基于RobotStudio 的带导轨工业机器人轨迹编程方法
2020-09-24马少龙刘晓营
梁 舒 马少龙 刘晓营
0 前言
带导轨的工业机器人系统一般应用在焊接、喷涂等领域,导轨可以增加工业机器人的工作范围,进而提高工作效率。离线编程是一种对机器人程序进行编程调试的技术,使用计算机仿真软件对机器人程序进行虚拟仿真,具有可视化的工作界面,可以在工业机器人工作站系统搭建的同时进行工业机器人程序的编程调试,并且有自动调试工具的辅助,可以方便地对工业机器人应用系统的工作流程进行验证。本文通过对导轨和机器人在仿真软件中进行联合调试,介绍了带导轨工业机器人轨迹编程的通用方法,该方法可进一步推广到相关的离线编程调试中,提高编程效率。
1 创建带导轨的工业机器人系统
使用离线编程技术对工业机器人工作站进行虚拟仿真,首先需要搭建工业机器人虚拟仿真工作站。工业机器人工作站主要由ABB 工业机器人IRB 4600、导轨IRBT 4004及焊枪工具组成。导入导轨后,将机器人安装到导轨上,系统会自动将导轨与机器人进行同步,编程时将导轨作为机器人外轴进行处理,即可保证机器人和导轨的协调运行。验证轨迹编程的方法还需要建立待加工工件,本次实验在导轨两侧分别建立圆柱体和长方体的模型,计划将机器人焊枪工具的TCP 沿着模型的上边缘运动,完成轨迹编程的调试。机器人工作站的整体布局如图1 所示。
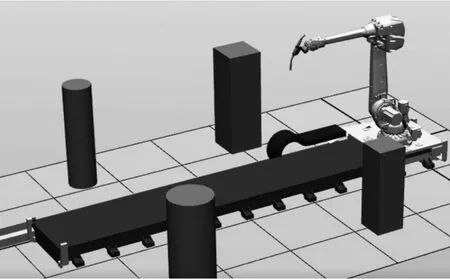
图1 工业机器人工作站整体布局图
2 带导轨的工业机器人系统的示教编程
机器人在工作过程中需要在导轨上移动,就产生了多个工作位置,在编程调试机器人工作路径前,需要先调试好机器人能否顺利移动到工作位置。首先在机器人的原点位置示教目标点并重命名为pHome,作为机器人的初始位置。然后将机器人1轴旋转90°,面向第一个工作位置,示教目标点作为过渡点,再拖动导轨,将机器人移动到第一个工作位置,示教目标点作为第一个工作等待位置。随后使用MoveJ 关节移动指令,将目标点添加到新路径中,并验证转移动作能够顺利完成。
在机器人到达第一个工作位置后,首先对工作路径进行示教编程。使用MoveL 线性移动指令,依次对长方体的四个角点进行示教,然后通过复制回到工作等待位置的指令,使机器人在完成工作轨迹后回到等待位置,准备向下一个工作位置移动。拖动导轨,将机器人移动到第二个工作位置,使用MoveJ 关节移动指令进行示教。第二个工作轨迹是一个圆形,通过示教线性移动指令,再将圆弧的过渡点和终点转换为MoveC 圆弧移动指令,即可生成圆弧轨迹。圆形路径调试完成后,添加机器人回到第二个工作等待位置的指令。
所有工作路径调试完成后,添加回到原点的指令,并对整体工作站系统进行仿真运行。使用基本选项卡的同步功能,将工作站对象中的路径等参数与工业机器人虚拟控制器的RAPID 代码匹配,在工业机器人虚拟控制器中生成相关的RAPID 程序。在仿真选项卡的仿真设定菜单选择需要进行仿真的控制器和控制器所控制的机器人,选择单周期运行,将子路径作为程序指针的进入点,使机器人从子程序的第一行开始运行。在虚拟仿真工作站视图界面,观察机器人仿真运行的状态。
3 带导轨的工业机器人系统的轨迹编程
示教编程完成后,对导轨另一侧的待加工工件用自动路径的功能生成机器人工作路径。建立空路径并重命名为main,作为工业机器人的主程序,并在主程序中提前示教机器人到达第三个工作位置的指令。机器人工作路径使用软件的自动路径功能,生成子路径后,插入到主程序中。机器人通过导轨在工作位置间移动,仍然使用在主程序中示教关节运动指令的方式。
机器人到达工作位置之后,捕捉待加工工件的上表面边缘,自动生成机器人工作子路径。子路径生成后,目标点所对应的工具坐标方向是随机的,在机器人TCP 点沿着轨迹运行时,工具方向也在随时产生变化,工具姿态的变化也会进一步影响工具的加工对象,而且容易损坏连接工具的焊丝和电缆等部件。需要进一步调整所有工具的姿态,使得工业机器人在运行过程中保证工具姿态的稳定,在虚拟仿真软件里,需要找到一个工具方向合适的目标点,并将其他目标点的方向统一修改为此标准目标点的方向。修改完成后,需要为每一段子路径进行轴参数进行自动配置并选择沿着路径运动,保证在此种工具姿态下,机器人对每一个目标点的可达性以及所有路径运动的可行性。
所有工作子路径和过渡动作调试完成后,添加回到原点的指令,并对整体工作站系统进行仿真运行。在仿真选项卡中将主程序main 作为程序指针的进入点,使机器人从主程序的第一行开始运行。在虚拟仿真工作站视图界面,观察机器人仿真运行的状态。
4 结语
综上所述,通过上述实验,介绍了带导轨工业机器人轨迹编程的两种常用方法。其中示教编程适用于加工路径简单,以直线为主,目标点较少的情况,编程简单便捷。捕捉轨迹编程适用于加工路径复杂,曲线路径多,目标点多的情况,使用自动路径命令,捕捉的曲线可以自动生成机器人的工作路径,节省了大量对目标点示教的时间。在联合实际设备进行调试时,只需要现场示教几个关键点,机器人就可以按照虚拟仿真中的路径进行工作。基于RobotStudio 软件的带导轨工业机器人离线编程方法可以应用在多种工业应用中,对提前验证工业机器人应用系统的工作流程、提高工业机器人的编程效率都有很大的实际意义。