其中θ3为天线方位向上半功率(3dB)波束宽度,ϕ3为天线俯仰向上半功率(3dB)波束宽度;天线方向图为[10]

其中θ为空间中某一方位角,ϕ为空间中某一俯仰角,N为天线阵面X方向阵元个数,dx为天线阵面X方向阵元间距,M为天线阵面Y方向阵元个数,dy为天线阵面Y方向阵元间距。
则当前波束指向位置的天线增益为

3.3 发射机模块
根据分辨率、输入的发射信号功率、输入的信号频率、想定给出的成像区域等参数仿真实现雷达发射机功能,主要体现在雷达信号频率、带宽、脉冲重复频率(PRF)等。其中,雷达信号带宽为

其中,δ为距离分辨率。其中,PRF需满足:

其中ρ为波束擦地角。
3.4 接收机模块
接收机模块主要用于接收回波生成模块生成的回波数据及电磁信号,并根据接收机噪声系数、接收机带宽、接收机增益等参数仿真接收机对回波信号的功率放大、限幅、量化等处理,以满足成像质量要求。其中,成像质量可用信噪比(SNR)表示,SNR可表示为[11]

其中,Pav为雷达发射平均功率;Gt为雷达天线发射增益;Gr为雷达天线接收增益;σ0为雷达波束视线方向,被照射目标区的雷达后向反射系数;δ为雷达距离分辨率;k为波尔兹曼常数;T0为系统噪声温度;v为雷达平台飞行速度;Ls为综合损耗因子;SNR为图像输出信噪比,一副清晰的图像要求信噪比大于5dB。
3.5 信号处理模块
利用距离-多普勒算法(RD算法)[12]对回波数据进行成像、输出。其中,RD算法流程如图5所示。

图5 RD算法流程图
4 基于SAR雷达实时仿真平台的SAR回波生成系统
回波生成软件将想定对应的地形高层数据、建好的三维场景、电磁信号参数及平台参数输入回波生成模块,进行回波生成,得到场景回波原始数据。
则基于SAR雷达实时仿真平台的SAR回波生成软件的系统流程图如图6所示。

图6 本文提出的系统的流程图
5 仿真结果
仿真设置场景为在距离某机场80km处对机场进行聚束SAR成像,下载得到该机场的数字高层数据及地图卫片[13],地图卫片如图7所示。

图7 仿真场景地图卫片
在犀牛软件中导入下载的地图卫片数据,根据地图卫片在对应的位置摆放建好的目标模型,并对各不同地形地貌进行材质覆盖,建好的场景模型如图8所示。

图8 建好的场景模型图
利用本文提出的SAR回波生成软件输出结果如图9所示。
可以看出,本文提出的基于SAR雷达实时仿真平台的SAR回波生成系统具有较好的成像性能,准确地反映了场景中的各个目标。
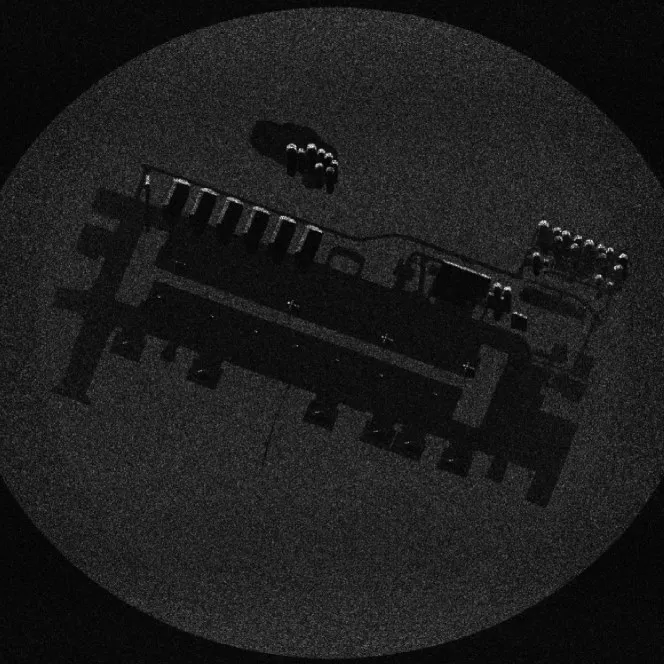
图9 本文提出的SAR回波生成系统结果
6 结语
本文提出一种基于SAR雷达实时仿真平台的SAR回波生成系统,通过在成像过程中考虑实时雷达系统特性、平台运动特性、目标环境电磁特性对SAR回波生成过程的影响来提高SAR回波生成的准确性。该系统首先根据SAR成像特性来生成雷达平台的运动轨迹,并对待成像区域目标、环境进行三维建模,然后利用SAR雷达实时仿真平台根据雷达平台的运动轨迹得到SAR雷达系统实时发射电磁信息,再将发射电磁信息实时输入SAR回波生成软件,同时将上述过程得到的目标及环境模型载入到SAR回波生成软件中进行回波生成,最后将生成的回波数据接入SAR雷达实时仿真平台来实现成像区域的SAR成像。结果显示本文提出的SAR回波生成系统具有较好的成像性能,为SAR雷达方案设计提供了有效的支持,具有实用性强的优点。
