脉冲串信号时差估计优化算法*
2020-09-23李世豪
李世豪,王 建
(中国船舶重工集团第七二四研究所,南京 211106)
0 引言
无源定位系统[1]是利用目标辐射的电磁信号对其进行定位,具有隐蔽性好,抗干扰能力强,作用距离远的特点[2]。在多基站无源定位系统中,由于目标与不同基站侦收天线之间距离不同,使得各个基站接收到的同一个目标辐射源脉冲信号存在时间差,利用多基站接收到的信号脉冲到达时间差,可以实现对目标的定位。这种独特的目标定位方式引起了世界各国对无源定位技术的重视,并于20世纪60 年代开始对其进行深入研究。目前国外已有地对空辐射源、空对地辐射源、舰对空辐射源、以及舰对舰辐射源的多目标无源探测定位系统[3],其中,美国研制的反预警机远程无源定位系统与德国研制的三边/ 三角混合定位系统已经取得了显著的效果。国内方面早期有信息产业部51 所研制的“910-I”系统,该系统利用测时差与测向定位相结合,共享通道,对各种体制下的信号实现精确定位[5]。
本文将研究无源定位系统中的信号到达时间差测量问题,讨论目标信号为脉冲串序列信号的情况,通过利用整个脉冲串序列中各个脉冲的到达时间信息来确定整个脉冲串的到达时间差,以显著减小测量误差对整个定位系统性能的影响。
1 脉冲信号到达时间差的测量方法及误差分析
常用的多站侦收信号脉冲前沿到达时间差测量方法[5-6]主要分为3 类。
1)标准脉冲前沿比较法:各站先将侦收到的信号转换成标准脉冲,再将标准信号送到中心站进行信号脉冲前沿时间比对,求出时间差。
2)各站采用相互严格精确同步的时钟对待测信号脉冲分别进行达到时间测量,再送到中心站进行到达时间比对,求出时间差。
3)采用宽带信号传送设备,将各站侦收的信号一起送到中心站,然后进行两两相关处理,求出时间差。
其中方法1 和方法2 的时差测量方式需要对各站时钟进行同步校准,以保证对脉冲信号前沿到达时间的比对精度;方法3 则要对宽带信号传送通道的时延进行精确校准,以减小时间相关处理误差。
采用上述3 种方法进行时间差测量时,影响测量精度的主要因素[7]包括:时间同步误差、采样量化误差、信号幅度不一致误差、信噪比等。其中,时间同步误差来源于各站进行时间基准同步的过程中,无法完全消除同步误差,此时间误差一般可限制在5 ns 以内;采样量化误差则是由于采样时钟精度有限,量化时钟的计数脉冲沿不能与待测脉冲前沿完全同步而引入的时间误差;当各站侦收到的信号幅度不一致时,幅度大的信号越过检测门限的时间早,进而引入了时间误差;信号在发射传输和接收过程中存在噪声干扰,使得在测量信号到达时间时引入随机误差。
由于上述测量误差的存在导致脉冲信号到达两个侦收基站的上述时间差发生变化,影响了目标的定位准确性。通过对同一目标辐射信号的多个脉冲到达时间进行统计分析,将显著减小每个脉冲到达时间测量误差对目标定位精度的影响。
2 脉冲串最小二乘时差估计算法
2.1 原理
由时差定位原理可知,目标点的确定取决于目标到各个基站的到达时间差。传统方法[8-9]中,采用单个脉冲到达时间差对目标进行定位,由于测量过程中产生测量误差不可避免,严重影响了目标的定位精度。本文主要考察脉冲串序列信号的定位,可以通过利用整个脉冲串序列中各个同步脉冲信息来确定整个脉冲串的到达时间差,以此减小测量脉冲到达时间时产生的误差[10-11],从而减小对定位精度的影响,具体方法如下:



2.2 不同条件下仿真结果
假设基站接收到的同步脉冲串如图1 所示:

图1 标准脉宽为0.5 us 的标准脉冲串序列
其中脉冲串包括4 个同步脉冲,每个脉冲的脉宽为0.5 us,相邻脉冲间隔为1.5 us(1 us=100 长度单位)。
模拟传输过程中及接收测量时产生脉宽测量误差,最大误差为8%(相对于脉冲的脉宽宽度),即0.04 us,进行幅度归一化后对到达时间差分析,以脉冲到达前沿作为测量时间差基准点。未优化前,传统方式下以第1 个脉冲的到达时间作为整个脉冲串的到达时间点;经过优化后,以对整个脉冲串的脉冲到达时间进行处理后得到的时刻t 作为整个脉冲串的到达时间点。
考虑在SNR 固定为30 dB 的条件下,对两基站接收脉冲串实际到达时间差为0.5 us~1.5 us 时的测量到达时间差以及误差影响,进行1 000 次蒙特卡洛仿真。
分析:由仿真图2 与图3 对比可知,脉冲串测量到达时间差经过优化后,误差显著减小,且实际到达时间差的变化对误差的影响较小,优化后测量脉宽带来的误差在1 ns 以下,较优化前的20 ns 误差,系统性能提升明显。

图2 传统方式下实际时间差与测量到达时间差关系

图3 优化后实际时间差与测量到达时间差的关系
考虑在两基站接收脉冲串实际到达时间差为1 us 条件下,对SNR 为15 dB~45 dB 时的测量到达时间差影响以及误差影响,进行1 000 次蒙特卡洛仿真实验。
分析:由仿真图5 可知,经过优化后,在SNR 小于19 dB 时,测量到达时间差误差较大,对系统性能的影响较为显著;而SNR 大于19 dB 后,测量误差相对稳定,系统的性能也逐渐稳定。对比图4 与图5,同样可以得出在经过优化之后的时差测量误差要明显优于传统未经过优化的测量误差,提升性能在一个数量级左右。

图4 传统方式下SNR 与测量到达时间差的关系
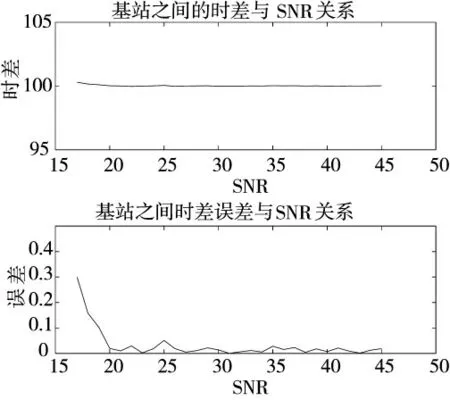
图5 优化后SNR 与测量到达时间差的关系
2.3 小结
对于同一个脉冲串信号,经过优化后,在不同的SNR 以及实际到达时间差时的测量误差都要小于优化前的测量误差,且优化后两个基站在SNR 超过18 dB 的情况下接收时,SNR 变化对系统的影响较小;脉冲串的实际到达时间差对脉冲测量误差的影响也显著降低。
3 缺损脉冲序列相似性配准时差估计算法
3.1 相似置信度评价函数


其中,a(k),b(k)为A 基站与B 基站接收到的k 脉冲的特征参数。再计算整个脉冲串的相似置信度μ,
其中,N 为脉冲串中脉冲个数。
3.2 序列相似性配准估计算法原理
A 基站与B 基站接收到脉冲串中各个脉冲的到达时间即为特征参数,假设A 基站先接收到脉冲串。
记

则上述问题可转化为考察序列M 与序列N 的相似度问题,搜索一个使得两序列相似置信度最高的,即为脉冲到达时间差。
其中,

具体方法:

其中,α 一般取0.5。令xk=,更新下一个值。式(6)中的y 即为相似置信度μ。再带入式(3)中,获得新的脉冲串相似置信度,与之前的μ 值比较,保留相似置信度高的那个μ 值,如此一直重复,直到获得相似置信度最大的μmax值,此时对应的值即为最接近脉冲串真实到达时间差的估计值。
此方法优点在于能够快速地在完全不知道真实脉冲串到达时间差的情况下,获取最接近真实到达时间差的估计值。
基于式(2)、式(3)、式(6),带入到所需解决的定位问题中有:

对f(k)求导有:

再将实际工程中接收到的数值带入即可求得估计到达时间差。
3.3 算法仿真
设置参数如下:假设脉冲串序列有4 个同步脉冲,每个单位长度等于10 ns,具体如图6 所示。
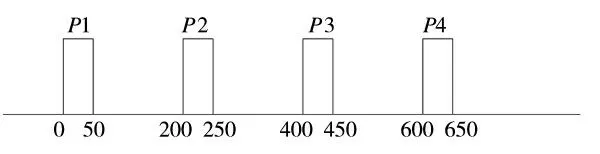
图6 标准脉宽为0.5 us 的标准脉冲串序列

现考虑不同条件下此算法的估计效果,分别在测量偏差服从U[0,4]、U[0,6]、U[0,8]、U[0,10]条件下,以及改变实际到达时间差D=10,15,20,25时,估计到达时间差值如表1 所示。
再考虑接收脉冲串时出现脉冲丢失的情况。在实际到达时间差D=20,测量偏差分别服从U[0,4]、U[0,6]、U[0,8]、U[0,10]条件下,接收脉冲串无丢失、丢失任意一个脉冲以及丢失任意两个脉冲的估计到达时间差值,如表2 所示。假设丢失1 个脉冲时为丢失了第2 个脉冲序列,丢失2 个脉冲时为丢失了第2 个和第4 个脉冲序列,丢失的脉冲序列处对应特征参数取-100。
3.4 小结
由表1 分析可知,当测量偏差较小时,此优化方法效果明显,在偏差服从U[0,4]条件下估计值准确度甚至可以提高一个数量级,随着估计偏差的增大,此算法的优化效果也越来越差,但即使在偏差服从U[0,10]的情况下,估计值精度也能提高40%左右。且此算法的优化精度不会随着实际脉冲串到达时间的变化而发生变化,即D 值大小对估计值精度没有影响。
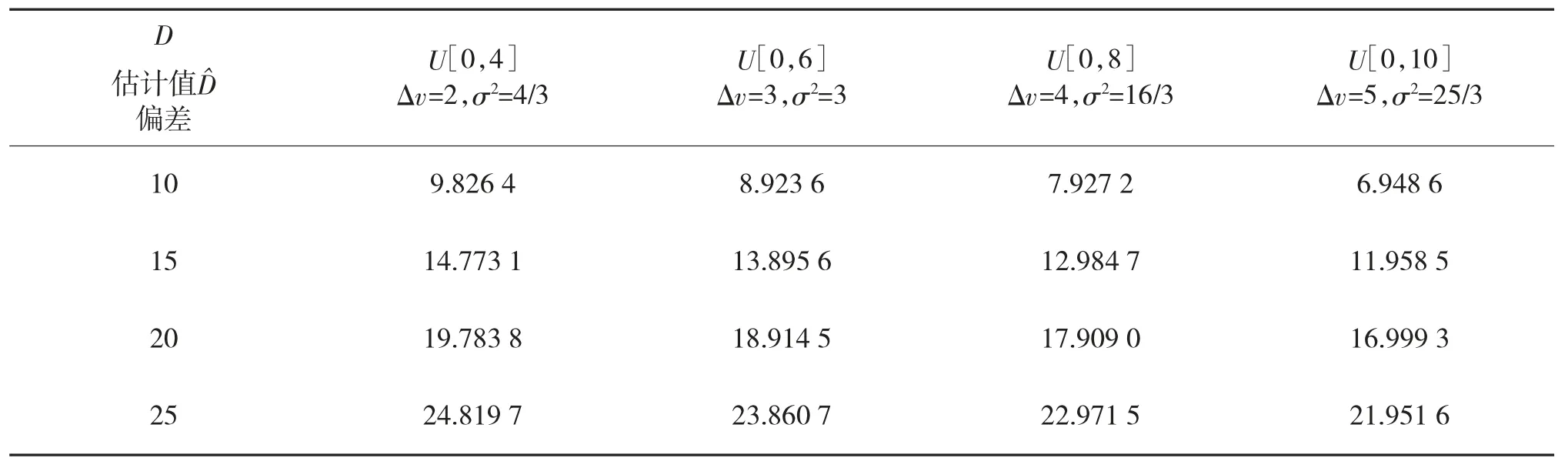
表1 不同测量偏差及时延条件下的到达时间差估计值
由表2 分析可知,当接收到的脉冲串序列发生脉冲丢失情况时,在最多丢失两个脉冲序列的情况下,估计到达时间差精度不会受到脉冲丢失的结果影响。

表2 不同测量偏差及丢失脉冲序列条件下的到达时间差估计值(D=20)
4 时差定位精度仿真及分析
由GDOP 精度公式[15-16]可知,多站时差定位系统的定位精度与基站布站方式、站间距离、站间夹角、站址误差、信号到达时间测量误差等多个因素有关。为了保证定位精度仅受优化前后的到达时间测量误差变化影响,现将其他影响因素固定,做如下仿真。
背景参数设定:假设系统为一个四基站被动雷达定位系统,雷达布站为Y 型布站,站间夹角为30°,站间距离为30 km,站址误差为1 m。主站为原点处,在400*400(km)的范围内进行GDOP 精度仿真。
分析:通过对比图7 与图8 可知,在经过优化之后,由于测量时差误差的减小,系统的GDOP 性能明显提升。以(0,50)点为例,未优化之前的GDOP值为0.5 左右,而经过优化后GDOP 值为0.1 左右,定位精度提升明显,即在保证一定精度的条件下,系统能够作用的距离更远。

图7 未优化前测量时差误差20 ns 时GDOP 精度
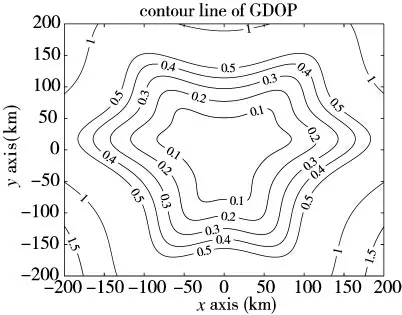
图8 优化后测量时差误差1 ns 时GDOP 精度
5 结论
对于文献[17]中提到的利用相关函数对目标进行处理来获取信号到达时间差的广义相关法和高阶累计量法,首先要有一定的先验知识并对接收到的数据做预处理,且对信噪比要求较高,实际系统环境难以满足。本文提出的两种测量脉冲到达时间差的优化算法,无需附加其他先验条件,仅利用基站接收到的目标辐射源信号即可实现对目标的定位任务。其中脉冲串最小二乘算法通过对比优化测量误差前后的系统在不同条件下的定位性能,考虑了可能影响定位精度的两个因素,即SNR 和脉冲串实际到达时间差。通过MATLAB 仿真实验可知,优化后的系统定位精度对比优化前有明显提升,且适用于各种背景条件。经过优化后,随着SNR 的增大,测量误差先减小,后趋于稳定。脉冲串实际到达时间差增大对测量误差影响不大,稳定在1 ns 左右。这些误差变化趋势与优化前基本相同,只是精度上提升了近一个数量级,说明优化算法对系统定位精度提升有效。
缺损脉冲序列相似性配准算法在测量偏差较小时估计精度高,随着测量偏差的增大而估计精度有所下降,但其优势在于能够应对脉冲串序列部分丢失的情况,且能够在完全不知道真实脉冲串到达时间差的情况下,估计出最接近其真值的估计到达时间差,此算法适合测量偏差较小但存在脉冲序列丢失可能性较大的目标定位任务。故在对一个目标进行定位时,两基站接收到目标辐射源信号后,考虑到序列相似性配准算法需要进行到达时间差估值搜索,将花费一定的时间开销,为提高目标定位的效率,应先采用最小二乘时差估计算法对到达时间差进行估值,若由于存在脉冲丢失严重而使得目标的定位精度无法满足工程指标需求,则再利用序列相似性配准估值算法进行目标定位。
