太阳能风能水下打捞机器人
2020-09-24黎植强杨小令卞君杰胡秋艳
黎植强 杨小令* 卞君杰 孙 浩 胡秋艳
0 引言
水下打捞是一种特种作业。早期的水下打捞,主要靠潜水员完成的。受生理条件限制,潜水员一般只能下潜到100 米以内,而且需要岸边或船上支持团队的保护。
20 世纪60 年代,出现了遥控水下机器人,可以代替潜水员完成部分水下打捞作业,减小了劳动强度和风险。但是,仍然需要岸边或船上人员近距操控,成本甚至高于潜水员打捞。近年来由于太阳能和风能技术水平的提高,以及无人无线技术的开发,由太阳能或风能供电的水下打捞机器人的开发层出不穷[1-3]。
1 研究意义
本文研究设计了一种远程控制、太阳能风能供电的水下打捞机器人,操纵人员可以借助无线图像传输技术,引导打捞机器人到达指定水域,完成水下探查和打捞。因为采用太阳能风能供电,可以连续巡航、进行大范围的搜索。
2 总体设计
太阳能风能水下打捞机器人由双体无人船和水下打捞机器人组成,具有结构新颖、运输方便、使用便捷的特点。
双体无人船由模块化双体船体、可调节门架、太阳能电池板、垂直轴风力发电机、正反转螺旋桨、防水电机、绞盘、测控模块组成。双体无人船因为配备了太阳能风能混合供电系统,晴天和风雨天都能提供足够电力,可以长时间、大范围携带水下打捞机器人巡航,并为打捞机器人提供能源供给和通讯中继,大大降低了打捞作业成本和风险。
水下打捞机器人由外壳、反向串联推进器组、水下机械手、姿态调节装置、脐带电缆、测控模块组成。反向串联推进器组与姿态调节装置配合,省去了垂向推进器、横向推进器、射流水枪,使水下打捞机器能轻松实现前后、左右、上下3 个维度的平移,左右转弯、上下俯仰2 种维度的转动,配合水下机械手,能轻松打捞水下小型物体。
3 详细设计
3.1 双体无人船
主要技术指标:最小吃水深度200 mm;巡航速度1.5 km/h;续航距离18 km;锚定最大深度100 m;太阳能发电80 W;4 级风速发电50 W;整体外形尺寸:长1 200 mm、宽400~1000 mm、高400~700 mm;空气中重量88 kg。
3.1.1 模块化双体船体
借鉴国内外无人船的经验,仍然选择双体船结构,为无人船提供足够浮力和稳定支撑。考虑到长途物流运输和单人安装维修,单个船体采用3 模块拼装而成:中部是矩形船身,内部有蓄电池盒,整体的重心低;两头是等腰三角形船头,外衬防撞橡胶垫。
3.1.2 可调节门架
用可调节门架联接左右双体船体,步进电机驱动螺杆旋转,改变门架的跨度在400~1 000 mm 范围变化,高度在0~300 mm范围变化,无人船的重心、螺旋桨淹没深度和太阳能电池的倾角受远程控制,使无人船与工作环境相适应。
(1)航行状态这种状态为正常水域航行状态。调节装置处于中间状态,正反向旋转螺旋桨淹没在水下,打捞机器人处于水面以上,航行时水阻力减小。这种情况下无人船的航速最大,能够快速到达打捞水域,进行相关打捞作业,同时节省能源。
(2)水草状态 这种状态无人船遇到茂密的水草。调节装置收缩至最小长度,将无人船门架抬到最高,螺旋桨的一半淹没,一半未淹没。水草不会缠绕螺旋桨,出水后沿切线向航道两边飞出。
(3)打捞状态这种状态为打捞机器人作业状态。此时调节装置伸展至最大长度,无人船重心降低,风阻力减小,稳定性增强。
3.1.3 正反向旋转螺旋桨
正反向旋转螺旋桨由1 个正向旋转螺旋桨和1 个反向旋转螺旋桨配对而成。正向旋转螺旋桨顺时针转动,向后排水,产生向前推力;反向旋转螺旋桨逆时针转动,向后排水,产生向前推力。正反转螺旋桨配对,附加力矩相互抵消,无人船不会发生横向倾斜。
3.2 水下打捞机器人
主要技术指标:下潜最大深度:100 m;最大移动速度:0.2 m/s;空气中质量:15 kg;外部尺寸:长508 mm、宽382 mm、高322 mm;最大可视距离(清水)5 m;清晰度420 线(彩色);机械手抓取质量:10 kg。
3.2.1 壳体
壳体采用密封式结构,用防水材料制成密闭的流线形体,全部水下部件内藏在密封壳体内。密封式壳体的制作复杂,但不要求全部水下部件密封防水,扩大了选材范围,降低了材料成本。另外水流阻力较小,可减小电机的功率和蓄电池的容量。
3.2.2 反向串联推进器组
采用两个推进器背靠背组成一个反向串联推进器组,这种推进器组的向前向后推力相同。纵向并列两个反向串联推进器组,可实现原地转弯。除此而外,还可实现左右横移、原地喷水冲刷,省去了横向推进器和喷水水枪。
3.2.3 水下机械手
机械手嵌入于底座支架,用防水电磁铁作为驱动机构。机械手常态为闭合状态。电磁铁通电,机械手展开,抓取物体;电磁铁断电,机械手依靠弹簧弹力复位,夹紧物体,这样耗电最少。
3.2.4 姿态调节装置
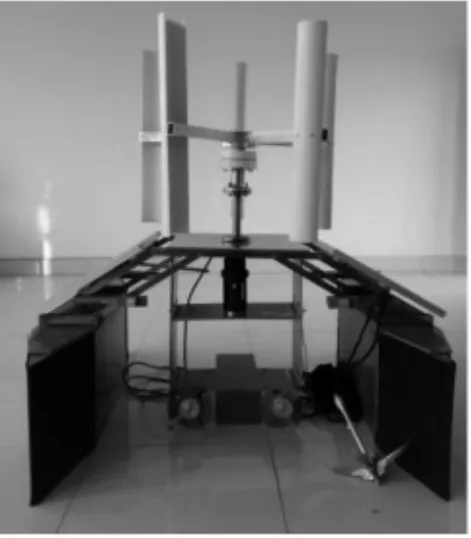
图1 太阳能风能双体无人船

图2 水下打捞机器人
设置了姿态调节机构,能改变外壳轴向与水平面之间的下倾角。姿态调节机构主要是靠移动密封式外壳内质量块的位置,改变重心位置:外壳现状不变,浮心位置始终不变,这样可改变下倾角。当下倾角为0°时,水下机器人在水平方向游动;当下倾角为90°时,水下机器人在垂直方向游动,可实现上下浮潜。下倾角可在0°至90°之间变化,水下机器人就能在纵向垂直面内斜向游动,斜向游动时将头部对准目标,然后径直游向目标,大大节省时间。采用姿态调节方法,可省去垂向推进器和摄像机的摇头机构。
4 结语
太阳能风能水下打捞机器人采用太阳能风能混合能源,是绿色环保型产品,不会对打捞水域产生污染。它能在0.3~100 m水深范围内巡航,甚至于水草茂密的滩涂、湿地,这是大型打捞船队没法实现的。它能连续打捞10 kg 以内水下小型物体,完成水下标本采集、水下物证搜寻、水下遗物捞取等任务。
无人船空气中重量80 kg,全部拆解后可以装入长600 mm、宽200 mm、高400 mm 的4 个包装箱内;机器人空气中质量:15 kg,可以装入长520 mm、宽400 mm、高350 mm 的1 个包装箱内。可以搭乘飞机、高铁、大巴车,运输方便。单人可以胜任现场安装维护工作。
晴天,利用太阳能发电;风雨天,2 级以上风力,风力发电机就能正常发电。蓄电池充满电后,可以连续供电12 小时,以巡航速度1.5 km/h 计算,最大连续巡航距离18 km,可以环绕20 km2的水域一圈。
太阳能风能水下打捞机器人经济实用性强、标准化程度高,将在交通、海事、公安、水利、水产、环保等领域发挥重要作用。