巡逻机器人机械臂运动学与工作空间分析
2020-09-10李艳杰李星晓眭晋李晨蕊
李艳杰 李星晓 眭晋 李晨蕊




摘要:针对巡逻机器人机械臂控制问题,首先建立了该六自由度机械臂的D-H坐标系,求解机械臂正逆运动学,并基于蒙特卡洛法对机械臂的工作空间进行分析,通过MATLAB实现,得到机械臂工作空间的三维点云图,分析得出机械臂的可达工作范围,为今后对巡逻机器人的运动控制与路径规划等研究方向奠定了基础。
关键词:六自由度机械臂;D-H法;运动学;蒙特卡洛法;工作空间
0 引言
警用机器人技术是机器人技术的一个重要分支,是当前的重点研究方向之一,而警用机器人在监管场所巡逻领域的应用需求逐渐增多。监管场所巡逻机器人已成为警用机器人体系中的重要组成部分[1],执行的任务主要是监管收监对象的人身安全和日常行为,及时发现、记录并上报监管场所的异常情况,递送食物或药品给收监人员,可以有效降低狱警对异常情况处理的危险性,减轻巡逻狱警的工作压力,提高监管场所的管理水平[2]。
中国科学院沈阳自动化研究所面向室内巡逻任务研制巡逻机器人,针对递送食物或药品这一具体任务,设计了一种搭载在地面移动平台上的六自由度机械臂,用于巡逻机器人在監管场所巡逻时执行抓取任务。为了对该机械臂进行操作控制,本文基于标准D-H方法建立机械臂的运动学模型,并使用蒙特卡洛法在MATLAB中形成机械臂可达工作空间的三维点云图,通过分析点云图,得到机械臂的可达工作范围,为机械臂运动控制和路径规划等研究方向奠定了基础。
1 机械臂运动学建模
对机械臂运动学的研究是机器人学的基础,是为了得到机械臂关节空间与操作空间之间的映射关系[3]。本节将基于标准D-H方法建立移动机械臂的运动学模型,并求解其逆运动学。
1.1 正运动学模型
本文研究的机械臂实物图如图1所示。首先建立连杆坐标系{i},将笛卡尔坐标系建立在移动机械臂的每个关节轴处,保证每个关节有且仅有一个自由度,基座作为坐标系{0}。采用标准D-H参数法[4]连杆坐标系进行巡逻机器人机械臂连杆坐标系的建立,如图2所示。
已知机械臂各关节的关节角变量来求解机械臂末端位姿这一过程被称为机械臂的正运动学,一组关节变量能且仅能解出一个末端位姿。
依据巡逻机器人机械臂设计规定的关节初始角度以及各关节运动范围可以得到机械臂的标准D-H参数,具体数值见表1。
机械臂在初始位置时,
1.2 逆运动学求解
逆运动学和正运动学是一个互逆运算的过程,逆运动学是已知机器人末端连杆坐标系的位姿计算机器人全部关节的关节角变量,但逆运动学的解是不确定的,甚至不存在。
本文所研究的机械臂,其肩关节的俯仰、肘关节的俯仰与腕关节的俯仰这三个相邻转动关节的关节轴互相平行,符合Pieper准则,其逆运动学具有封闭解。所以本文采用封闭解方法求解逆运动学。
根据正运动学模型可知,方程中的许多角度都是耦合在一起的,为使角度解耦,可以使用分离变量法[5]。
①求1关节角度。
由于3和5都出现了多解,因此最终求解可能得到4组解。另外由于机械臂腕关节“翻转”可能得到另外4组解,因此一共会求出8组解。对于多解的选取问题,本文采用速度最快原则,求出8组解与移动机械臂当前角度向量的方差和,选取方差和最小的一组作为逆运动学的解。
2 机械臂工作空间分析
为了判定目标抓取物是否能被机械臂操作,分析机械臂的可达工作空间是必须要完成的一项工作。可达工作空间是机械臂末端可以到达的所有点的集合。
2.1 工作空间求解方法分析
常用求解机器人工作空间的方法有几何绘图法、数值法和解析法[6]。几何绘图法方法直观,但获得的是工作空间的剖截面或剖截线,当关节数量较多时,无法准确描述机器人的三维空间。数值法是基于极值理论和优化方法,通过计算机器人工作空间边界上的点、线和面来构造机器人工作空间,但是计算得出的工作空间的准确程度和采样点的数量有直接关系,而采样点的数量将直接影响计算机的计算速率。解析法得到的表达式往往过于复杂,不适用于工程设计。结合上述方法的优缺点和本文所研究机械臂的硬件条件,采用数值法来进行工作空间的求解比较合适。
蒙特卡洛法是数值法中最常用的方法,它实现简单,在求解工作空间时被广泛使用。蒙特卡洛法是一种基于统计理论和概率论的数值方法,通常用于工程中一些随机物理现象的描述[7]。采用蒙特卡洛方法求解机器人工作空间时,将机器人所有关节在其取值范围内随机遍历,再通过运动学正解计算出机器人末端执行器的随机三维坐标点,当每个关节变量取到足够的随机值时,机器人工作空间就是机器人末端执行器的三维空间坐标集合,将所有三维坐标点显示出来,该三维图形就是机器人的工作空间仿真图形,从而完成对机器人工作空间的分析。
综上,本文将基于蒙特卡洛法来进行工作空间的求解。
2.2 工作空间分析
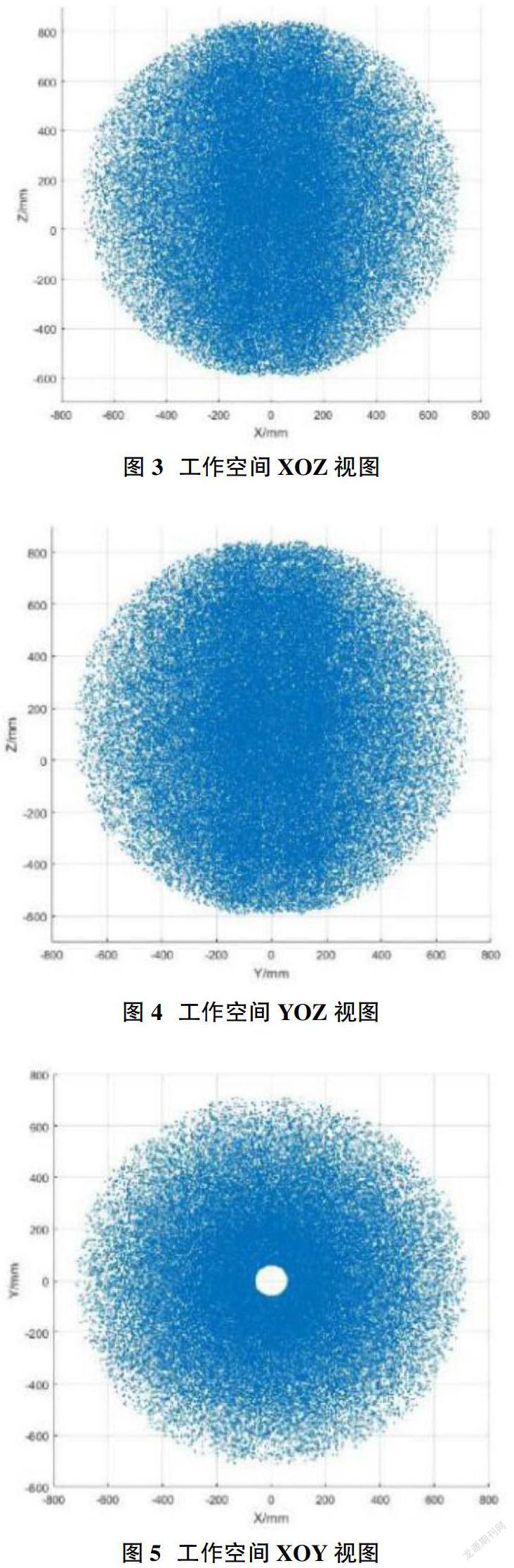
基于蒙特卡洛法在MATLAB中编写程序,通过多次尝试,发现将随机采样点样本数调整为100000时,出图效果和出图时间相对合适,得到巡逻机器人机械臂三维工作空间点云图如图3~图6所示。
从图3~图6可知:本文研究的移动机械臂可达工作空间可以近似的看成一个半径为703.35mm的球体,由于关节转动范围、机械结构的尺寸原因,在工作空间内部存在末端执行器不能到达的区域,从而形成空洞或者空腔,内部空洞为贯穿整个工作空间,且以基座坐标系Z轴为轴线,半径为62.545mm的圆柱体。
3 结论
本文基于标准D-H方法建立了巡逻机器人机械臂运动学模型;在MATLAB平台上基于蒙特卡洛法得到了机械臂可达工作空间的三维点云图,确定了机械臂的可达工作空间,可达工作空间的确定可以明确判断目标物体是否能被机械臂操作,这对于该机械臂的路径规划与操作控制具有重要意义。
参考文献:
[1]李剑,董钦,韩忠华,曹钧.警用机器人在重要场所示范应用思考[J].警察技术,2018(03):20-22.
[2]刘业龙.监狱夜巡机器人的机构设计与分析[D].电子科技大学,2017.
[3]Craig J J. Introduction to Robotics Mechanics and Control 3 rdEdition[J]. Systems Applications,1989, 14(3): 263-313.
[4]Denavit J.A kinematic notation for lower-pair mechanisms based on matrices[J].Trans.of the ASME.Journal of Applied Mechanics,1955,22:215-221.
[5]张付祥,赵阳.UR5机器人运动学及奇异性分析[J].河北科技大学学报,2019,40(1):51-59.
[6]李保丰,孙汉旭,贾庆轩,陈钢.基于蒙特卡洛法的空间机器人工作空间计算[J].航天器工程,2011,20(04):79-85.
[7]赵燕江,张永德,姜金刚,邵俊鹏.基于Matlab的机器人工作空间求解方法[J].机械科学与技术,2009,28(12):1657-1661,1666.
