SR电机对轮毂驱动电动汽车垂向振动的影响
2020-09-19张钱斌
丁 芳,王 波,张钱斌
SR电机对轮毂驱动电动汽车垂向振动的影响
*丁 芳,王 波,张钱斌
(安徽机电职业技术学院汽车与轨道学院,安徽,芜湖 241002)
针对SR电机对轮毂驱动电动汽车行驶平顺性的影响,本文首先建立了开关磁阻(SR)电机的转矩波动方程,并根据电机的矢量控制原理,利用Sim Power System Toolbox模块库,搭建了电机模型;然后利用Matlab/Simulink软件,搭建了基于电机模型的机-电耦合振动仿真模型,并进行受轮毂电机转矩波动干扰的车辆垂向动力学模拟仿真。研究结果表明:附加轮毂电机后,车身振动和车轮动载荷都会变大;说明此类汽车工程化应用之前,需要优化悬架,以适应轮毂电机的转矩波动。
电动汽车;轮毂驱动;开关磁阻电机;振动分析
轮毂电机是指将金属轮毂和驱动装置合为一体的驱动电机,也就是说,它将驱动装置、传动装置以及制动装置一起合并到轮毂中,俗称“电动轮”,也叫作轮式电机[1],其内部包含了轴承、定子和转子、小型逆变器等。电动汽车采用轮毂电机驱动,对驱动电机的尺寸、结构和性能等方面的要求会更高[2]。首先,驱动电机须密度更高、质量更轻;同时为节省车内空间、降低整车负载,要求驱动电机的功率密度和转矩密度较高[3]。其次,车辆行驶时要经过变速、停车、爬坡起动等多种复杂工况,要求电机还应具有调速范围广、动态响应快、可控性高的特点[4]。根据上述要求,结合各种现有电机的启动性能、额定运行点峰值效率、恒功率速度范围等方面考虑,优先选用开关磁阻电机(Switched Reluctance Motor,SRM)作为电动汽车的轮毂驱动电机[5]。因此,本文选择轮毂驱动电动汽车作为研究对象,并仿真分析开关磁阻电机转矩波动对其垂向振动的影响,以论证轮毂驱动电动汽车工程化应用的可行性。
1 SR电机转矩波动动力学模型
SR电机的内部主要结构为定子和转子,定子和转子都有铁芯,铁芯所用材料均为硅钢片。在定子铁芯的内表面和转子铁芯的外表面都均匀分布有凸齿(也称凸极)和凹槽,因此也称为双凸极结构[6]。定子铁芯上的每一个凸极均分布有集中绕组,每一相绕组分布在处于径向相对位置的两个凸极上,构成一对磁极。SR电机的定子和转子极数可以有很多种搭配,电机也可以根据定子铁芯上的绕组数目不同构成不同相数,且单相和两相的SR电机不能够自启动,只有三相及以上的SR电机具备自启动功能[7]。常见的有以下几种形式:6/4极,8/6极,10/8极,分别为三相、四相、五相电机。对于有自启动、四象限运行要求的驱动场合,应优先选择表1中所示的定子和转子磁极数目组合方案。

表1 常见定、转子极数组合方案
对表中的组合方案进行分析,可得到如下结论:定子绕组的相数越多,转子每转动一次的步距角越小,可以减少转矩的脉动;但相数越多,SR电机主开关器件数量也会增多,结构也更复杂,增加了制造成本[8]。综合这两点,定、转子极数组合方案为8/6极的四相SR电机应用较多。图1是8/6极结构的四相SR电机的结构及电路图,为了简洁,图中只画出定子绕组及绕组供电的电路简图。

图1 四相电机的结构及电路简图
由于电路具有开关特性,磁路具有磁饱和性和非线性特点,需将电机内的磁场能量转化为机械能的部分能量(称为磁共能)采取分段线性化[9-10],也可将电机内的电感进行分段线性化,为此,经简化后的电磁转矩表达式为

式中,为电机绕组中电感对位置角的变化率,为电机绕组中的相电流。
SR驱动电机转矩波动的产生,是由于定、转子间的切向作用力和径向作用力导致的结果,因此需要对电机的切向力和径向力进行计算。参照电机实际运行工况,可确立定、转子间切向力与时间之间的关系,如图2所示,数学表达式为

电机定、转子间的径向力,若要对其进行精确解析则非常不易,因为电机磁路具有饱和性和非线性[11]。从定性的分析出发,可作如下假设:①磁路是线性的;②电机径向力集中作用于定子磁极;③电机绕组中相电流为常数。由于定、转子间径向力和切向力的作用周期相同,对其进行简化,可得径向力与时间的关系,如图3所示,数学表达式为

式中,r表示转子半径,b为最短气隙长度,b=R-r;Lmin为绕组最小电感;i为绕组电流。
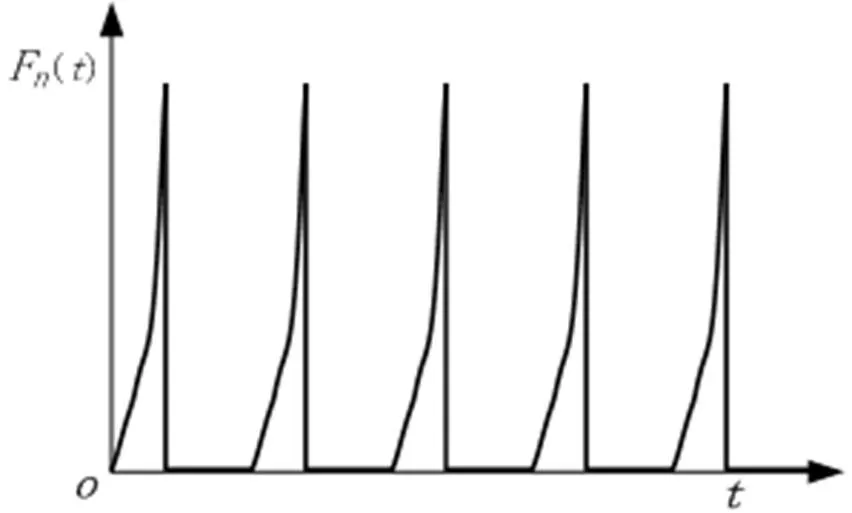
图3 径向力与时间的关系
汽车在行驶过程中,驱动电机一直在运转,因此电机定、转子间的切向力和径向力的方向一直在变化,故需要分析切向力和径向力在垂向的合力。依据力的合成、分解原理,该垂向力的表达式为

上式中,φ是电机转子的初相位。表2中是SR电机的一组参数,为目前应用较多的四相电机。

表2 电机参数
依据式(4),利用Matlab/Simulink软件,建立SR电机垂向激励力模型,如图4所示。选择总时长40 s,时间步长为0.02 s,输出的电机垂向激励力与时间的关系如图5所示,可以看出SR电机转矩波动产生的激励力具有明显的周期性。

图4 SR电机Simulink模型

图5 SR电机垂向激励力与时间关系
2 路面模型的建立



表3 各级路面谱密度

图6 B级路面不平度模拟(车速为50 km/h)
3 电机转矩波动干扰下的机-电耦合模型
图7为本文建立的附加轮毂电机的1/4车辆垂向振动动力学模型。
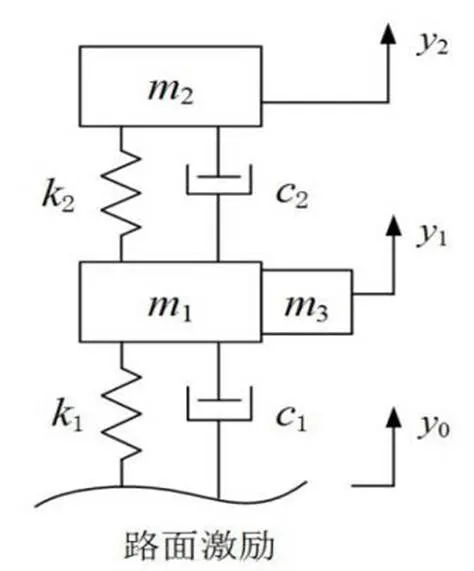
图7 1/4车辆垂向振动动力学模型
根据图7,可得到车辆垂向振动动力学微分方程:




外转子轮毂电机不设减速器,行驶过程中电机产生的转矩波动直接作用于轮毂及车轮[13]。根据式(5)~(8),在MATLAB/SIMULINK中建立图7的仿真模型,如图8所示,该模型包括的三个模块如下:1/4车辆垂向振动模块、路面激励模块以及轮毂电机模块。表4中列举的是图8所示仿真模型中具体的参数值。
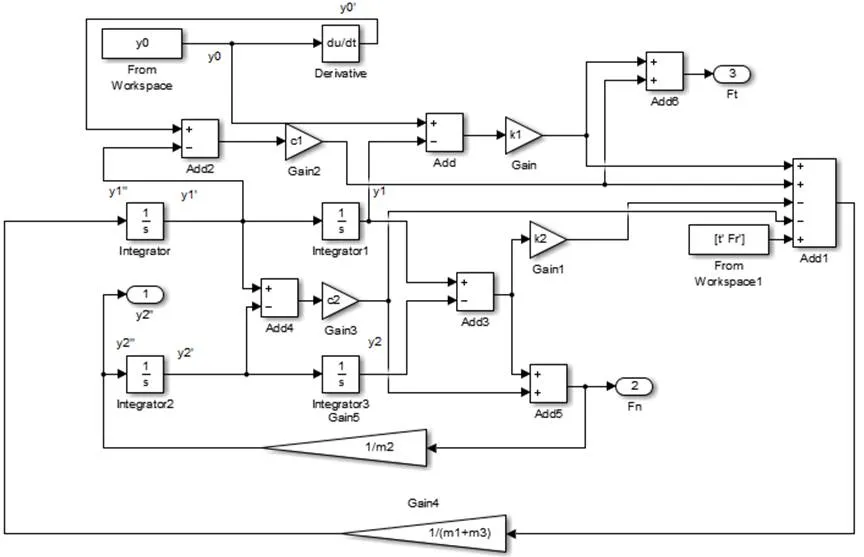
图8 附加轮毂电机的1/4车辆垂向振动Simulink仿真模型

表4 仿真参数
4 仿真分析
基于图8仿真模型,开展了附加电机激励和不加电机激励的汽车垂向振动对比分析,如图9~10所示。
4.1 车身加速度对比分析

图9 不加电机的车身加速度的时域和频域图
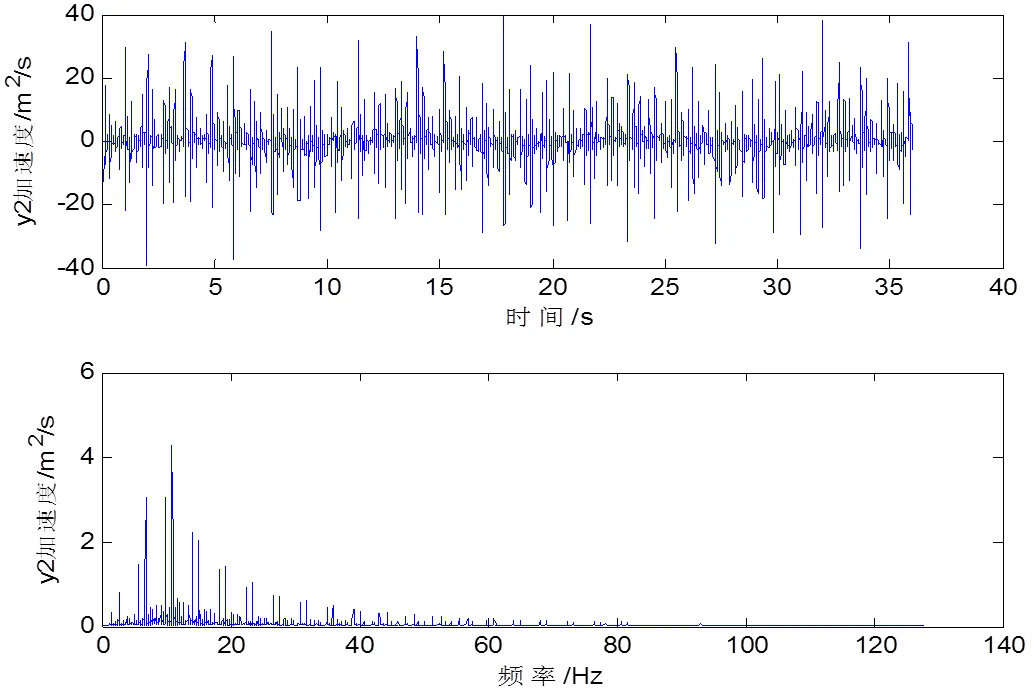
图10 加入SR电机车身加速度的时域和频域图
4.2 车轮动载荷对比分析
图11 不加电机时的车轮动载荷时域和频域图

图12 加入SR电机是的车轮动载荷时域和频域图
根据图12,加上电机后,车轮动载荷变化很大,从仿真结果看,主要在-12000 ~12000 N范围内变化,最大值甚至达到-17000 N,可以看出轮毂电机对的影响很大;从频谱图上看,加入SR电机后车轮动载荷随频率变化,0~10 Hz,逐渐增大,最大达到17000 N;10~40 Hz,逐渐减小;频率大于40 Hz后,基本上不受其影响。
5 结论
基于以上分析,可知:
1) 汽车车身振动和车轮的动载荷很大程度上受SR电机的转矩波动影响,也即对汽车乘坐舒适性有一定影响,影响乘员乘坐的舒适感;恶化了轮胎的抓地性,不利于汽车驱动和行驶安全性。因此,研究轮毂驱动电动车的垂向动力学及机-电耦合振动机理的抑制方法具有紧迫性。
2) 说明此类电动汽车产业化之前,需采取措施,改进悬架结构或者优化参数或创新设计相关机构或进一步研究电机的转矩控制问题,以提高轮毂驱动电动汽车的行驶平顺性、安全性。
[1] 郑淑琴,龙江启. 电动汽车永磁无刷轮毂电机控制策略建模[J].中国机械工程,2017,28(6):744-749,755.
[2] 肖强. 电动汽车轮毂电机电磁设计与电磁振动分析研究[D]. 南昌:华东交通大学,2019.
[3] 李耀华,马建,刘晶郁,等. 电动汽车用永磁同步电机驱动系统控制策略比较研究[J]. 汽车工程,2013,35(5):412-417.
[4] Zhang Lipeng, Zhang Silong, Zhang Wei. Multi- objective optimization design of in-wheel motors drive electric vehicle suspensions for improving handling stability. Proceedings of the Institution of Mechanical Engineers, 2019, 233 (8):2232-2245.
[5] 邵凯,汪若尘,孟祥鹏,等.轮毂驱动电动车的电磁混合悬架控制研究[J].重庆理工大学学报:自然科学,2018,32(6):26-33,174.
[6] 汪若尘,俞峰,邵凯等.集成电磁悬架的轮毂驱动电动车垂向振动抑制方法研究[J].农业机械学报,2018,49(7):382-389.
[7] 李哲,郑玲,胡一明,等.轮毂驱动电动汽车振动负效应及抑制方法[J].重庆大学学报,2019,42(2):20-29.
[8] 童炜,侯之超.轮毂驱动电动汽车垂向特性与电机振动分析[J].汽车工程,2014,36(4):398-403,425.
[9] 祁新梅,郑寿森,付青.电动汽车后轮轮毂电机驱动的操纵控制[J].中山大学学报:自然科学版,2019,58(1):83-90.
[10] 郑阳,陈勇,赵理.轮毂电机驱动电动汽车平顺性控制仿真[J].计算机仿真,2018,35(6):159-166.
[11] 张利鹏,李亮,祁炳楠.轮毂电机驱动电动汽车侧倾稳定性解耦控制[J].机械工程学报,2017,53(16):94-104.
[12] 余志生,夏群生.汽车理论[M].北京:机械工业出版社,2012.
[13] 张海涛,王云霞,胡新林.汽车主动悬架系统控制器的设计与仿真研究[J].井冈山大学学报:自然科学版, 2016,37(4):7-62.
Effect of SR motor on vertical vibration of in-wheel motor drive electric vehicle
*DING Fang,WANG Bo,ZHANG qian-bin
(Collede of Automobile and Rail, Anhui Technical College of Mechanical and Electrical Engineering,Wuhu, Anhui 241002, China)
In order to study the influence of SR motor on the ride comfort of hub drive electric vehicle, in this paper, firstly, the torque fluctuation equation of switched reluctance (SR) motor is established, and according to the vector control principle of motor, the motor simulation model is built by Sim Power System Toolbox, then using MATLAB/Simulink software, the mechanical-electrical coupling vibration simulation model is built based on the motor model, and the vertical dynamic simulation of the vehicle disturbed by the wheel motor torque fluctuation is carried out. The results show that the vibration of the body and the dynamic load of the wheel will increase after the wheel hub motor is added, which indicates that the suspension needs to be optimized to adapt to the torque fluctuation of the wheel hub motor before the application of this kind of automobile.
electric vehicle;hub drive;switched reluctance motor;vibration analysis
TP 276
A
10.3969/j.issn.1674-8085.2020.04.014
1674-8085(2020)04-0071-06
2020-05-07;
2020-05-13
安徽高校自然科学研究项目(KJ2019A1154);安徽省省级高水平专业(2018ylzy187);安徽省省级教学创新团队(2019cxtd087)
*丁 芳(1986-),女,安徽芜湖人,讲师,硕士,主要从事汽车振动分析、新能源汽车研究(E-mail:ahjd2659@163.com);
王 波(1980-),女,安徽芜湖人,副教授,硕士,主要从事新能源汽车技术研究(E-mail:ahjdwbo@126.com);
张钱斌(1980-),男,安徽芜湖人,副教授,硕士,主要从事轮毂驱动电机研究(E-mail:ahjdzqb@ahcme.edu.cn).
