耦合故障转子系统SFD参数多目标优化
2020-09-15张桂昌
马 梁 ,王 俊 ,鲁 鑫 ,张桂昌
(1.中国民航大学航空工程学院,天津 300300;2.天津大学内燃机燃烧学国家重点实验室,天津 300072;3.天津大学仁爱学院,天津 301636)
1 引言
目前在航空发动机转子系统中,基于油膜阻尼技术而设计的SFD被广泛应用,关于研究SFD对转子系统动力学特性的影响一直是航空发动机转子振动领域的热点问题[1]。
文献[2]为SFD的力学模型建立与减振机理做了巨大贡献,并研究了对刚性转子系统的影响规律,所得结果均得到了实验验证;文献[3]将SFD应用于Conway发动机上,使系统的振动幅值减小60%,为SFD在工程应用中的广泛使用奠定基础。文献[4]针对Jeffcott转子系统开展研究,对SFD减振机理、振动特性及系统受突加不平衡影响进行了一系列理论与实验分析,得到系统在振动幅值最小的同时其传递率的较优参数组合。此时SFD的参数选择主要依赖于经验设计并且比较孤立,主要集中在自身减振性能的体现。文献[5]引入遗传算法对系统在临界转速工况下进行了优化分析,选择合理设计参数,使系统工作转速尽可能远离临界转速。可以发现,并非任意参数下的SFD都能起到提高转子系统的稳定性和减振作用,SFD的参数设计合理与否至关重要。SFD工作参数往往不能随工况变化而实时改变,而对于突发故障的高速转子系统,这些既定工作参数下的SFD表现出一定的不适应性,无法达到预期的有效减振效果。为提高SFD减振工作范围,并能够胜任转子系统发生故障后的复杂减振任务,需要对正常状态下的SFD设计参数进行修正,给出更加合理的参数选择方案。
建立了SFD作用下不对中-碰摩耦合故障转子系统动力系模型。以无故障、不对中故障及不对中-碰摩耦合故障转子系统振动幅值为优化目标,对SFD工作参数进行多目标优化设计,实现了典型故障转子系统的减振任务。
2 基础理论
2.1 转子系统建模
所研究转子系统主体示意图,如图1所示。由于空间所限,系统两端采用深沟球轴承结合挤压油膜阻尼器形式进行支承,并通过花键联轴器形式将系统联接。将转子系统离散为多点等效集中质量,根据论文前期工作建立系统动力学微分方程并确定工作参数[6]:

图1 系统简化模型Fig.1 The Simplified Model of Rotor System


系统综合考虑各类外力施加情况。包括:滚动轴承支反力、圆盘偏心力、碰摩故障力、花键联轴器不对中故障啮合力以及挤压油膜阻尼器的作用反力。
将无量纲变换引入求解微分方程,式(1)变换为:

2.2 碰摩故障力
转子与定子发生碰摩现象时须遵守库仑定律。定义e为转子圆盘与机匣的径向相对位移,表达式为,δ为静止时转子圆盘外圈与机匣内圈之间的间隙。当e<δ时,没有碰摩现象;当e≥δ时,碰摩发生,法向力FN与切向摩擦力FT可表示为[7]:

式中:ks—碰摩刚度;f—摩擦系数。
2.3 不对中故障力
首先依据花键联轴器结构形式、尺寸参数及材料属性等确定各键等效啮合距离Li和刚度KLi,并考虑各键受力变形时所产生的扭转位移φ,可得到单个键受扭转作用时的啮合力公式为:

式中:T—花键联轴器所受扭矩;z—键数;R—键根圆半径。
由于联轴器在工作状态下不仅受扭转作用,还存在动态径向位移e′,可得到此时所产生的啮合力为:

式中:φi—各键与X轴正向夹角。
通过综合考虑扭转作用及动态位移所推导的联轴器啮合力模型,可得由于联轴器不对中故障产生的啮合力在X、Y向合力为:
2.4 SFD油膜力模型
根据流体动压润滑理论可求得SFD油膜压力分布,其瞬态雷诺方程为:

式中:p—油膜压力分布;Rs—阻尼器半径;μs—滑油粘度;h—油膜厚度;z—轴颈的轴向位移;Ω—轴颈的进动角速度。
基于短轴承假设推导油膜支反力在X-Y方向分力:
2.5 滚动轴承作用力模型
假设滚球与滚道之间为纯滚动。滚动轴承受不平衡力作用而引起强迫振动,并且滚动轴承刚度具有周期性变化特点,从而产生参数激振现象,又称VC振动(Varying compliance vibration)。
基于Hertz弹性接触理论,可得滚动轴承作用力表达式:


式中:Fbx、Fby—X、Y 方向轴承支反力;n—滚球个数;θi可定义滚球角度位置;μ—轴承间隙;Cb—Hertz接触刚度;α—接触角;ωcage—保持架公转角速度;Ri、Ro—内外圈滚道半径;H(·)—亥维赛函数。
2.6 带精英策略的非支配排序遗传算法(NSGA-II)
根据最优拉丁超立方设计选取SFD各参数设计矩阵表,利用响应面法获取输入和输出参数的比较精确的逼近函数关系,并采用带精英策略的非支配排序遗传算法(NSGA-II)对系统进行优化。其中NSGA-II是在第一代NSGA基础上改进而来,其主要流程如下,如图2所示。
(1)将初始随机种群P0与新产生种群Q0合并可获得种群R0;
(2)将种群Rt非劣排序;
(3)进一步将非劣前段进行拥挤距离排序,组成新种群Pt+1;
(4)通过复制、变形及交叉建立种群Qt+1,满足条件即可完成,否则将重新进入流程(2)。

图2 NSGA-II主要流程Fig.2 The Main Process of NSGA-II
3 多目标SFD参数优化
3.1 SFD参数设计

图3 挤压油膜阻尼器控制装置Fig.3 Control Device of SFD

表1 SFD参数变量Tab.1 Structure Variable of SFD Scheme

表2 部分SFD各参数设计矩阵表Tab.2 Part of SFD Parameters Design Matrix Table
根据上述试验设计矩阵中的SFD优化参数,选取转子典型工况(转速ω=1000 rad/s),分别建立无故障、不对中故障以及不对中-碰摩耦合故障三种状态下SFD-转子-滚动轴承系统动力学模型,采用Matlab进行数值计算,从计算结果中提取系统响应频率的幅值。
3.2 无故障转子系统单目标参数优化结果分析
无故障状态下系统响应特征图,如图4所示。由图可知,频谱图主要表现为由不平衡偏心质量引起的基频振动,Poincaré图表现为孤立的一点,系统做单周期运动。
由于无故障状态下系统振动能量主要集中在1倍频成分,因此优化目标函数为系统响应1倍频幅值最小。

图4 无故障下系统响应特征图Fig.4 Characteristic Diagram of System Response with no Fault
无故障下采用最优拉丁超立方法选取的10组设计参数的计算结果和RBF所得近似模型预测结果对比图,如图5所示。由于系统响应主要以转速所引起系统基频振动为主,可得1倍频幅值平均误差值为0.9%,最大误差值为2.7%。近似模型输出变量的误差都能控制在10%以内,说明该近似模型有较高的精确度,可以用该近似模型进行无故障下转子系统的SFD参数优化。
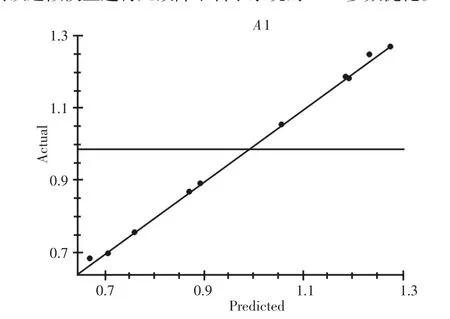
图5 无故障系统计算结果与近似模型预测结果对比Fig.5 Results Contrast between Calculated and Approximate Model with no Fault
运用序列二次规划法(NLPQL)进行无故障下转子系统SFD参数优化,其中目标函数为:系统响应1倍频幅值最小。据此确定SFD 设计参数最优解为:CS=4×10-5;Ka=8008000;μs=0.038。
根据该设计参数重新对无故障下SFD-转子系统进行数值仿真,得到系统动力学响应频谱图,如图6所示。并与优化前频谱图4(a)进行对比。可以看出,优化后,系统动力学响应1倍频幅值由0.8913减小到0.6858,幅值减小约23%。
图6 无故障系统SFD优化后频谱图Fig.6 Spectrum Diagram of SFD Optimized System with no Fault
3.3 不对中故障下转子系统多目标参数优化结果分析
采用上一节无故障下转子系统SFD优化参数作为本节不对中故障下转子系统SFD初始计算参数,分析不对中故障下转子系统动力学特性,其中不对中量e0=3×10-4mm。
不对中故障下系统响应特征图,如图7所示。由图7(a)可知,不对中故障使系统产生2倍、3倍等高倍频成分且使滚动轴承的VC振动增大,频谱图主要表现为1、2及3倍频。这里计算结果与文献[9]吻合。由图7(b)可知,其Poincaré图表现为封闭的圆环,系统做拟周期运动。
对各波浪要素下的进入航道的沙量进行加权平均后得到两个方案沿航道年回淤厚度(图4)。绿线为方案1,紫线为方案2,最大淤积厚度均出现在防波堤前沿。从年均回淤厚度结果来看,方案1大于方案2,且最大淤厚位置靠近河口,最大淤厚为1.86m/yr。方案2与方案1相比,最大淤厚位置更靠近外海,最大淤厚为2.69m/yr。平均淤厚为0.46m/yr(方案1)和0.33m/yr(方案2)。全航道由于底沙推运造成的回淤量分别为248.53和172.25万立方米。
由于不对中故障下系统振动能量主要集中在1、2及3倍频成分,且各频率成分间相互独立,因此优化目标函数为系统响应1、2、3倍频幅值最小。不对中故障下采用最优拉丁超立方法选取的10组设计参数的计算结果和RBF所得近似模型预测结果对比图,如图8所示。其中1倍频平均误差为1.2%,最大误差为6.8%;2倍频平均误差为1.8%,最大误差为8.4%;3倍频平均误差为0.6%,最大误差为2.1%。近似模型输出变量的误差都能控制在10%以内,说明该近似模型有较高的精确度,可以用该近似模型进行不对中故障下转子系统的SFD参数优化。

图7 不对中故障系统响应特征图Fig.7 Characteristic Diagram of System Response with Fault of Misalignment

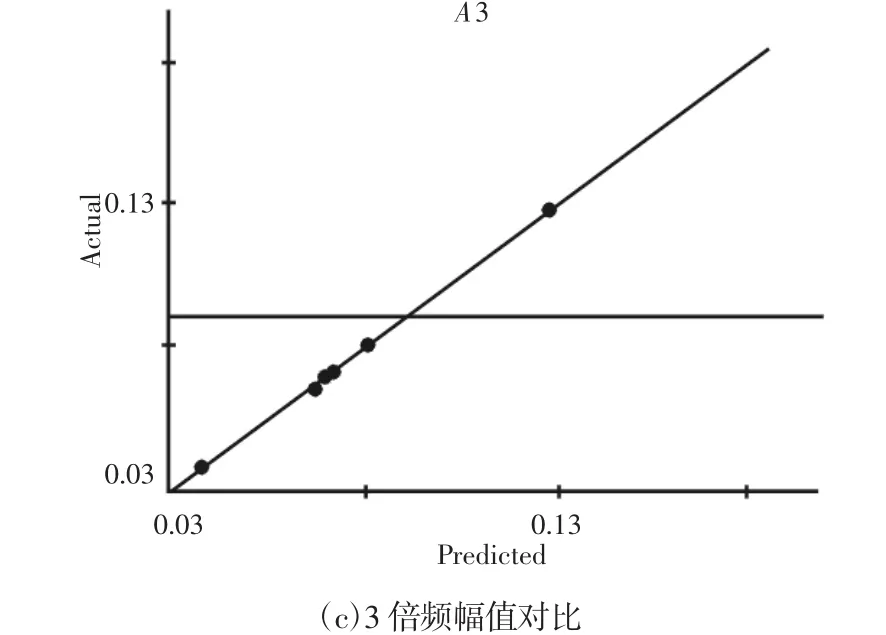
图8 不对中故障系统计算结果与近似模型预测结果对比Fig.8 Results Contrast between Calculated and Approximate Model with Fault of Misalignment
运用NSGA-II进行不对中故障下转子系统SFD参数优化,该算法参数配置如下:种群规模为40;代数为200;交叉率为0.9;交叉分布指数为10;变异分布指数为20。据此确定的SFD最优解为 CS=2×10-4;Ka=6×105;μs=5×10-3。
根据该设计参数重新对不对中故障下SFD-转子系统进行数值仿真,得到系统动力学响应频谱图,如图9所示。并与优化前频谱图7(a)进行对比。可以看出,优化后,系统动力学响应1倍频幅值由0.6916减小到0.3913,幅值减小约43.4%;二倍频幅值由0.0766减小到0.0555,幅值减小约27.5%;三倍频幅值由0.2591减小到0.0863,幅值减小约66.7%。

图9 不对中故障系统SFD优化后频谱图Fig.9 Spectrum Diagram of SFD Optimized System with Fault of Misalignment
3.4 不对中-碰摩耦合故障下转子系统多目标参数优化结果分析
采用上一节不对中故障下转子系统SFD优化参数作为本节不对中故障下转子系统SFD初始计算参数,分析不对中-碰摩耦合故障下转子系统动力学特性。
不对中-碰摩耦合故障下系统响应特征图,如图10所示。由图10(a)可知,系统频谱主要以1、2及3倍频为主。与不对中单一故障下频谱图对比可知,碰摩故障使系统的1倍频能量大幅增大,2和3倍频幅值变化微弱,且引起连续谱的出现,但能量较低,所得计算结果与文献[10]的试验结果吻合。由图10(b)可知,其Poincaré图表现为一封闭的圆环,系统做拟周期运动。
由于不对中-碰摩耦合故障下系统振动能量主要集中在1、2及3倍频成分,且各频率成分间相互独立,因此优化目标函数为系统响应1、2、3倍频幅值最小。

图10 不对中-碰摩耦合故障系统响应特征图Fig.10 Characteristic Diagram of System Response with Misalignment-Rubbing Coupling Faults
不对中-碰摩耦合故障下采用最优拉丁超立方法选取的10组设计参数的计算结果和RBF所得近似模型预测结果对比图,如图11所示。其中1倍频平均误差为0.56%,最大误差为1.44%;2倍频平均误差为1.47%,最大误差为4.10%;3倍频平均误差为0.47%,最大误差为1.20%。近似模型输出变量的误差都能控制在10%以内,说明该近似模型有较高的精确度,可以用该近似模型进行不对中-碰摩耦合故障下转子系统的SFD参数优化。运用NSGA-II进行不对中-碰摩耦合故障下转子系统SFD参数优化,NSGA-II算法参数配置与不对中故障下参数配置相同。据此确定的 SFD 参数最优解为 CS=8×10-5;Ka=6×105;μs=5×10-2。
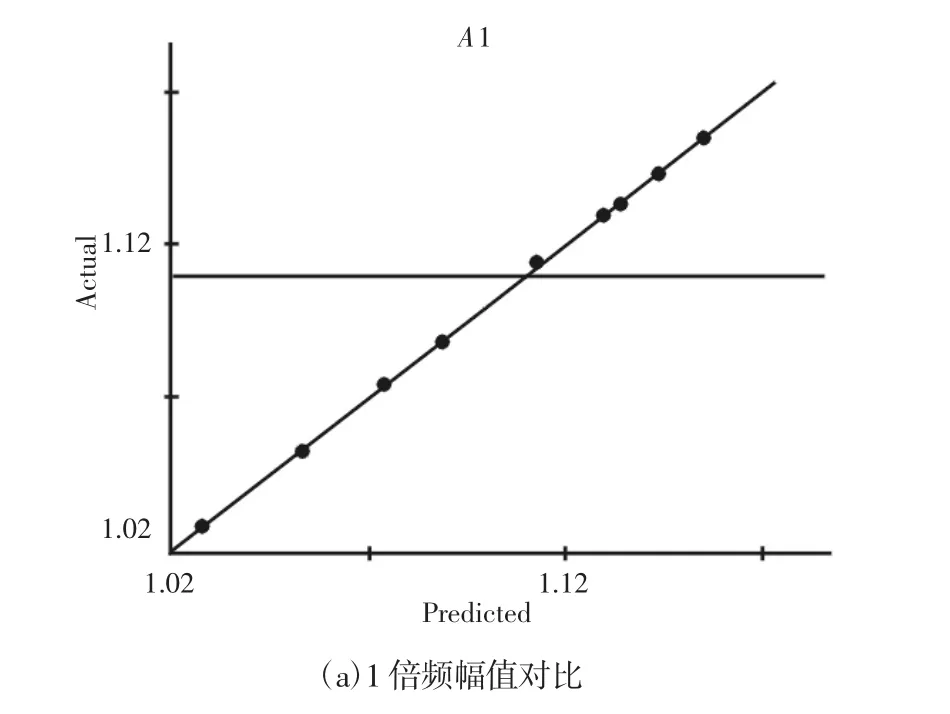

图11 不对中-碰摩耦合故障系统计算结果与近似模型预测结果对比Fig.11 Results Contrast Between Calculated and Approximate Model with Misalignment-Rubbing Coupling Faults
根据该设计参数重新对不对中-碰摩耦合故障下SFD-转子系统进行数值仿真,得到系统动力学响应频谱图,如图12所示。并与优化前频谱图10(a)进行对比。可以看出,优化后,系统动力学响应1倍频幅值由1.116减小到1.033,幅值减小约7.4%;2倍频幅值由0.099减小到0.048,幅值减小约51.5%;3倍频幅值由0.214减小到0.178,幅值减小约16.8%。
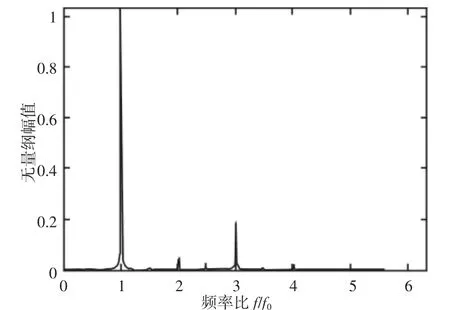
图12 不对中-碰摩耦合故障系统SFD优化后频谱图Fig.12 Spectrum Diagram of SFD Optimized System with Misalignment-Rubbing Coupling Faults
4 结论
(1)对于无故障时的参数优化,不能应用于所有状态,结果表明,故障所引起的非线性振动响应影响很大,不能忽略,在设计SFD时应考虑这种影响。也为SFD的主动控制减振策略奠定基础。
(2)依据NLPQL和NSGA-II算法,针对不同故障状态系统进行参数优化设计,对应每种状态求解最优SFD系统参数,使得SFD减振效果达到最优。优化设计后,无故障时1倍频幅值降低23%;不对中故障时1倍频幅值减小约43.4%,二倍频幅值减小约27.5%,三倍频幅值减小约66.7%;不对中-碰摩耦合故障时1倍频幅值减小约7.4%,2倍频幅值小约51.5%,3倍频幅值小约16.8%。证明了不同故障状态下SFD参数具有局部最优解,验证了针对故障状态转子可变结构SFD工作参数优化方法的可行性,这对可变参数阻尼器针对不同工况下的工作参数设置方法具有重要指导意义。
