基于扩展卡尔曼滤波的镍氢电池SOC估计
2020-09-10李家月贠海涛徐钦赐王胜达
李家月 贠海涛 徐钦赐 王胜达
摘要:针对电池SOC估计所用安时积分法的缺陷,本文采取了EKF(扩展卡尔曼滤波)算法,在描述电池模型系统的状态方程和观测方程上应用这种算法估算SOC值。通过实验看到了,EKF算法不存在安时积分法的误差累积问题且有对错误初始SOC值的自我纠正能力,而且较为精确和稳定,其估算误差的小于5%。
关键词:镍氢电池;电池SOC估计;无迹卡尔曼滤波
0 引言
新能源汽车已经成为当今汽车行业的热点,各国政府和企业都加大了对新能能源汽车的研发投入,到目前新能源汽车主要分为纯电动汽车、混合动力汽车和燃料电池汽车[1]三大方向。作为燃油车向新能源车的过渡产物,混合动力汽车一直相比纯电动汽车有着续航里程和动力性能上的优势,相比燃料电池汽车产业又比较成熟,所以是目前前景比较好的新能源汽车发展方向[2]。其中镍氢电池因为其比功率高、使用安全、大电流充放性能好和成本不高等优势,所以在混合动力汽车上使用很广泛。
动力镍氢电池作为混合动力汽车重要的能量来源,建立一个精确的电池模型以及对其SOC(State Of Charge,荷电状态)的估算能够充分发挥电池的使用性能,延长其使用寿命,也是为后续BMS(Battery Management System,电池管理系统)对其进行合理有效的能量管理做好铺垫。在制定各种电池管理策略前使用电池模型进行仿真来检验策略是否能满足预期目标,不需要使用实际样本,从而节约了成本,也缩短了开发周期。电池的SOC则像燃油车上的油量计一样表征电池的电量多少,防止电池处于过充过放的状态,造成活性物质永久性的损失,降低电池的使用寿命和安全性。因此,对混合动力汽车来说,电池的SOC估算是非常重要的。本文采用某公司产的六节串联镍氢电池模组,额定电压为7.2V,容量为6Ah。
1 电池等效电路模型的建立
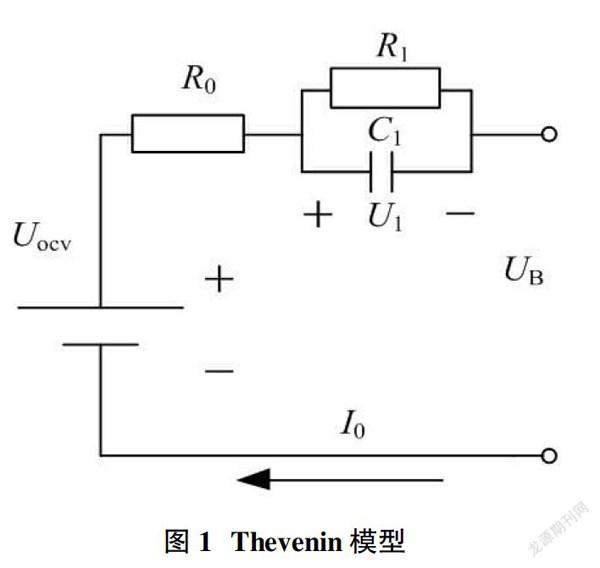
等效电路模型使用电阻、电容、电压源等常见的基本电路元件来模拟实际中电池的电压和电流之间的关系,较为直观、易于理解,适用于多种电池,是如今电池建模研究中常常使用的方法。本文采用Thevenin模型。
Thevenin模型是依据Thevenin定理而提出的模型,模型中电动势即电池开路电压Uocv是随电池SOC值变化而改变的,充放电时开路电压Uocv和SOC值时固定的对应关系的。电阻R0为电池的欧姆电阻,模拟了电池充放电时突然的电压升和电压降,R1为电池的极化电阻,C1为电池内部极化过程中产生的容抗,电阻R1和电容C1共同模拟了电池内部的极化过程,对应着电池充放电初始时端电压的缓慢变化[3][4]。模型的动态电路方程如式(1)。
式中,U1为电容C1两端的电压。
2 扩展卡尔曼滤波算法应用
卡尔曼滤波算法(KF)是在上个世纪60年代提出的一种时域滤波方法,能够对系统状态进行最优估计,算法采用了递推计算形式,数据存储量低,算法递推过程可以分为五个步骤。卡尔曼滤波算法能够对线性系统的状态变量做出最优估计,但在电池模型属于非线性的系统,如果忽略其中的某些非线性因素,将会造成很大的误差。因此电池SOC估计可以采用EKF算法。
EKF算法的核心思想是将非线性系统中非线性函数按照一阶泰勒级数展开,忽略二阶及以上的高阶项,将原系统转变成一个近似的线性化模型,然后使用线性卡尔曼滤波算法进行状态估计。
非线性系统的状态方程和观测方程表示如下:
假设函数f(x(k-1),u(k-1))和g(x(k),u(k))在每个状态变量的预测点均是可导的,将两函数在x(k-1)点处进行泰勒级数展开,只保留常数项和一阶项后得到适用于卡尔曼算法的线性系统形式。
式中f(x(k-1),u(k-1))为系统的状态函数;g(x(k),
u(k))为系统的观测函数;x(k)为系统在k时刻的状态变量;y(k)为系统在k时刻的观测变量;u(k-1)为系统在
k-1时刻外部输入变量;A(k-1)为系统的状态转移矩阵;
B(k-1)为系统的输入控制矩阵;C(k)和D(k)为系统的观测矩阵;w(k-1)和v(k)分别为系统的过程激励噪声和观测噪声,并假设两者是期望为零、方差阵分别为Q和R的不相关白噪声。线性化后的系统应用卡尔曼滤波算法即可得到下边EKF算法的五个递推方程。
状态变量预测方程:
(6)
噪声协方差矩阵预测方程:
(7)
卡尔曼滤波增益矩阵方程:
(8)
状态变量更新方程:
(9)
噪声协方差矩阵更新方程:
(10)
对电池进行卡尔曼滤波要首先建立起电池系统的离散状态方程和观测方程,以电流I0为系统的外部输入变量,工作电压UB为系统的观测变量,电池的SOC、RC网络的电压U1为系统的状态变量。根据电池模型,各个状态参数在外部输入变量电流I0的作用下,得到电池连续系统的状态方程和观测方程分别如下:
(11)
UB ( t)=Uocv ( SOC,I0)-U1(t)-i(t)R0(12)
然后按照前文EKF算法的五个运算方程进行,并在MATLAB中编写m文件运算[5]。
3 仿真验证
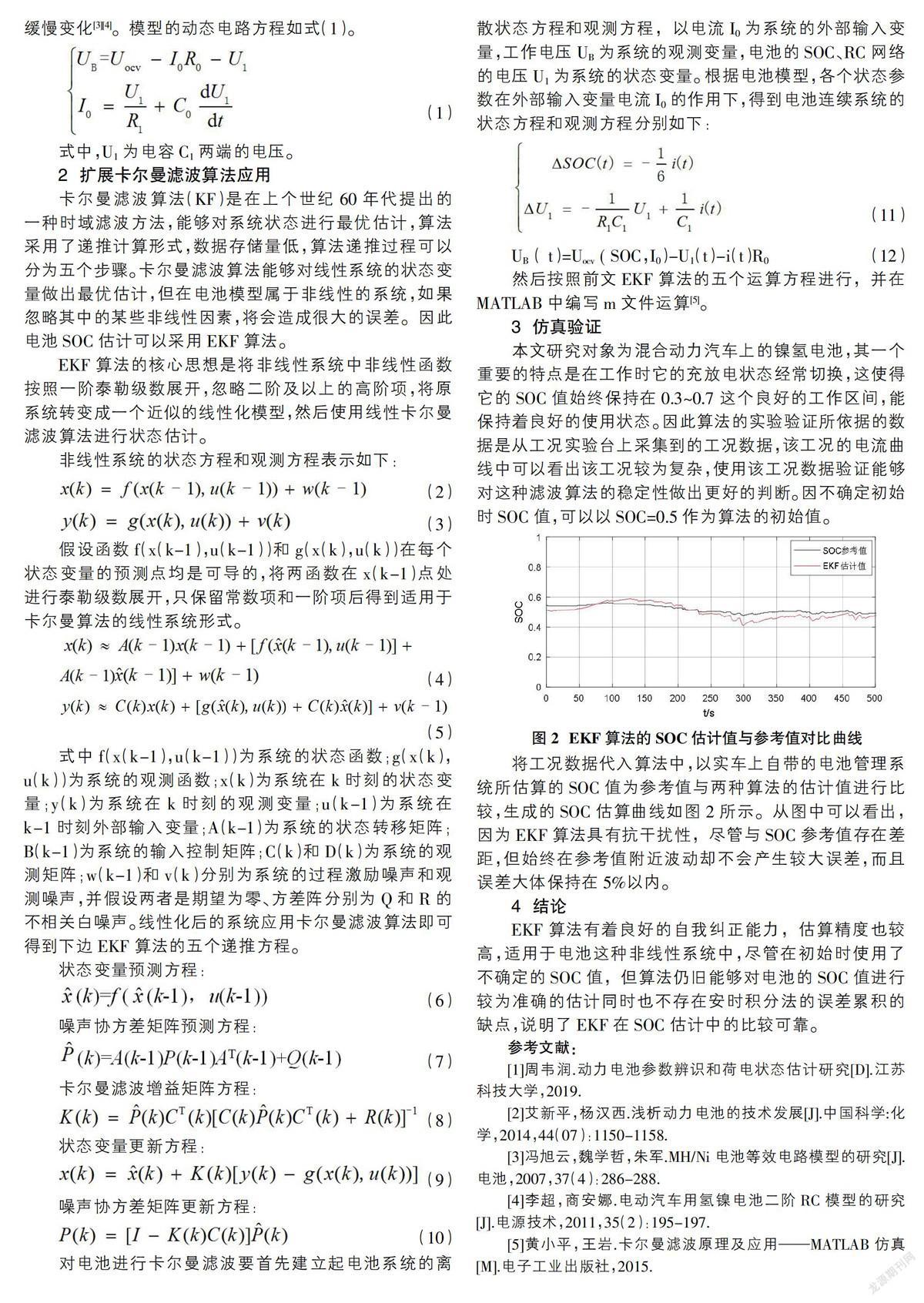
本文研究对象为混合动力汽车上的镍氢电池,其一个重要的特点是在工作时它的充放电状态经常切换,这使得它的SOC值始终保持在0.3~0.7这个良好的工作区间,能保持着良好的使用状态。因此算法的实验验证所依据的数据是从工况实验台上采集到的工况数据,该工况的电流曲线中可以看出该工况较为复杂,使用该工况数据验证能够对这种滤波算法的稳定性做出更好的判断。因不确定初始时SOC值,可以以SOC=0.5作为算法的初始值。
将工况数据代入算法中,以实车上自带的电池管理系统所估算的SOC值为参考值与两种算法的估计值进行比较,生成的SOC估算曲线如图2所示。从图中可以看出,因为EKF算法具有抗干扰性,尽管与SOC参考值存在差距,但始终在参考值附近波动却不会产生较大误差,而且误差大体保持在5%以内。
4 结论
EKF算法有着良好的自我纠正能力,估算精度也较高,适用于电池这种非线性系统中,尽管在初始时使用了不确定的SOC值,但算法仍旧能够对电池的SOC值进行较为准确的估计同时也不存在安时积分法的误差累积的缺点,说明了EKF在SOC估计中的比较可靠。
参考文献:
[1]周韦润.动力电池参数辨识和荷电状态估计研究[D].江苏科技大学,2019.
[2]艾新平,杨汉西.浅析动力电池的技术发展[J].中国科学:化学,2014,44(07):1150-1158.
[3]冯旭云,魏学哲,朱军.MH/Ni电池等效电路模型的研究[J].电池,2007,37(4):286-288.
[4]李超,商安娜.电动汽车用氢镍电池二阶RC模型的研究[J].电源技术,2011,35(2):195-197.
[5]黄小平,王岩.卡尔曼滤波原理及应用——MATLAB仿真[M].电子工业出版社,2015.
作者簡介:李家月(1993-),男,河北邢台人,硕士,研究方向为汽车电子与电动汽车技术。
