探究SMA丝束驱动器在变体飞行器中的应用
2020-09-10苗家瑞
苗家瑞
摘要:改变机翼厚度可以提高飞行器在不同飞行条件下的升力系数,并降低一定阻力。本文提出了一种新型SMA丝束驱动器,该驱动器利用聚四氟乙烯管和橡胶管将多根SMA丝组成束状驱动器,可以输出较大的驱动力和驱动位移,利用传动机构,实现机翼的厚度调节。同时,本文对变厚度机翼进行了受力分析,提出了SMA丝直径的计算方法,为机构设计提供了理论参考。
关键词:形状记忆合金;变厚度机翼;SMA丝束驱动器
1 绪论
变体飞行器是一种可以改变飞行气动外形,以适应不同飞行环境的高机动航空飞行器。变体飞行器通常通过调节机翼翼型来实现气动外形的改变。机翼厚度作为机翼的重要结构参数,其影响着飞行器的升力系数和超声速阻力[1]。变体飞行器的变厚度调节是针对翼型的厚度进行调节,通过机翼上表面的蒙皮变形,改变机翼的厚度,从而改变机翼的气动特性。目前,变体机翼驱动系统大多采用液压驱动或电机驱动,虽然这些驱动方式可以产生较大的驱动力,但其结构复杂,体积和重量较大,不利于飞行器提高机动性[2]。形状记忆合金(Shape memory alloy,SMA)作为一种集传感与驱动为一体的新型智能材料,具有功重比高、对温度敏感、驱动电压低、驱动结构简单、驱动过程平滑无扰动等优点,因此,近年来将SMA材料应用于变体机翼驱动器中已成为新的研究热点[3]。
形状记忆合金利用形状记忆效应来产生驱动力和驱动位移[4]。SMA材料随着温度变化发生马氏体相变,在其相变温度下对SMA材料进行预先拉伸或者弯曲变形,当温度升高至相变温度以上时,SMA材料可以完全恢复到初始状态[3]。SMA丝结构简单,可通过焦耳效应引发形状记忆效应,输出较大的驱动力和驱动位移,是目前应用最广泛的SMA材料。
本文针对变体飞行器的变厚度调节,设计了新型SMA丝束驱动器,并在机翼内部的狭小空间内,利用传动机构改变驱动力和驱动位移的方向,满足了变厚度调节需要的较大的驱动力和驱动位移。
2 SMA丝束驱动器
考虑到驱动蒙皮发生变形的力较大,而一根SMA丝产生的回复力无法满足驱动需求,本文提出一种SMA丝束结构,该结构由多根SMA丝、绝缘套管和橡胶管组成。每根SMA丝外侧套有聚四氟乙烯管,聚四氟乙烯管具有较好的绝缘性和润滑性,保證了SMA丝之间相互绝缘,并能够在绝缘套管内收缩。多根套有绝缘套管的SMA丝平行放置,并安装在橡胶管中,形成SMA丝束驱动器。SMA丝束驱动器安装前,先将SMA丝进行预拉伸,使其具备一定的塑形变形。SMA丝束于稳压直流电源相连,每根SMA丝之间并联。该SMA丝束驱动力利用焦耳效应对SMA丝进行加热,引发形状记忆效应。
3 变体飞行器的变厚度调节
3.1 结构设计
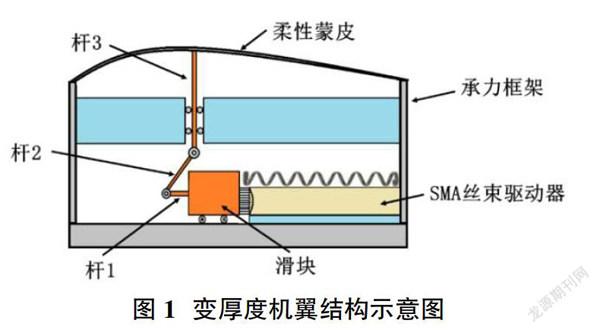
变体飞行器利用SMA丝束驱动器进行厚度调节,其结构由承力框架,SMA束,滑块,定滑轮,复位弹簧和推力杆组成。其中承力框架是驱动装置的承力端,装置中所有零部件的运动都在承力框架之内进行,并负责承受机翼的气动载荷。复位弹簧与被预拉伸的SMA丝驱动器具有同样的长度。被预拉伸的SMA丝束驱动器与复位弹簧的一端与承力框架相连,另一端与滑块相连。滑块右端与SMA丝束驱动器和复位弹簧相连。SMA丝束驱动器和复位弹簧另一端与承力框架相连。SMA丝束驱动器处于被拉伸状态,而复位弹簧处于原长状态。滑块的左边有一根杆(杆1),杆1右端固定在滑块上,左端通过铰接与杆2连接。滑块通过杆1、杆2、杆3与蒙皮相连。其中,杆1与滑块固接,杆2两端与杆1、杆3铰接,因此杆2同时具有直线运动和旋转运动。在杆2的左右两侧,各有两个定滑轮。定滑轮的作用是约束杆2的水平运动,使杆2只进行竖直方向运动,另一方面定滑轮可以减少杆2竖直运动时受到的摩擦阻力。杆3与蒙皮相连,用于驱动蒙皮发生形变。本设计中,蒙皮采用柔性材质,该材质保证在可承受范围内可以发生有效形变,满足变形需求。
3.2 工作原理
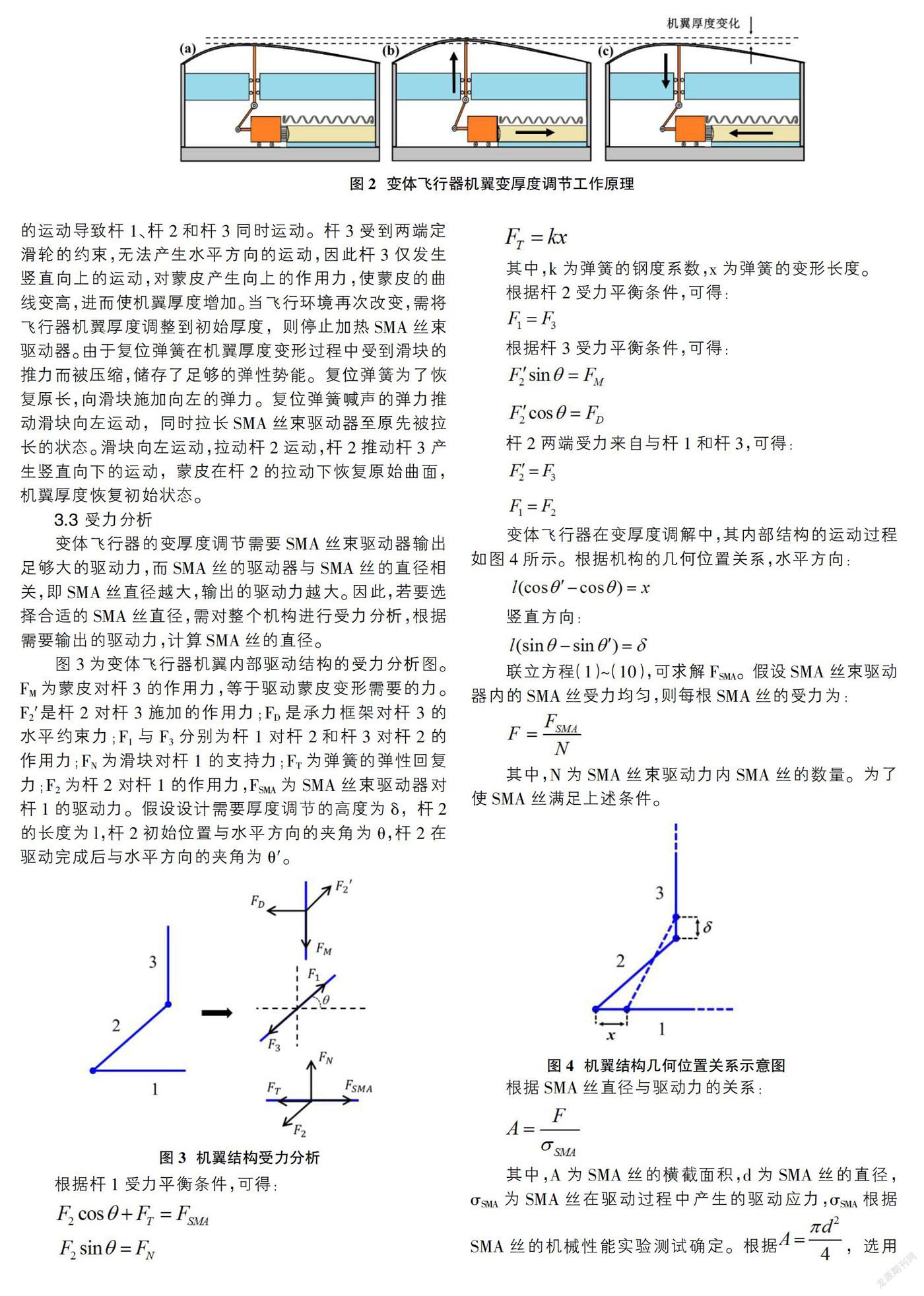
SMA丝束驱动器在变厚度机翼中的应用原理如图2所示,其工作过程可分为三个阶段。图2(a)是机翼处于初始状态。图2(b)是机翼处于变厚度状态,图2(c)是机翼恢复到初始形状。当飞行器飞行环境发生改变,需要调节机翼厚度时,首先对SMA丝束驱动器进行通电。SMA丝在通电后,由于自身的内阻产生焦耳效应,SMA丝温度升高,进而产生形状记忆效应,会恢复到原始长度,即发生收缩。SMA丝束驱动器收缩提供向右的驱动力。在SMA丝束驱动器驱动力的作用下,滑块开始向右运动。滑块受拉力的作用向右运动的同时压缩弹簧,使得弹簧被压缩,同时积蓄弹性势能,该弹性势能用于蒙皮厚度的恢复。滑块的运动导致杆1、杆2和杆3同时运动。杆3受到两端定滑轮的约束,无法产生水平方向的运动,因此杆3仅发生竖直向上的运动,对蒙皮产生向上的作用力,使蒙皮的曲线变高,进而使机翼厚度增加。当飞行环境再次改变,需将飞行器机翼厚度调整到初始厚度,则停止加热SMA丝束驱动器。由于复位弹簧在机翼厚度变形过程中受到滑块的推力而被压缩,储存了足够的弹性势能。复位弹簧为了恢复原长,向滑块施加向左的弹力。复位弹簧喊声的弹力推动滑块向左运动,同时拉长SMA丝束驱动器至原先被拉长的状态。滑块向左运动,拉动杆2运动,杆2推动杆3产生竖直向下的运动,蒙皮在杆2的拉动下恢复原始曲面,机翼厚度恢复初始状态。
3.3 受力分析
变体飞行器的变厚度调节需要SMA丝束驱动器输出足够大的驱动力,而SMA丝的驱动器与SMA丝的直径相关,即SMA丝直径越大,输出的驱动力越大。因此,若要选择合适的SMA丝直径,需对整个机构进行受力分析,根据需要输出的驱动力,计算SMA丝的直径。
图3为变体飞行器机翼内部驱动结构的受力分析图。FM为蒙皮对杆3的作用力,等于驱动蒙皮变形需要的力。F2′是杆2对杆3施加的作用力;FD是承力框架对杆3的水平约束力;F1与F3分别为杆1对杆2和杆3对杆2的作用力;FN为滑块对杆1的支持力;FT为弹簧的弹性回复力;F2为杆2对杆1的作用力,FSMA为SMA丝束驱动器对杆1的驱动力。假设设计需要厚度调节的高度为?啄,杆2的长度为l,杆2初始位置与水平方向的夹角为?兹,杆2在驱动完成后与水平方向的夹角为?兹′。
根据杆1受力平衡条件,可得:
其中,k为弹簧的钢度系数,x为弹簧的变形长度。
根据杆2受力平衡条件,可得:
根据杆3受力平衡条件,可得:
杆2两端受力来自与杆1和杆3,可得:
变体飞行器在变厚度调解中,其内部结构的运动过程如图4所示。根据机构的几何位置关系,水平方向:
竖直方向:
联立方程(1)~(10),可求解FSMA。假设SMA丝束驱动器内的SMA丝受力均匀,则每根SMA丝的受力为:
其中,N为SMA丝束驱动力内SMA丝的数量。为了使SMA丝满足上述条件。
根据SMA丝直径与驱动力的关系:
其中,A为SMA丝的横截面积,d为SMA丝的直径,?滓SMA为SMA丝在驱动过程中产生的驱动应力,?滓SMA根据SMA丝的机械性能实验测试确定。根据,选用SMA丝的直径d应满足:
4 总结
机翼厚度作为机翼的重要结构参数,影响着飞行器的升力系数和超声速阻力。本文提出将SMA丝束驱动器应用于变体飞行器中,可以实现机翼的厚度调节。同时提出了一种SMA丝直径的计算方法,该计算方法可以根据变厚度调节需要的厚度变化和气动阻力,计算出合适的SMA丝直径,为驱动器的设计提供重要基础。本文探究了SMA丝束驱动器在变体飞行器中的应用,为变体飞行器的驱动器设计提供了新的结构方案,后续的工作将围绕验证SMA丝束的性能展开。
参考文献:
[1]王云.航空航天概论[M].北京航空航天大学出版社,2009.
[2]刘俊兵,王帮峰,芦吉云.基于SMA的差动式变体机翼后缘驱动器研究[J].兵器材料科学与工程,2015(4).
[3]于东,张博明,梁军.形状记忆合金在航空工业中的应用研究进展[J].金属功能材料,2007,14(6):27-32.
[4]杨凯.形状记忆合金的研究与应用[J].金属功能材料, 2000,7(5):7-12.
