基于IWR1443 毫米波雷达传感器的液位测量方法
2020-09-24刘丁元杨科锋徐阳扬
刘丁元 杨科锋* 徐阳扬 陈 明
0 引言
在工业领域,危险液体液位的安全、实时、准确探测在运输、储存和使用中具有非常重要的地位[1]。典型的液位探测技术有磁致伸缩式液位计、差压式液位计和导波雷达液位计[2],相比于传统的液位探测方法,基于雷达的非接触式液位探测器,不受被测介质形态影响,不与被测介质接触,不仅能够适用一般应用场景,还能适用于强腐蚀、高温高压等恶劣工况。同时还具有安装维护便利,量程范围广等优点。TI 公司的IWR1x 系列传感器是工作在76~81 GHz 级的超宽带毫米波雷达芯片,工作带宽可达4 GHz,最高可达5 GHz。在该工作频段,处理系统组件特别是天线的尺寸可以很小,另一优势是准确度高,在该工作频段,系统能够检测小至零点几毫米的移动,所以探测精度也非常高,在液位探测特别是危险液位探测领域有着较好的应用前景。
1 雷达液位探测的原理
非接触式雷达液位探测原理如图1 所示。
电磁波信号由雷达天线端向探测对象发出,发射波接触被测液体表面后被反射产生回波信号,由接收天线接收。根据时间扩展原理,由发射时间和接收时间差,计算出液体表面距雷达的距离,再根据雷达天线的安装位置信息,推算出液位值。根据雷达测距原理,液面距雷达的距离由式(1)给出。


图1 雷达液位探测示意图
式中c 是电磁波传播速度,是常数,τ 是发射信号到接收回波的时间延时。
由于雷达天线的位置是固定的,且可精确测得其安装位置信息,所以测得的液面到雷达的距离精度就决定了液位测量精度。
在液位探测应用领域,某些情况下需要探测装置能够及时准确测得液位变化情况,此时就需要探测装置有高的距离分辨率。对于雷达液位探测计而言,根据雷达原理和傅里叶变换理论,距离分辨率是由雷达信号带宽决定的,即

式(2)中B 为信号带宽。对于IWR1x 系列传感器,工作信号带宽为最高可达数GHz,将有约为数厘米的距离分辨率,比如带宽为4 GHz 的情况下理论距离分辨率约为3.75 cm,也就是说液面如果有3.75 厘米以上的变化时,都可被探测装置测得[3]。这对于工业领域中一些高精度应用需求非常有用。
2 IWR1x 毫米波传感器
IWR1x 毫米波传感器是TI(Taxes Instrument 德州仪器)公司推出的横跨具有完整端到端开发平台的76-81GHz 传感器,它具有小于4 厘米的距离分辨率,距离精度低至小于50 微米,范围达到300 米。借助IWR1x 传感器,在设计雷达液位探测器时就不用再去处理分立式前端、模数转换器和处理器件之间的复杂高速数据和通信走线,也不用处理额外尺寸、功率和支持它们的相关物料清单成本。而且这个集成度还简化了软件设计过程,极大简化了器件配置、监控和校准[4]。
在本文的研究中选用该系列中的IWR1443 芯片作为液位探测器的传感器,该传感器是TI 公司为工业领域进行距离、速度和角度测量而设计生产的芯片[5]。该芯片是基于FMCW(Frequency Modulated Continuous Wave 调频连续波)雷达技术的集成单芯片毫米波传感器,工作频率76-81 GHz,信号连续带宽达4 GHz,采用了TI 公司的45 nm 低功率射频CMOS 技术,该技术可以使传感器的尺寸降低到一个前所未有的水平。该芯片包含一个独立的三通道发四通道收的收发系统和AD转换器,支持FFT 运算和CFAR 检测的硬件加速器,此外,还有两个ARM 处理器分别用于控制和运算,所以,该芯片具有从前端端到信号处理,再到后端结果的完整处理能力。因此在工业应用领域中使用该芯片时只需进行简单的外围电路设计并使用TI 公司提供的开发套件进行开发即可实现应用,大大地简化了工作量并且丰富了它的应用场景。同时TI 公司为进一步方便工程人员使用该芯片还提供了基于该芯片的评估板,有了该评估板在一些简单的应用场合甚至不需要工程人员进行硬件设计,只需使用TI 公司提供的开发套件进行开发即可在工业领域中进行应用。基于这些优势,本文使用了该评估板进行雷达液位测量方法的研究。
IWR1443 毫米波传感器评估板如图2 所示,它以IWR1443传感器为核心,集成了必要的外围设备和电路,并且还提供了收、发天线阵。在一般应用情况下,开发人员无须再设计和使用其他硬件,即可在TI 公司提供的开发环境下进行应用开发,非常便利,这也是本文选择该评估板作为毫米波雷达液位探测装置的原因。
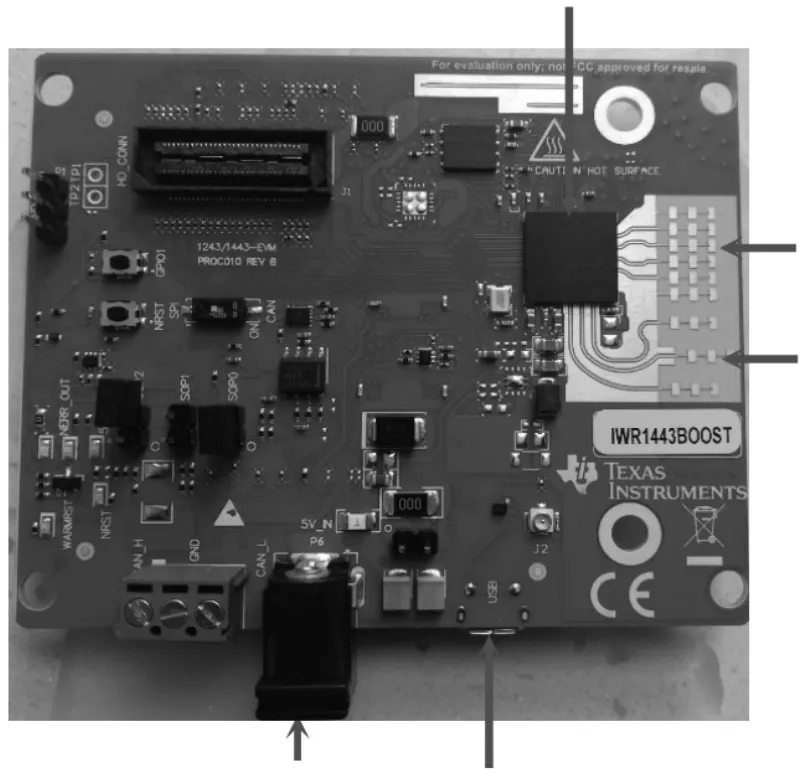
图2 IWR1443 评估板
3 m m Wa ve S DK 软件工具
TI 为开发人员和终端使用人员提供了开发软件工具包,该工具包可直接用来使用和开发评估板。它包含了最基本的功能模块,即使是终端使用人员也可以利用该工具包快速的使用该评估板进行应用[6-7]。为了使用SDK 工具包,除了安装SDK 工具包以外,还需要配置开发环境所需的外部软件,这些软件都可在TI 官网免费下载。经过配置好的开发环境和可视化界面如下图3 所示。
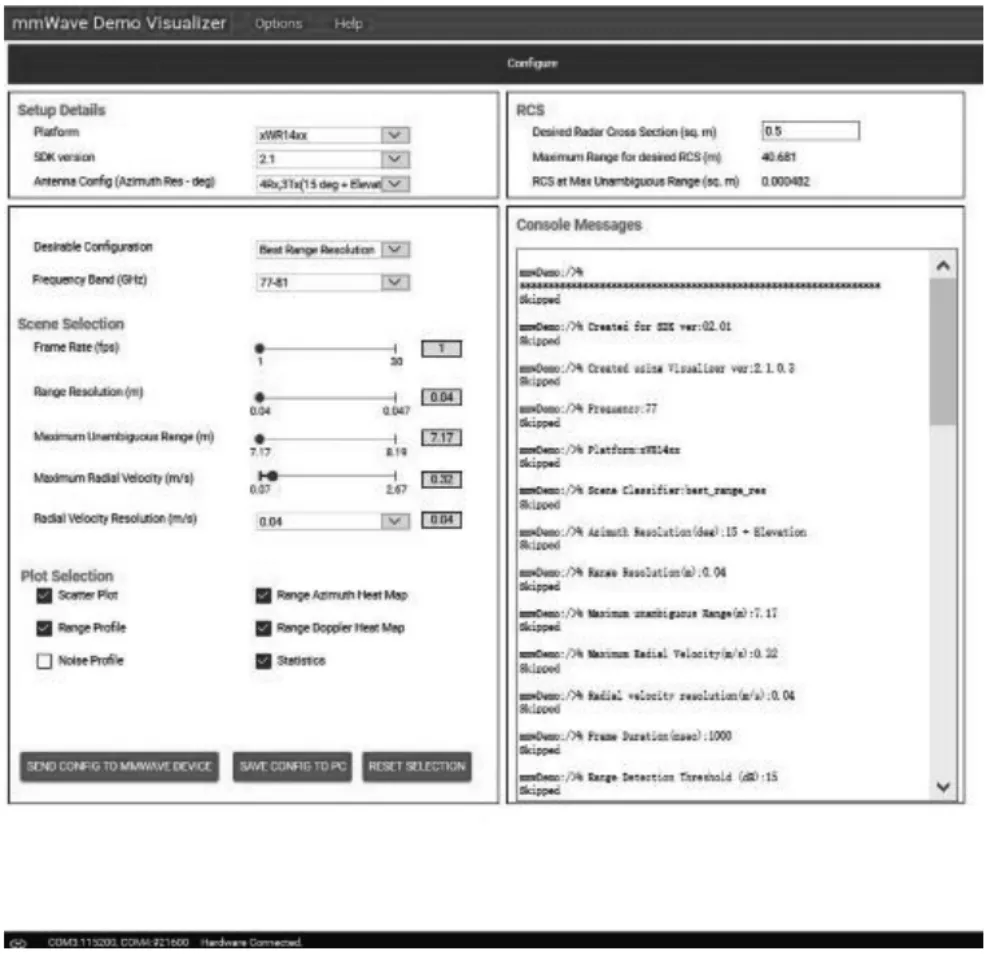
图3 可视化配置界面
由于这里只进行高精度的距离测量,因此在配置中采用了最优分辨率的方式,对于速度测量不做要求,所以配置时选择默认值即可。
4 基于IWR14 4 3 的雷达液位探测器
基于IWR1443 评估板的液位探测器测试连接关系如图4 所示。

图4 连接测试图
它和PC 机通过USB 线连接,PC 机通过USB 接口对它进行控制实现测量,同时测量结果通过USB 传输回PC,在对应的可视化界面进行显示。由于IWR1443 具有完整的数据处理过程,因此对于一般的应用,传感器传输回的数据即可直接应用。但是,如果需要测量更丰富的信息,则需要先采集IWR1443 接收通道ADC 输出数据,再根据应用需要做进一步的处理,以提取所需的信息,而要进行数据采集则还需要其他外部硬件设备和处理工具。本文由于研究的是一般背景下的测量,所以这里直接使用传感器传输回的数据。在天线的正下方放置了一盆带有颜色的液体,用来最为被测液面。
根据液位测量的需求,经使用SDK 工具对评估板的功能进行开发,使开发板在PC 机的控制下实现了对盆中液体液位的测量。实际测量结果如图5 所示。
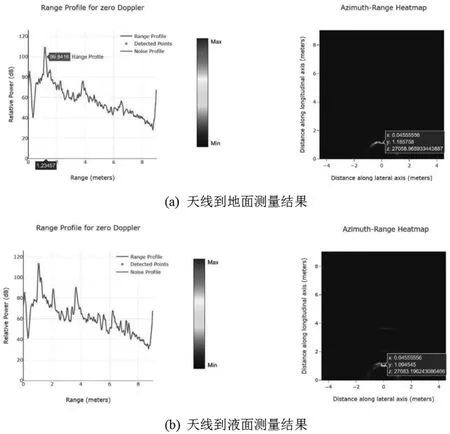
图5 测量结果
图5 (a)为未放置液体时的测量结果,即测量的是地面到天线的距离;图5(b)为放置液体时的测量结果,即测量的是天线距液面的距离。为了确保结果完整可信,测量时分别选取了零多普勒-距离剖面图测量结果和热图测量结果,以便进行对比分析。测量数据及换算获得的液面高度如表1 所示。

表1 液面测量数据及计算结果对比
说明:在换算液面高度时已经考虑了盆底厚度(约为2 mm)的因素。
从表1 中可以看出,使用经过开发的IWR1443 传感器测得液面高度与实际测量结果完全吻合。虽然本文在研究过程中,实验测试条件简单,但无论是零多普勒-距离剖面图还是热图的测量数据经换算后得到的液面高度误差都小于1 cm,测量精度非常高,完全得到了准确的液位值,验证了本文提出的液位测量方法的有效性和准确性。
5 结论
本文针对工业领域,特别是石油、化工领域储存、运输、生产等情况下液位安全准确测量问题,给出了一种基于IWR1443的测量方法和方案。该方法使用TI 公司的IWR1443 毫米波传感器作为测量装置的核心,该传感器具有从前端到终端的完整功能,即包含射频前端,接收通道,AD 转换,中频处理,数据处理,控制单元等,经过开发人员或终端使用人员的开发,其输出的结果可直接用于液位的测量。最后本文在IWR1443 评估板上进行了开发实验,验证了所提方法的有效性和准确性,为工业领域中液位测量,特别是危险液位的非接触测量提供了一种有效的高精度方法,具有较好的应用前景。