非线性悬架系统的最小二乘参数识别方法
2020-09-14李翠梅
李翠梅,周 洋
(郑州科技学院基础部,河南 郑州 450064)
1 引言
汽车悬架系统对于整车的减震与隔振起着至关重要的作用[1-2]。在悬架系统的设计中,虽然全面考虑了实际路况及噪声等激励条件下系统的动力学特征,由于磨损,安装误差,结构及材料非线性等因素的影响,实际使用的悬架系统往往具有较强非线性特征,且不能够达到理想的设计要求[3]。因此,对于实际悬架系统的参数识别及再设计十分重要。
系统的参数识别属于系统辨识的一个重要理论分支,对于线性系统,传统的参数识别方法主要包括最小二乘法[4],极大似然估计[5]及频率响应函数方法[6]。文献[7]在考虑随机噪声情况下,提出一种基于极大似然估计的频域模态参数识别方法,并验证了该方法利用噪声信息,能极大提高阻尼的识别精度。文献[6]利用频谱方法对桥梁悬索张力进行了识别,并通过实验对识别结果进行验证。尽管线性系统参数识别方法已经广泛应用到工程实际当中,对于非线性系统,由于系统的结构及动态特征复杂,传统的线性参数识别方法很难直接应用到非线性系统的参数识别当中[7]。
为解决这一问题,国内外学者提出了多种理论方法[8-9]。例如,文献[8]对具有离散非线性特征的Wiener 系统进行了参数识别研究。文献[9]基于非线性集总参数模型,对不同惯性通道下的液阻悬置系统进行参数识别的研究,并从实验上对理论结果进行验证。虽然这些方法能够准确识别非线性系统参数,然而其缺点也相对明显。绝大多数非线性系统参数识别方法都需要首先建立一个能够用来表征该非线性系统的模型,如双线性模型[10],Wiener-Hammerstein 模型[11],等。
这些模型虽然能够用来预测系统的响应及动力学特征,但是其非线性参数并不具有实际物理意义,因此对这些参数的识别也很难用于指导非线性系统的分析与设计[12]。
针对汽车非线性悬架系统,为解决传统线性及非线性系统参数识别为解决传统线性及非线性系统参数识别中存在的问题,基于最小二乘法原理提出两种用来识别具有物理意义的非线性系统线性及非线性参数的识别方法,首先,介绍了汽车非线性悬架系统的简化模型及其动力学方程。其次,介绍了最小二乘法原理及其在参数识别中的应用,分别提出基于离散化模型和系统输入输出数据的参数识别方法。最后,分别利用两种方法对汽车非线性悬架系统进行参数识别,并通过与真实系统的输出响应比较,对其识别结果进行验证。
2 悬架系统及其非线性模型
在忽略轮胎质量及其弹性影响的前提下,1/4 汽车非线性悬架系统可简化为一个单自由度振动系统[1],如图1 所示。图中:m—车身质量;k1,k3—弹簧的线性及非线性刚度系数;c—悬架系统的阻尼系数;x0(t)和x(t)—悬架系统的输入与输出位移(m)。
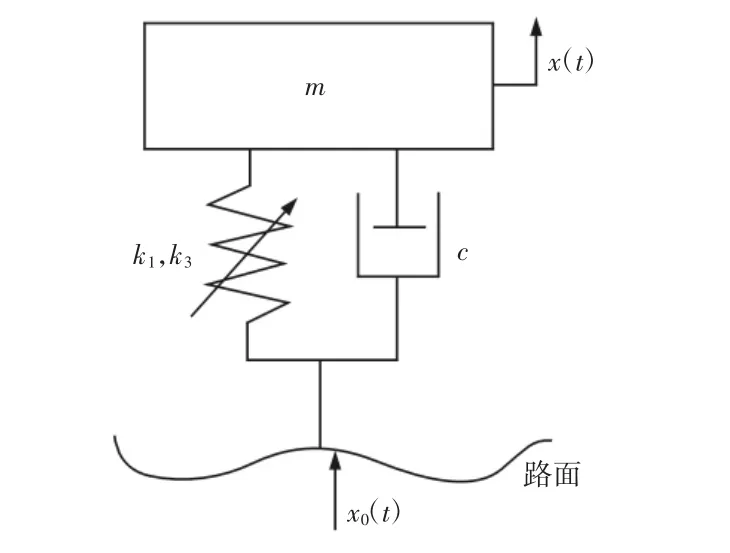
图1 1/4 汽车非线性悬架模型Fig.1 The 1/4 Vehicle Suspension System Model

图2 悬架系统线性及非线性弹簧力示意图Fig.2 The Linear and Nonlinear Spring Force of Suspension Systems
由于非线性参数的影响,悬架系统刚度及阻尼系数很难采用传统的线性方法进行识别。假设在方程(2)中,m=1kg,c=15N/ms-1,k1=1×104N/m 及k3=5×1011N/m3,为克服传统线性方法的局限性,分别介绍了两种基于最小二乘法的非线性系统参数识别方法,对悬架系统的线性参数c,k1及非线性参数k3进行参数识别的研究。
3 基于最小二乘法的参数识别原理

4 非线性悬架系统参数识别
基于最小二乘法的参数识别可以分为两类,若非线性系统模型相对简单,可以基于系统的离散化模型进行参数识别。若非线性系统模型相对复杂,则可通过基于输入输出数据的最小二乘法进行参数识别。针对图1 所示的汽车悬架结构,分别采用两种方法对其线性及非线性参数进行识别。
4.1 基于系统离散化模型的参数识别方法
设Δt 为系统采样时间,fs=1/Δt 为系统的采样频率,则对于系统的动力平衡方程,有:


需要注意的是,在参数识别过程中,若输入幅值过小,如A=1,系统的非线性特征不能完全体现,会导致无法识别非线性参数的情况,因此,在基于离散模型的参数识别中,选择合适的激励信号十分重要。
4.2 基于系统输入输出数据的参数识别方法
若待识别的系统相对复杂,很难通过离散化的方法得到形如式(9)的离散方程,可通过系统输入输出数据,利用最小二乘法进行参数识别。针对汽车悬架系统,共需识别2 个线性参数c,k1及1 个非线性参数k3。由讨论可知,当输入幅值较小时,非线性参数对系统的影响可以忽略不计。因此,可以先在小幅值激励下识别线性参数,进而增大激励幅值,进行非线性参数识别。
4.2.1 线性参数识别方法

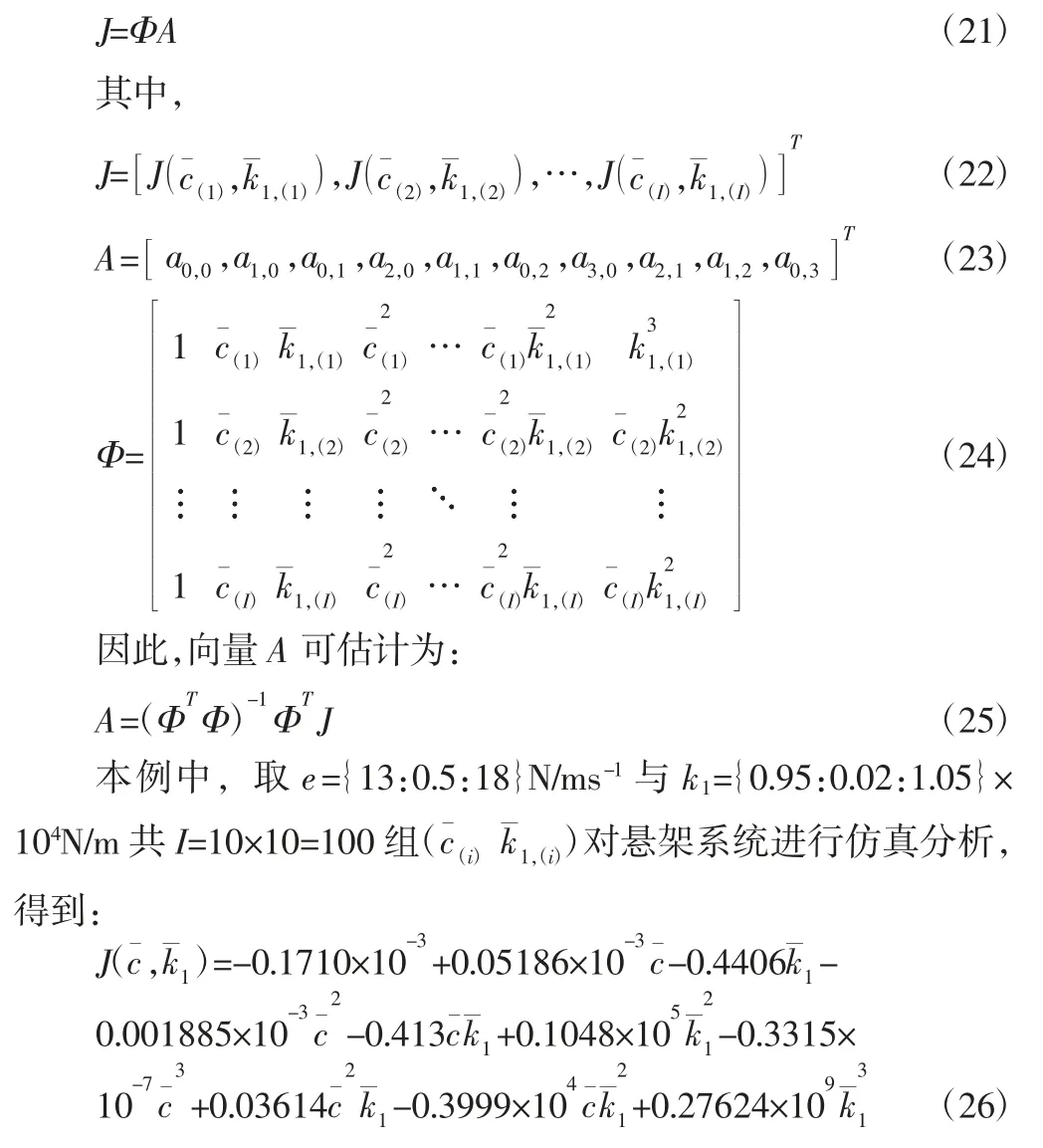
对悬架系统进行I≥6 次仿真实验,得到I 组(c¯,k¯1)及其对应的损失函数值。根据最小二乘法,式(20)可写为矩阵形式:
3 阶多项式线性参数损失函数,如图3 所示。

图3 3 阶多项式线性参数损失函数Fig.3 The 3rd Order Cost Function of the Linear Parameters
由图3 可得,使得J(c,k1)取值最小的点即为线性参数c,k1的估计值:

4.2.2 非线性参数识别方法
在非线性参数识别中,增大输入幅值,式(11)中令A=10,系统仿真中,线性参数为识别得到的结果(27)。因此,非线性参数识别的损失函数可定义为:
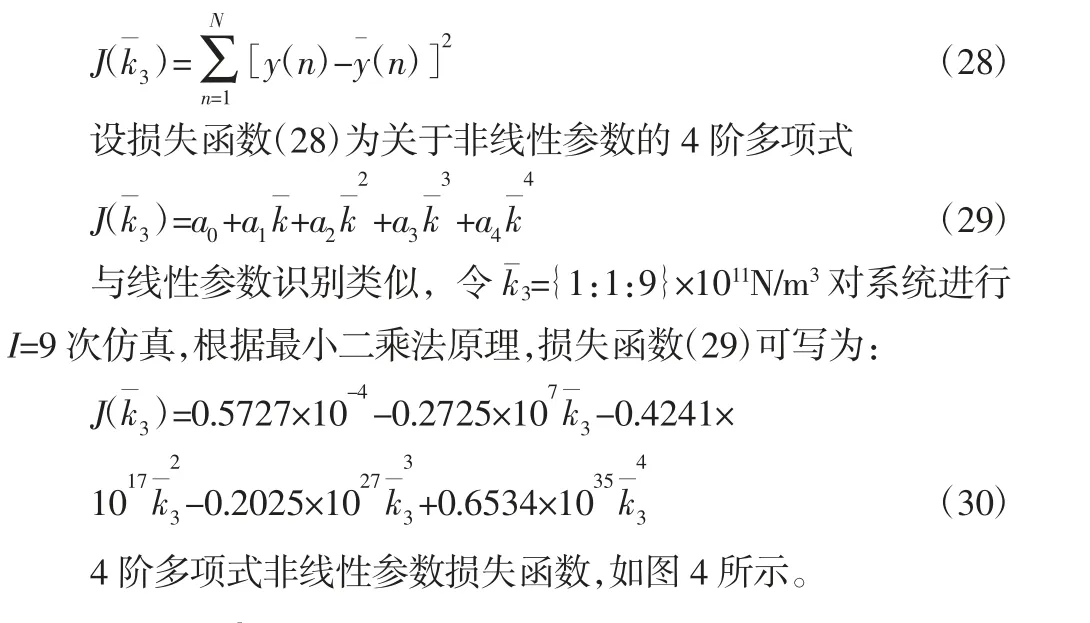
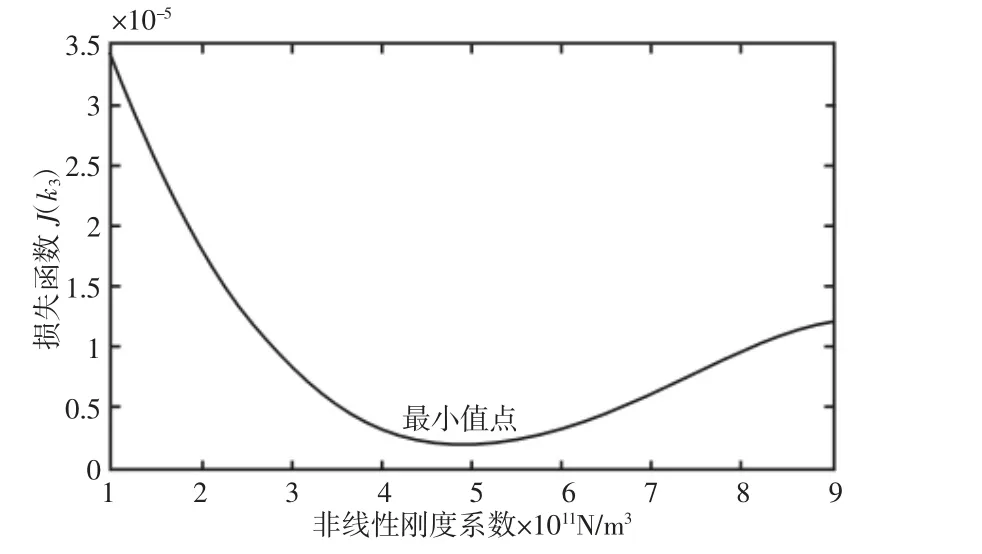
图4 4 阶多项式非线性参数损失函数Fig.4 The 4th Order Cost Function of the Nonlinear Parameters
由图4 可得非线性参数k3的估计值为:

在激励(11),A=10 的作用下,对比了采用基于系统离散化模型的参数识别方法,基于系统输入输出数据的参数识别方法以及真实系统的输出响应结果,如图5 所示。图5 的结果说明,不论采用何种参数辨识方法,基于最小二乘法的参数识别结果能够准确识别出系统的线性及非线性参数,并真实地反映系统的动力学特征。
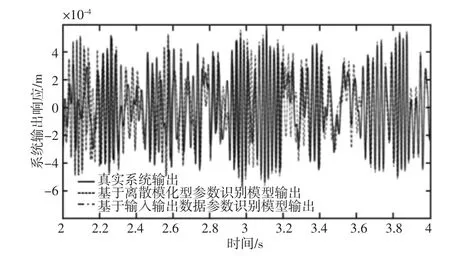
图5 实际系统与辨识系统输出对比Fig.5 Comparison Between the Real System and the Identified System
5 结论
针对非线性汽车悬架系统的参数识别问题,介绍了两种基于最小二乘法的非线性系统参数识别方法,并通过仿真算例对两种识别方法进行验证。以可简化为单自由度非线性系统的汽车悬架为研究对象,基于最小二乘法原理,分别介绍了基于离散化模型的参数识别方法和基于系统输入输出数据的参数识别方法。基于离散化模型的参数识别方法适用于模型结构相对简单的非线性系统,且在参数识别过程中,需要适当选取系统激励的强度。基于系统输入输出数据的参数识别方法可以有效地克服这些缺点,但是需要通过多次激励,分别识别系统的线性与非线性参数。分析结果表明,基于最小二乘法的两种非线性系统参数识别方法均能够准确识别汽车悬架系统的线性及非线性参数,从而对汽车悬架系统的分析与设计提供必要的理论基础。
