空地协同下移动边缘计算系统的联合多无人机轨迹和卸载策略优化*
2020-09-27姚叶,崔岩
姚 叶,崔 岩
(中国人民解放军陆军工程大学,江苏 南京 210007)
0 引言
移动边缘计算作为一种低延迟、移动节能、上下文感知、隐私/安全增强的新的计算模式,相较于其他的计算模式[1],能减少网络操作和服务交付的时延,并为用户提供了更加快捷、灵活、高效的计算服务,提高用户体验[2]。
近年来,对于单无人机方面的应用,文献[3]考虑了研究了无人机环境下的计算卸载场景。其中无人机为多个用户进行能量传输和任务计算。而文献[4]和[5]都考虑了为多地面用户提供计算卸载服务的无人机MEC 模型。为了获得更多的计算支持、负载选择和更大的覆盖范围,一些现有的研究已经考虑了多无人机下的MEC 系统。例如,文献[6]将多无人机视为MEC 服务器,并研究了由两层无人机组成的MEC 网络的卸载问题。
目前对于MEC 系统下的地面基站和多无人机的联合优化还未涉及。其主要难题是这个目标问题是混合整数非凸性问题,并且优化参数之间存在强耦合性。为了解决这个问题,我们首先引入辅助变量对原始问题进行凹凸转换,然后分解该问题以处理原始问题的优化参数之间的强耦合性,最后我们提出一种JUTOSO 算法。仿真结果表明,我们所提出的优化算法可以显著提升该系统性能。
1 系统模型
考虑一个MEC 无线通信系统,服务平台集合m∈M={0,1,…,M},其中m=0 表示地面基站,m ≠0 表示空中无人机群,k∈K={1,2,…,K}个用户。如图1 所示,多个无人机和基站协作为多个地面用户服务,无人机和基站在与地面用户通信时共用相同频带。

图1 多无人机和基站协作下的MEC 系统
基站位于(0,0),地面用户随机固定分布且位置表示为Wk=[xk,yk]T,H表示无人机的高度,无人机飞行周期为T,T分为N个足够小的时隙,T=Nδt,n=1,…,N+1。无人机位置表示为Qm[n]=[xm[n],ym[n]]T。假设每个无人机完成飞行任务周期后都回到起始位置。
1.1 通信模型
考虑到实际情况,无人机和地面用户之间的通信链路为视距传输,即信道增益可表示为

其中ρ0是指参考距离为1m 的信道功率增益。地面基站和用户之间的通信链路为非视距传输(non-line-of-sight,NLoS),即信道增益表示为

其中α0是平均参考信道功率增益,η表示附加衰减,ζk[n]表示小尺度随机瑞利衰落,ηβ是路径损耗指数。无人机之间的距离可表示为

考虑无人机之间的最小距离dmin以避免碰撞,即

卸载决策变量sk,m[n],当用户卸载到无人机或基站时sk,m[n]=1,否则sk,m[n]=0。考虑在每个时隙中,每个无人机或基站最多只能服务一个用户并且每个时隙用户都会选择任务卸载到基站或无人机服务,

在无人机或基站处相应的信噪比可以表示为

假设地面用户总是以功率P传输,则总的数据传输速率表示为

1.2 时延模型
我们考虑传输时延表示为

Dk,n表示任务数据的大小,我们考虑无人机和地面基站的CPU 频率fk,m,当m=0 时表示基站的CPU 频率,m ≠0 时表示无人机的CPU 频率,则相应的计算时延表示为

即总时延表示为

1.3 能耗模型
我们考虑地面用户的总能耗,则地面用户在第n个时隙的总能耗为

即地面用户在无人机飞行周期T时间内的总能耗表示为

2 优化问题的解决
以上优化问题可以表述为

可以看出,原始问题P1 具有非凸目标函数、二元整数变量、非凸约束和强耦合性。我们处理过程如下。
首先,为了解决二元整数变量的问题,我们将sk,m[n]放缩到连续域,即sk,m[n]∈[0,1]。其次,为了将目标函数函数从非凸函数变换到凸函数,我们引入辅助变量tk,m[n],令tk,m[n]≥(Rk,m[n])-1,即又引入了新约束tk,m[n]≥0。原始问题P1 转化如下:


2.1 卸载决策的优化
为了处理原问题的耦合性,我们把原问题分解成两个子问题P2.1 和P2.2。首先我们固定无人机的轨迹和辅助变量tk,m[n],则原始问题可以表示如下:

可以看出,当P2 在无人机轨迹和辅助变量tk,m[n]固定时,P2.1 是一个可以用CVX 求解的凸问题。通过用CVX 求解该凸问题,可以得到子问题P2.1 的最优解[7]。
2.2 多无人机轨迹的优化
经过上述处理,我们固定卸载策略sk,m[n],将原始问题P2 转换为问题P2.2,如下:

其中Blog2gk,m[n]是关于无人机轨迹的函数,由于地面用户选择任务卸载到地面基站时,地面用户位置固定,故其数据传输速率是一个固定值,不需要做优化处理。仅考虑无人机卸载速率部分的优化处理:

引入辅助变量tk,m[n],并转换为两项相减的形式,即原式转换为

可以看到该问题仍然还是一个非凸问题,故我们引入新的辅助变量Dlk,m[n]和Drk´,m[n],做变换如下

则根据凸函数的性质我们可以最终转换为可行约束如下:

另外定义变量如下:

可以看到公式(23)是一个凸函数。
经过类似文献[7]中凹凸变换处理,我们将原始问题P2.2 转换为如下子问题P2.3:

从上述可以看出,该转换后的优化问题可以通过CVX 来解决。基于上述结果,我们提出了一种联合多无人机轨迹和卸载策略优化(Joint UAVs Trajectory and Offloading Strategy Optimization,JUTOSO)算法,如算法1 所示。
算法1 联合多无人机轨迹和卸载决策优化(JUTOSO)


3 仿真结果
我们考虑一个空中—地面合作的多无人机MEC 系统,其中K=3 个用户在90×90m2内随机分布。地面基站位于(0,0),无人机飞行一周后回到起点,无人机飞行高度为40m。根据[7]中的典型设置,我们设置了其他相关参数如下:T=10s,N=50,α0=30dB,η=-20dB,ζk,n=0.7651,ρ0=-60dB,Vmax=100m/s,σ2=-110dB,fu=109(cycles/s),fg=2.4×109(cycles/s),Pk,m,n=10dBm。
两架无人机的初始轨迹和优化后的无人机轨迹如图2 所示,地面用户随机固定分布在地面基站附近。从两个无人机的轨迹可看到,优化后的无人机轨迹总是趋向于在地面用户附近接收卸载任务,以减少地面用户的能耗。而在某些时刻会因为卸载决策的影响稍微远离地面用户。

图2 多无人机下的无人机优化/初始轨迹
在多无人机不同高度情况下,地面用户总能耗随着优化迭代次数的改变如图3 所示,我们可以看到,随着无人机高度的增加,地面用户总能耗也随之上升,这也符合了基本的物理定义。可以看到随着迭代次数的不断增加,地面用户总能耗趋向于一个固定值,即达到了局部最优解。
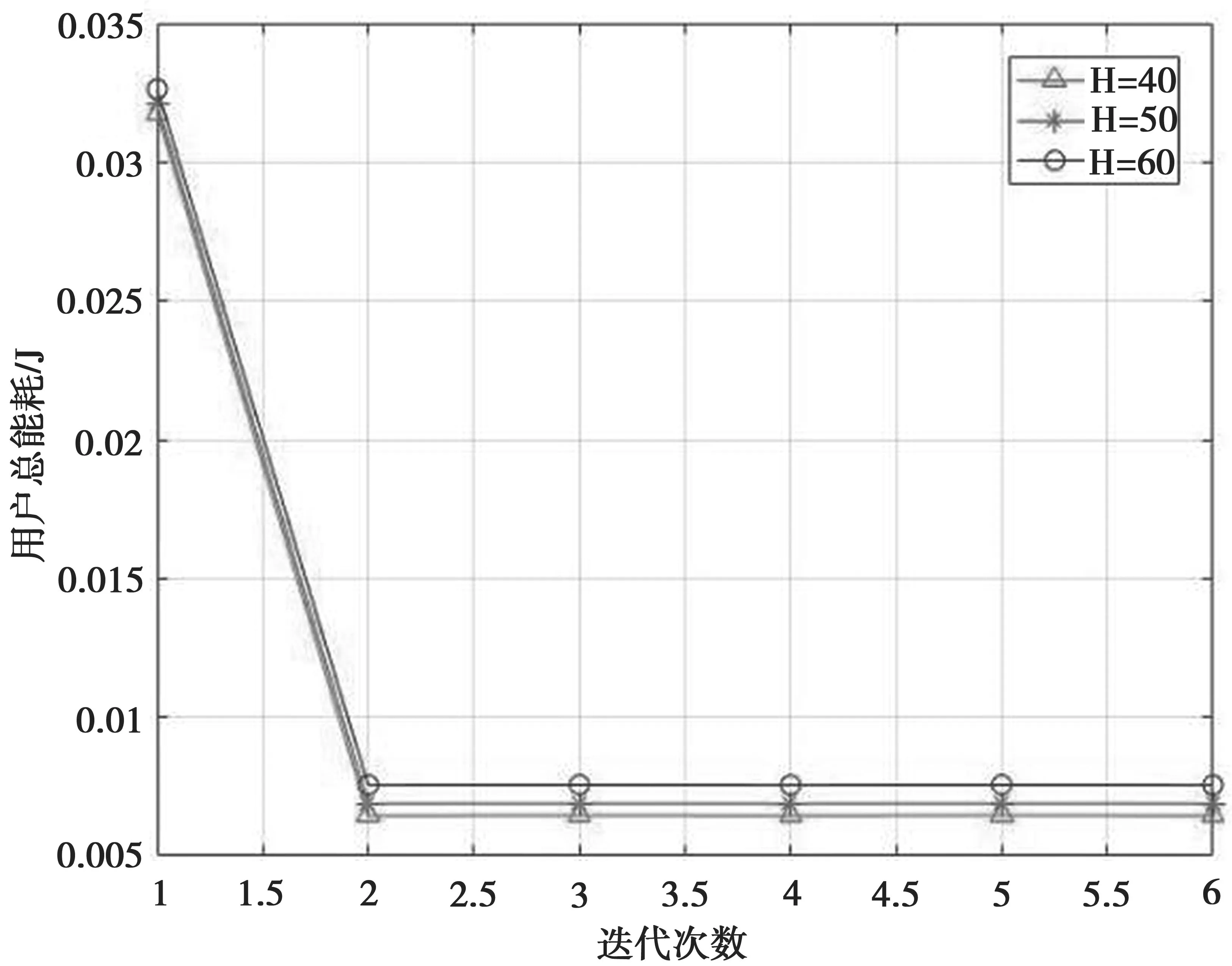
图3 不同高度用户总能耗与迭代次数的关系
我们仿真了不同地面用户发射功率情况下的不同优化方案的对比如图4 所示,从中可以看到随着地面用户发射功率的增加,地面用户总能耗也在增加。可以看到联合优化的方案明显降低了同等地面用发射功率情况下的地面用户总能耗,这也证明了我们的方案可以使地面用户总能耗得到明显降低。

图4 不同地面用户发射功率下优化方案对比
4 结语
在本文中,我们研究了多无人机和基站协作为地面用户服务的移动边缘计算系统的联合多无人机轨迹和卸载策略优化。在该系统中,为了使地面用户的总能耗最小化,我们提出了JUTOSO 算法,以联合多无人机轨迹和卸载策略。仿真结果表明,空地协同下的MEC 系统性能得到大幅提升,并且通过对多无人机轨迹和卸载策略的联合优化,地面用户的总能耗也大幅降低。
