基于双目视觉的无障碍智能家居控制系统设计
2020-09-23郑钰莹袁傲冰
郑钰莹 袁傲冰

摘 要: 针对传统控制系统在运行过程中控制指令数据损失量过大,导致控制系统控制范围过小的问题,设计一种基于双目视觉的无障碍智能家居控制系统。硬件部分采用ARM处理器,处理控制数据,内设一个无线数传模块,满足系统多点通信控制要求;重新定义单片机管脚功能,在单片机每对VCC和GND管脚上放置一个短引线的电容,完成主控电路的设计。软件部分使用神经网络层处理控制系统中不同的家居单元,计算出控制指令数据损失量,利用Java编程控制各个控制指令,完成控制系统的软件设计。实验结果表明,与传统控制系统相比,基于双目视觉的无障碍智能家居控制系统可控制的范围更大,更适合实际推广使用。
关键词: 智能家居; 控制系统; 双目视觉; 数据处理; 软件设计; 指令控制
中图分类号: TN929?34 文献标识码: A 文章编号: 1004?373X(2020)18?0067?04
Abstract: In allusion to the problem that the control range of the control system is too small because of the excessive loss of the control instruction data in the operation process of the traditional control system, an accessible intelligent home control system based on binocular vision is designed. In the hardware part, ARM processor is used to process the control data, in which a wireless data transmission module is set to meet the requirements of multi?point communication control of the system. The pin function of the single?chip microcomputer (MCU) is redefined. A capacitance with short lead is placed on each pair of VCC and GND pins of MCU to complete the design of the main control circuit. In the software part, the neural network layer is used to deal with different household units in the control system, the loss of control instruction data is calculated, and each control instruction is programmed with JAVA to complete the software design of the control system. The experimental results show that, in comparison with the traditional control system, the accessible intelligent home control system based on binocular vision has a wider control range, and is more suitable for promotion and practical application.
Keywords: intelligent home; control system; binocular vision; data processing; software design; instruction control
0 引 言
無障碍智能家居系统是一项针对老年人或是视觉、听觉出现障碍的用户所设计[1]的,通过构建高效的智能住宅设施与家庭事务管理系统[2],将其安置于居住环境,智能化的操作方式解决了老年人日常生活中的家居问题[3]。传统的智能家居控制系统采用总线组网的方式,将设备通信和控制全部基于一条总线上,导致布线工程与现场施工任务过重,后期发展的扩展性差,不适合实际推广使用[4]。双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它基于视差原理并利用成像设备从不同的位置获取被测物体的2幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息,具有较强的扩展性。随着我国人口老龄化程度不断加深,智能家居需求增大,将双目视觉技术应用于无障碍智能家居控制系统,是时代发展的必要[3]。将移动终端与家居设备连接起来,集中控制、远程操作家用电器与安防设施,可以更好地保证老年人或是残疾人士的日常需求,保护他们的人身安全。
1 控制系统硬件设计
1.1 设计控制开发板
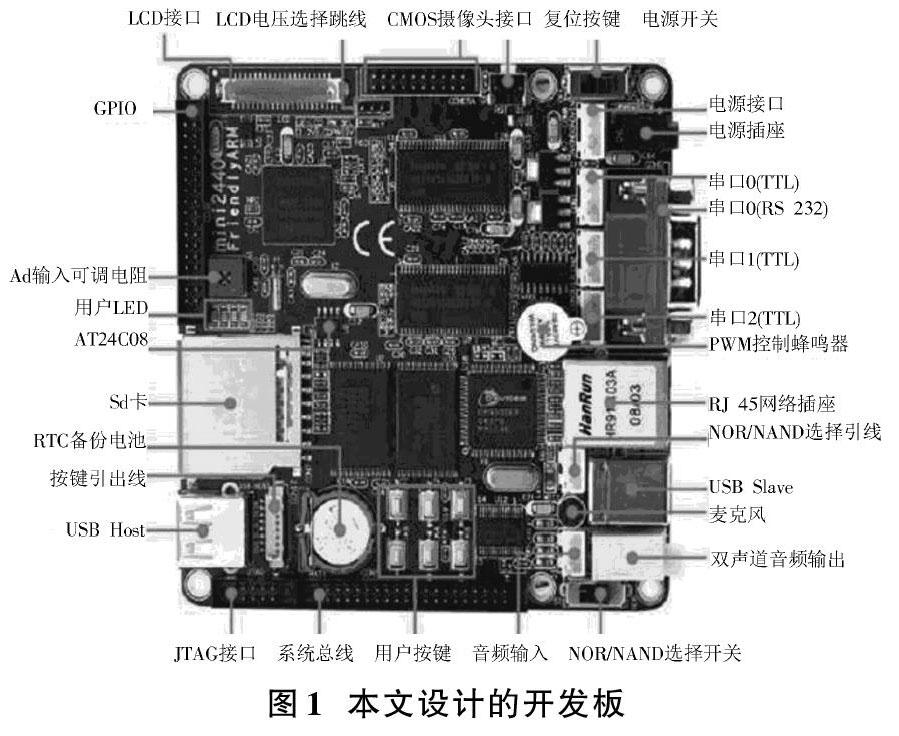
开发板处理器选择ARM处理器,利用其32位的精简指令集处理器架构,兼容多个8位和16位器件。芯片使用S3C2440微处理器,其内部集成ARM920T内核的16/32位RISC嵌入式微处理器,支持主频[5]400 MHz,最高至522 MHz。使用一个LCD显示,连接以太网RJ 45接口。将3个串口接口,分别连接USB Host,USB Slave B型接口以及PWM控制蜂鸣器。将摄像头接口连接开发板的拓展接口34 Pin GPIO引脚,最终接入到40 Pin系统的总线接口。实际的开发板如图1所示。
开发板的射频模块使用有效工作范围为433 MHz/868 MHz/915 MHz开放的ISM频段,利用nRF905芯片自身内部集成的频率调制器,调制不同家居的工作指令,利用芯片自身带有解调器的接收器接收不同控制指令的频率[6]。使用功率放大器实现同指令控制不同功率的家居设备,防止因功率转换不当,导致安全事故的发生。利用调节器收发控制指令的32 B数据,调整发射速率为50 Kb/s,外置一个433 MHz天線。
控制开发板内设置一个S003nRF905无线数传模块,调节数传模块的工作频率范围在422.4~473.5 MHz之间,内置512个通信频道满足多点通信、调频分组控制方式[7]。使用SMA接口连接外置天线,增强控制信号的发送接收功能,连接图如图2所示。
系统硬件的芯片STM32和nRF905以及家电设备组成了设备节点,射频与STM32经过I/O口相连,模拟出SPI总线连接方式的稳定效果。控制开发板设计完毕后,设计主控电路,实现线路主控功能[8]。
1.2 设计主控电路
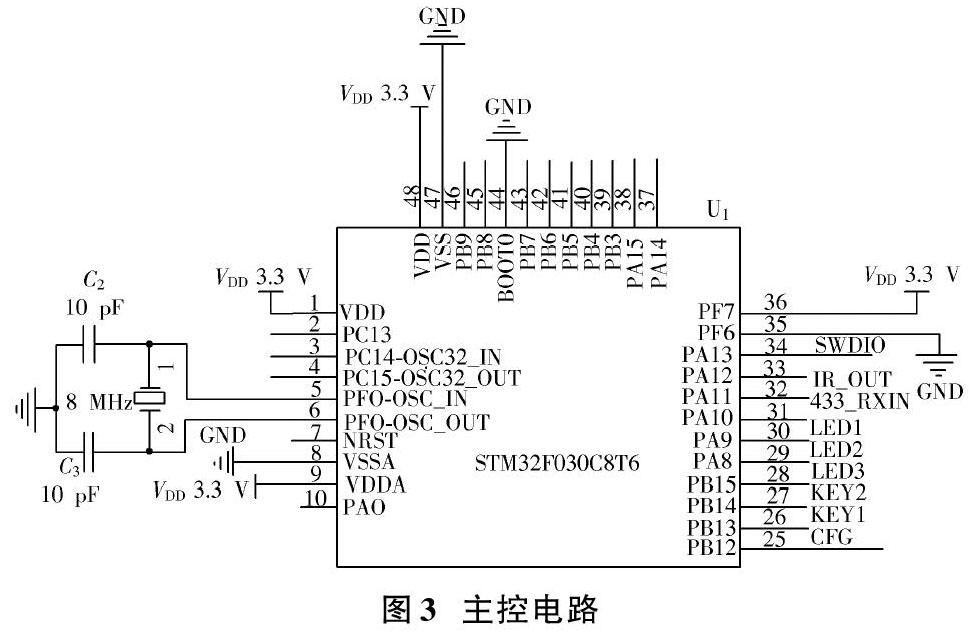
按照不同家居功能设计主控电路时,重新定义单片机的引脚功能,将晶振电路的总线位与芯片位置于同一层,并使用“地”网络包围,避免晶振下面铺地[9]。在每个电源管脚处接入一个0.1 μF的去耦陶瓷电容,消除I/O口开关切换产生的高频噪声。在单片机每对VCC和GND管脚上放置一个短引线电容,内部集成64 KB ROM和8 KB RAM。最终的晶振电路、复位电路以及电源去耦电路如图3所示。
由图3可知,将晶振电路尽量靠近芯片管脚,采用包地敷铜的连接方式,消除高频噪声,完成硬件部分的设计[10]。
2 控制系统软件设计
2.1 计算控制指令数据损失量
计算控制指令数据损失量,使用神经网络层处理控制系统中不同的家居单元[11]。将控制系统控制的一个种类的家居单元看作一个神经网络的处理单元,设此时的家居处理单元为[Xi],连接的权值为[Wi],此时的内部处理阈值为[θ],此时处理单元的输入方式为:
式中:[Xi]表示第[i]个参数输入值;[Wi]表示此次控制家居单元和接下来控制第[i]个处理单元的连接权值;[f]表示应用函数或是激活函数;[θ]表示隐含控制层神经节点的阈值。为了降低系统在日常过程中的损耗,设[hθ(x)]为假设函数,[x]为激励参数,[y]为响应参数,则损失函数为:
调用控制系统的PC端应用接口函数*SIGet NumDevices(),将式(3)计算出的控制指令损失数值调整为0,避免控制指令数据在传输过程中损失量过高[12]。计算出控制指令的损失量后,利用Java编程,将控制系统中的控制指令编程录入系统。
2.2 Java编程控制指令
使用Java编程控制指令时,设置请求帧的格式,定义传输数据码结构,利用运行传输代码:
??packed typedef struct{
u8 Count_433;// TX Time 433 ad time 433[NODE_ CNT];//
}STO R_33_DATA//?packed typedef struct{
u8 addr 433[2];//
else if(((temp_I*8/3) 支持运行双目视觉的控制摄像机,并传输数据至芯片的中心数据处理模块中[13]。使用约束代码: about 8266_ send cmd {"AT+CWMODE=3","OK") } while(about 8266 send_cmd {"AT+CIFSR","APIP ",});// temperature=wendu shi+0x30;0] 11) =wendu ge+0x30r...L F...L humidity }0}=shidu_ shi+0x30; 实现规定控制板远程控制屋内湿度要求,并根据土壤湿度,设定室内植物浇灌的周期时间[14]。利用循环代码: for(j=O;j { Receive[j]=Receive[j]<<1; // if(((temp_ l/3) else if(((temp_I*8/3) 用来运行室内煤气监测机制。综合3种控制指令,完成控制系统的软件设计[15]。 3 实 验 3.1 实验准备 实验准备安装在室内的传感器,详细参数见表1。 准备实验控制系统控制的智能家居环境如图4所示。 分别使用2种传统控制系统与基于双目视觉的无障碍智能家居控制系统对图4中的控制环境进行实验,对比3种控制系统可以控制家居环境的控制范围。 3.2 实验结果分析 规定3种控制系统实验时所用图4实验环境长宽高的面积为20 m×10 m×6 m,将图4实验环境转换为三维立体坐标系。3种控制系统最终的控制范围见图5。 由以上3种实验结果显示,将图4控制的家居环境变换成为三维坐标系,传统控制系统1最终控制的长度控制范围为0~8 m,宽度控制范围为0~8 m,高度控制范围为0~3.5 m;传统控制系统2最终长度控制范围为0~14 m,宽度控制范围为0~9 m,高度控制范围为0~5 m;而基于双目视觉的无障碍智能家居控制系统的长度控制范围为0~20 m,宽度控制范围为0~10 m,高度控制范围为0~5.5 m,可监控范围更大,更适合在实际智能家居中使用。 4 结 语 随着人们对家居的要求逐步向安全舒适的高品位追求发展,将双目视觉技术应用于无障碍智能家居控制系统,成为热门研究的方向。本文通过设计控制系统相关软硬件,完善系统控制电路,计算数据损失量,编程控制指令,针对传统控制系统的不足,改进传统控制系统控制范围小的问题,增加控制系统的实用性,进一步提升用户的体验。 注:本文通讯作者为袁傲冰。 参考文献 [1] 高丽英.融合网联车辆的智能家居协同监控系统[J].电子技术应用,2018,44(1):60?64. [2] 肖丁,王乾宇,蔡铭,等.智能家居场景联动中基于知识图谱的隐式冲突检测方法研究[J].计算机学报,2019,42(6):1190?1204. [3] 黄鹏程,杨波,万新军,等.基于双目视觉的多点三维振动测量系统[J].光学技术,2018,44(4):448?452. [4] 郭子兴,张晓林,高岩.基于双目视觉的增强现实系统设计与实现[J].电子设计工程,2018,26(23):1?6. [5] 黄一凡,杨建业,戚国庆.基于二自由度转台的双目视觉跟踪技术研究[J].电子设计工程,2018,26(14):181?185. [6] 严亮,舒志兵,李照.基于SURF+RANSAC的双目立体视觉目标识别与抓取[J].机床与液压,2019,47(9):76?80. [7] 赵江涛,顾季源,张东亮,等.海洋观测浮标摇摆姿态视频测量方法及试验分析[J].电子设计工程,2019,27(15):179?183. [8] 邱佳楷,王然风,付翔.重介质悬浮液密度宽域智能控制系统设计[J].工矿自动化,2019,45(7):33?37. [9] 荀艳丽,焦库,张秦菲.基于物联网技术的智能停车系统设计与实现[J].电子设计工程,2019,27(3):59?62. [10] 刘东波,陈玉娟,黄勇成.核电厂数字化仪表控制系统智能设备接口设计[J].核科学与工程,2019,39(3):485?491. [11] 武书彦,朱坤华,王辉,等.人工智能系统设计在园艺栽培生产中的运用[J].农机化研究,2018,40(2):216?220. [12] 张景璐,王琳娜,赵妍.一种激光传感器在智能控制中的设计与应用[J].激光杂志,2018,39(10):160?164. [13] 黄莹,卢秉恒,赵万华.云计算在智能机床控制体系中的应用探析[J].机械工程学报,2018,54(8):210?216. [14] 李亚勇,蔡英鳳,陈龙,等.考虑前后方车辆行驶状态的ACC系统控制方法[J].汽车工程,2019,41(8):865?871. [15] 古磊,竺小松.有源相控“智能蒙皮”波束控制系统的设计与实现[J].火力与指挥控制,2018,43(4):152?157.
