自然光照环境下基于人工蜂群算法的农业移动机器人视觉导航线提取
2020-09-10孟庆宽杨晓霞刘永江张振仪
孟庆宽, 杨晓霞, 刘 易, 刘永江, 张振仪
(1.天津职业技术师范大学自动化与电气工程学院,天津 300222; 2.天津市信息传感与智能控制重点实验室,天津 300222)
利用农业移动机器人进行自动化导航作业,能够显著提高田间作业速度,降低生产成本,避免劳动者暴露在高温、高湿等恶劣环境中[1]。基于机器视觉导航的农业移动机器人具有作业效率高、实时性好、系统成本低等优点,已经成为国内外农业机械导航领域的一个研究重点[2]。导航基准线提取是农业移动机器人进行导航作业的关键环节之一,实时准确地检测作物行中心线和导航路径能有效提升移动机器人的作业速度与精度。
农田环境复杂多变,光照变化、杂草噪声、阴影遮挡及导航基准线检测算法的鲁棒性对于农业移动机器人能否高效稳定地进行导航作业有重要影响。为了克服光照变化对视觉图像处理产生的干扰,安秋等[3]提出了一种基于光照稳定性及光照无关图的导航信息获取方法,提高了导航路径识别对光照变化的适应性。Jiang等[4-7]在RGB[R:红(Red),G:绿(Green),B:蓝(Blue)]、HIS[H:色调(Hue),I:强度(Intensity),S:饱和度(Saturation)]和YCrCb[Y:明亮度(Luminance),Cr:红色分量色度(Chrominance of red),Cb:蓝色分量色度(Chrominance of blue)]颜色空间下,分别选择2G-R-B颜色因子、H分量及Cr分量将彩色图像转换为灰度图像,以降低图像分割对光照变化的敏感度。由于R、G、B 3个分量相互耦合,随光照度的变化而变化,因此2G-R-B颜色因子对光照变化的适应性不强;H分量与RGB颜色空间的转化是非线性的,在一定程度上会导致图像失真,从而使图像处理结果产生误差;YCrCb颜色空间由明亮度分量、红色分量、蓝色分量构成,没有对绿色分量进行有效表达,不适合处理农田绿色作物图像。在作物行直线拟合方法的选择上,Gée等[8-9]采用Hough变换进行作物行识别,存在累加器峰值较难确定、计算量大的问题,而且当杂草噪声较大时, 作物行直线检测的实时性和准确性变差。司永胜等[10]采用最小二乘法进行早期作物行中心线检测,基于作物行特征点邻近关系对特征点进行分类,对归类后的特征点通过最小二乘法进行直线拟合,得到作物行中心线,但在归类过程中存在将杂草噪声点归为作物特征点的情况,会对作物行直线的拟合精度造成影响。姜国权等[11]提出基于图像特征点粒子群聚类算法的麦田作物行检测方法,通过粒子群聚类算法对图像特征点进行聚类,然后对每类特征点进行直线拟合,获取麦田作物行中心线,与标准Hough变换相比,运行速度提高了1倍。何洁等[12]通过扫描滤波算法识别作物行中心线,结果显示,该算法计算速度快、适应能力强,但算法检测的准确性主要取决于移动步长的选择。孟庆宽等[13]应用粒子群算法在图像顶边和底边的像素点集合中搜索作物行中心线,进而得到导航路径,不过图像顶边和底边区域范围内的大部分像素点距离作物行中心线较远,可见算法的检测速度与准确性还有进一步提升的空间。刁智华等[14]采用最大正方形提取作物骨架,通过直线拟合得到作物行直线,由于算法需要对每个目标像素点查找最大正方形,从而增加了计算复杂度,耗时较多,在高速导航作业的情况下容易导致系统响应速度产生延迟。陈子文等[15]提出一种基于自动Hough变换累加阈值的多作物行提取算法,实现了对不同生长时期的生菜、绿甘蓝的准确识别,不过此算法涉及最优阈值计算,平均耗时约为1 s,作物行直线提取平均耗时约为200 ms,算法的整体检测速度偏低。关卓怀等[16]根据图像灰度垂直投影值动态设定感兴趣区域,通过水平扫描获取作物行中心线拟合关键点,采用多段3次B样条曲线拟合法提取水稻待收获区域边界线, 可以准确识别已收获区域和未收获区域。杨洋等[17]采用基于快速区域卷积神经网络(Faster Region-based Convolutional Neural Network,Faster-R CNN)的检测框架对多株玉米根茎进行识别定位,基于已识别的玉米根茎位置,通过直线拟合方法获取导航路径信息,1 s可检测7帧图片。Faster-R CNN属于2阶段目标检测法,需要在特征图上生成检测框信息,由于生成检测框会耗费一定时间,因而导致算法的整体检测速度受到限制。
综上所述,针对光照变化对图像处理的影响,本研究利用图像熵估计图像质量,当光照条件变化时,通过对摄像机曝光时间进行调节,控制图像亮度,使作物与土壤相比具有良好的对比度,从而提高分割图像的完整程度;在导航路径识别算法方面,本研究旨在提出一种基于人工蜂群算法的作物行中心线提取方法,通过对作物行特征点空间进行迭代搜索,选择由适应度最高的特征点构成的直线作为作物行中心线,从而有效提高导航路径识别的准确性和速度。
1 图像熵计算与曝光时间的调整
出于成本的考虑,农业移动机器人视觉传感器多采用普通工业摄像机,当外界光照条件变化时,需要手动调节摄像机参数或者光圈,但是手动调节相机无法使参数快速准确地达到适当的值,从而不能满足农业机器人高效作业的需求。除了调整光圈外,改变摄像机曝光时间也可以改变图像质量。研究发现,图像曝光时间与图像熵之间存在非线性映射关系,当图像曝光时间最佳时,图像熵会达到最大值[18]。为此,本研究根据图像熵在线调整摄像机曝光时间,避免图像出现过曝光或欠曝光,以降低图像分割对光照变化的敏感程度,使作物信息可以完整清晰地从背景环境中分割出来。
在信息论中,熵是对不确定性的度量。熵越高,能传输的信息越多;熵越低,则表示可传输的信息越少。在1幅图像中,不同位置的像素具有不同的灰度,用xi(i=1,2,…,k)表示,其中k表示图像灰度级。用Pi表示各灰度级出现的概率,图像熵(E)的计算公式为
(1)
式中,P1表示灰度级为1的像素出现的概率,Pk表示灰度级为k的像素出现的概率。
设1幅图像的分辨率为m×n(m表示图像高度,n表示图像宽度),如果所有灰度分布均匀,则计算得到的图像熵具有最大值,此时图像中所有灰度级的像素出现的概率相同:
(2)
因此,图像熵最大值(Emax)的计算公式为
(3)
对于灰度图像,图像的灰度级为256,因此图像熵的最大值为8,不过该值是在理想条件下得出的,在实际情况中图像灰度很难实现均匀分布,所以实际环境中的图像熵将小于Emax。图像熵与摄像机曝光时间近似呈现抛物线形关系(开口方向向下),当图像曝光时间最佳时,对应的图像熵最大,图像中包含的信息最多[19]。
由于图像熵与曝光时间之间的函数表达式未知,因此本研究采用差值法计算最佳曝光时间(xopt)。算法的基本思路如下:在图像曝光时间范围内插入2个点,分别计算2个点对应的图像熵并进行比较,根据比较结果移动插值点的位置,缩小最佳曝光时间区间。重复上述过程,不断缩小最佳曝光时间的取值范围,最后收敛到最佳曝光时间。算法的具体步骤如下:
(1)利用2G-R-B因子将彩色图像转换为灰度图像,设曝光时间取值范围为[a,b],搜索移动步长为t_step, 终止阈值为T。
(2)建立临时变量a_temp、b_temp和插入变量x1、x2,令a_temp=a,b_temp=b。
(3)x1=a_temp+t_step,x2=b_temp-t_step。如果|x1-x2|≤T,则执行步骤(5),否则执行步骤(4)。
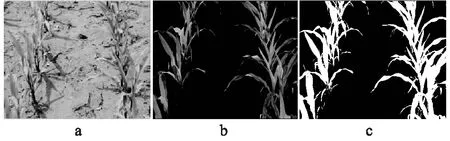
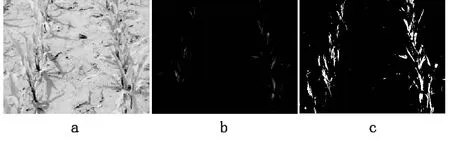
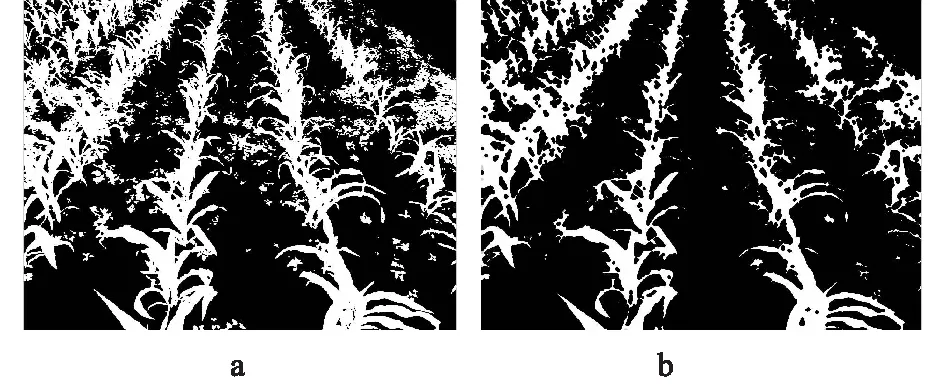
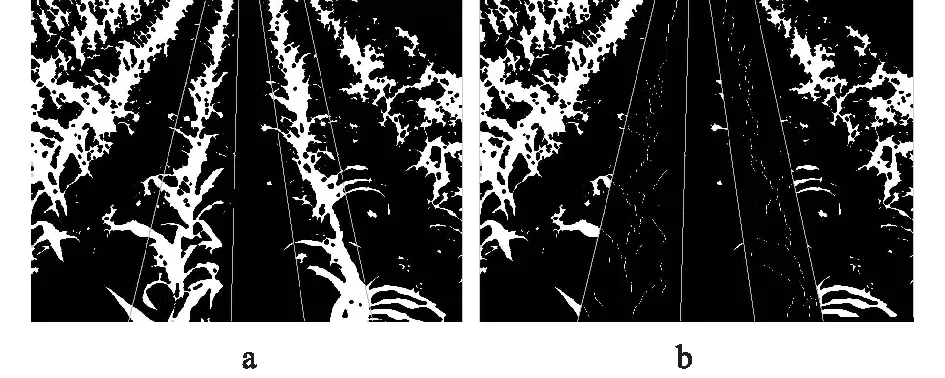
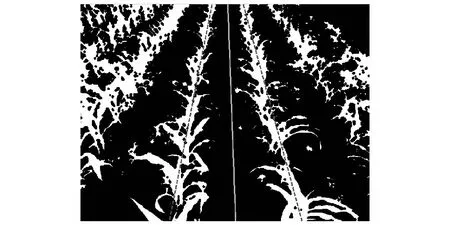
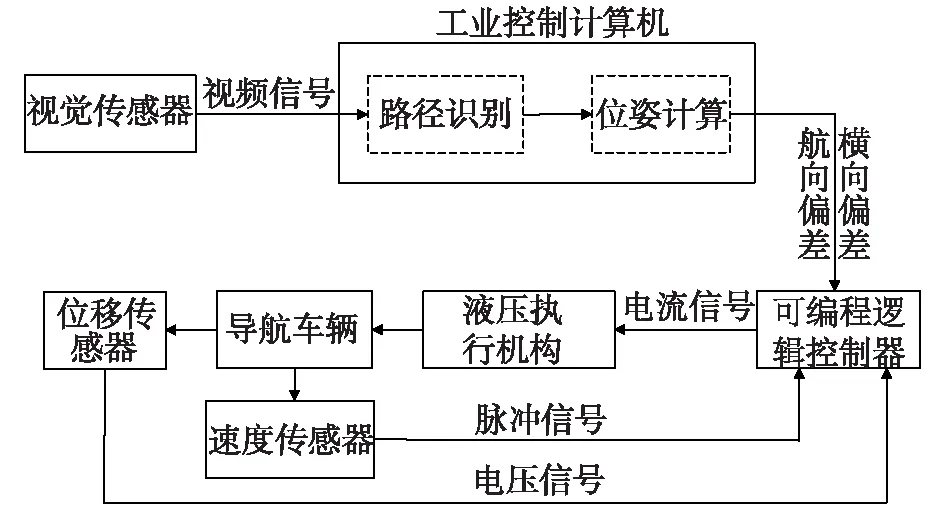
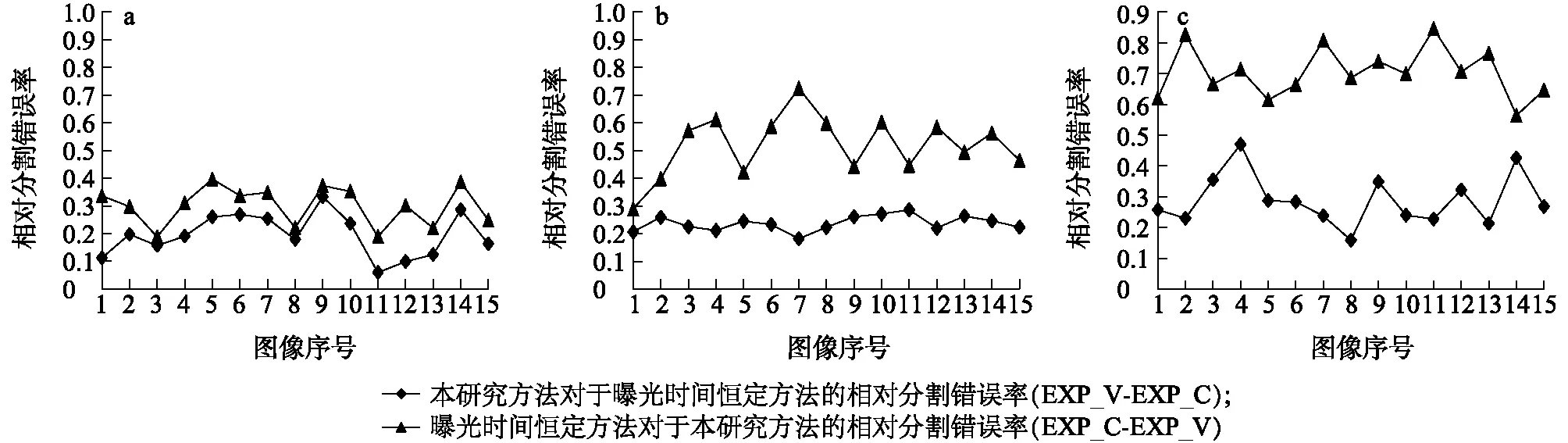
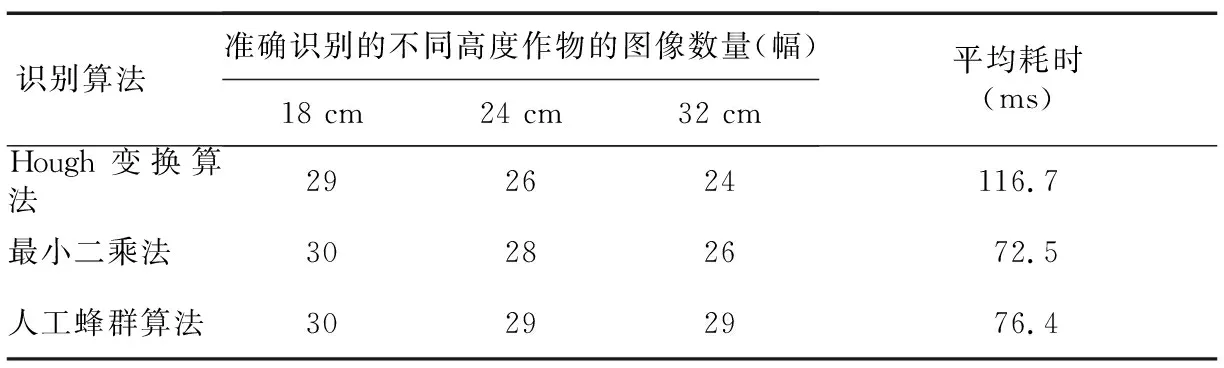
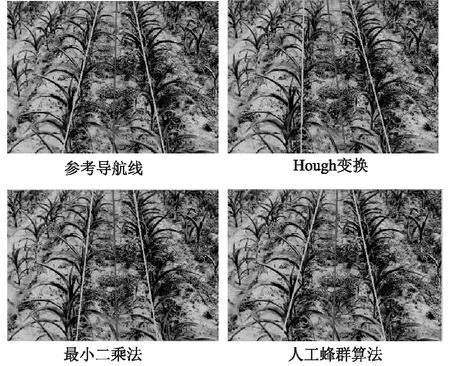
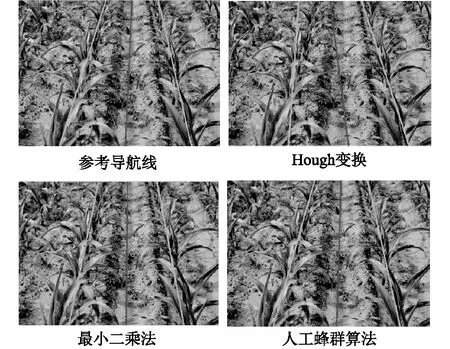
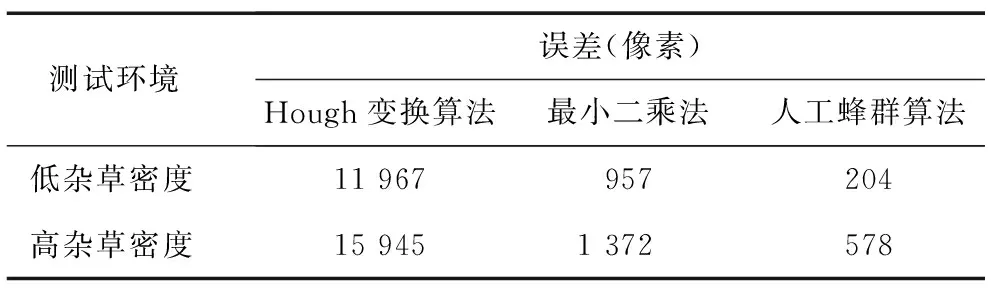
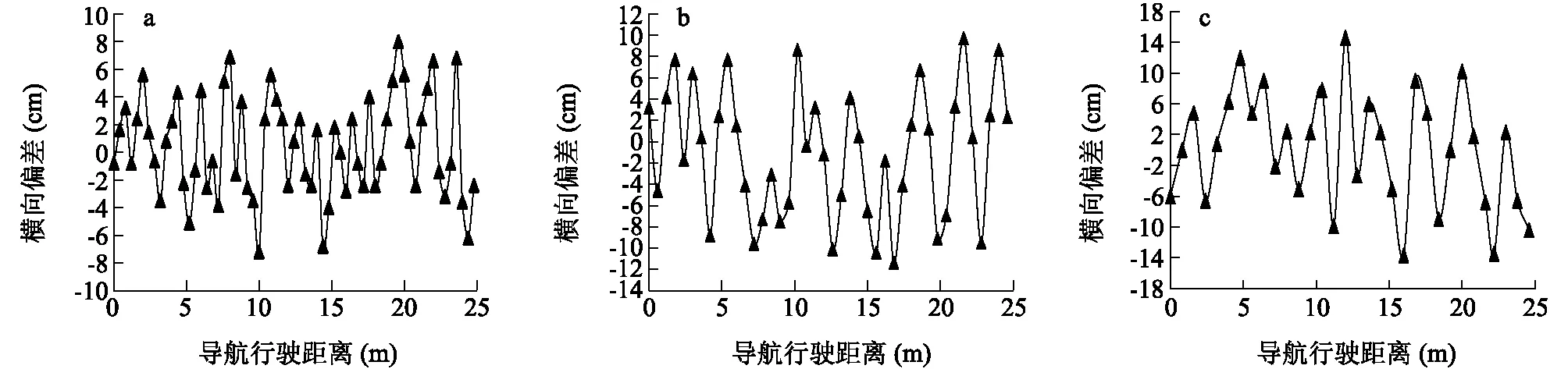
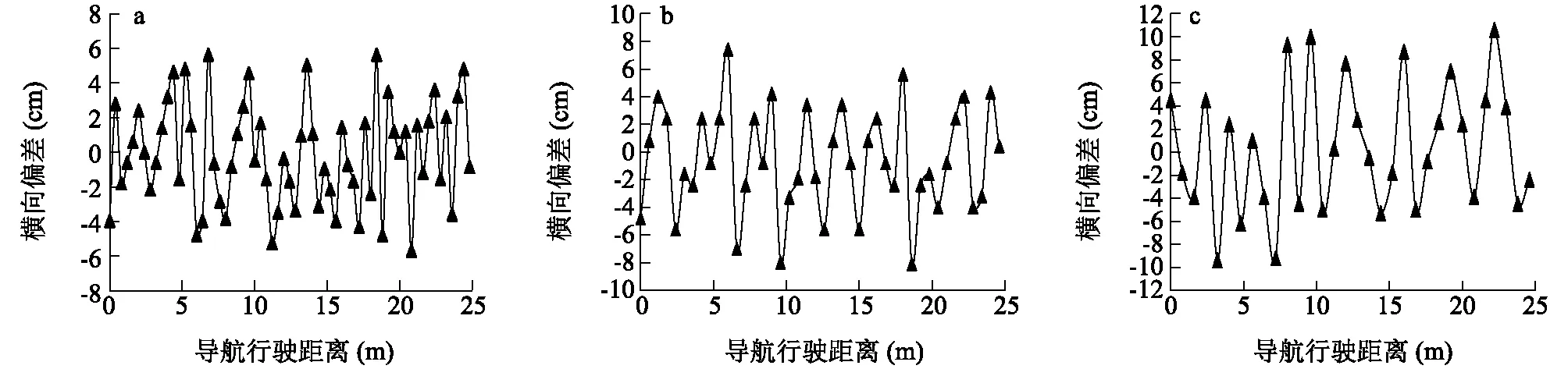
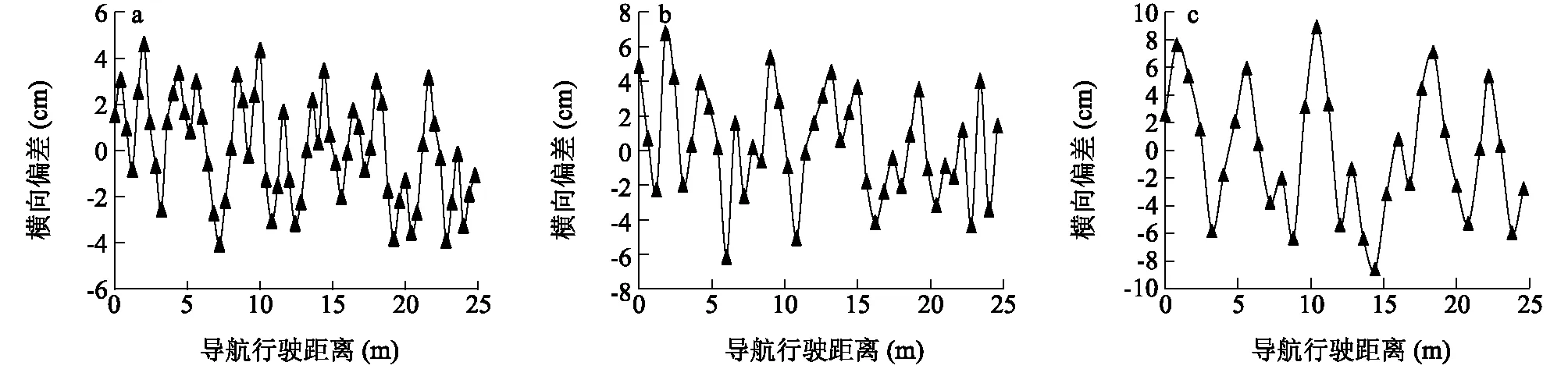
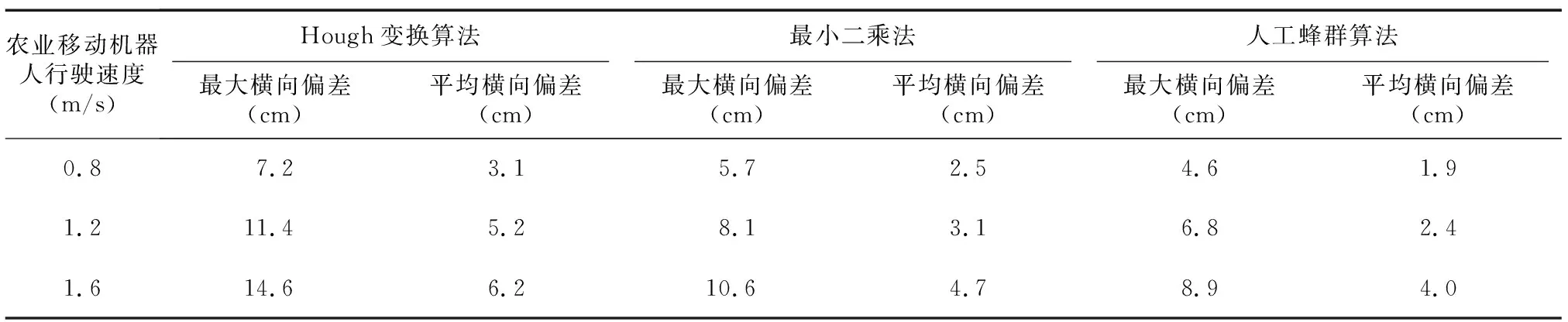
(4)根据公式(1)计算x1、x2处的图像熵f(x1)、f(x2)。如果f(x1)=f(x2),则a_temp=x1,b_temp=x2,返回步骤(3);如果f(x1)>f(x2),则b_temp=x2,返回步骤(3);如果f(x1) 为了测试算法的有效性,分别采用基于图像熵的曝光时间调整方法和曝光时间恒定方法在晴天环境下进行图像采集,在曝光时间恒定方法中,将曝光时间初始化为5 ms,在基于图像熵的曝光时间调整方法中,曝光时间取值范围为[1 ms,10 ms],t_step=1 ms。图1a、图2a为利用2种方法采集的玉米图片,通过2G-R-B颜色因子将彩色图像灰度化并选择Otsu法进行图像分割,结果如图1b、图2b、图1c、图2c所示。根据公式(1)计算得出,图1b的熵为7.26,图2b的熵为7.04,可见图1b的质量优于图2b。由处理结果可以看出,基于图像熵的曝光时间调整方法获得的灰度图像中作物信息清晰、完整且与土壤相比对比度明显,同时二值图像中的绿色作物可以无损地从背景中得以分离,呈现出良好的分割效果;曝光时间恒定方法获得的灰度图像和二值图像中存在作物与土壤对比度不明显、分割信息不完整等问题。 a:原图;b:灰度图;c:二值图。图1 基于图像熵的曝光时间调整条件下图像的采集处理效果Fig.1 Effect of image acquisition and processing under the condition of exposure time adjustment a:原图;b:灰度图;c:二值图。图2 基于曝光时间恒定条件下图像的采集处理效果Fig.2 Effect of image acquisition and processing under the condition of constant exposure time 利用Otsu算法得到的二值图像,虽然可以实现作物与环境背景的有效区分,但是在某些情况下会存在杂草噪声,使作物行直线提取的准确性下降。因此,本研究选择图像形态学处理中的膨胀、腐蚀运算进行滤波去噪处理[20]。图3为作物图像形态学滤波前后的效果。由图3b可以看出,滤波后图像中的杂草噪声被有效滤除,作物行的特征信息损失得很少,得以清晰完整地保留。 a:滤波前图像;b:滤波后图像。图3 图像形态学滤波去噪处理效果Fig.3 Noise-suppressed processing of images by morphological filtering 作物行特征点检测是实现作物行中心线提取的关键环节之一,常规方法是对整幅图像进行特征点检测,然后根据特征点间的距离特性进行聚类处理,不过这种处理方法会造成图像处理算法整体的实时性和抗干扰能力降低[21]。为了提高作物行直线检测的速度和准确性,本研究采用灰度垂直投影法对图像上半部分、下半部分进行投影,根据投影值计算出作物行在图像顶部、底部的位置信息,再通过直线连接形成作物行条形区域(图4a)。在此基础上,利用基于垂直投影的移动窗口法对条形区域内的作物行进行特征点提取[22],将同一条形区域内的特征点归为一类,详见图4b。 a:区域检测;b:特征点提取。图4 作物行区域检测与特征点的提取Fig.4 Regional detection and feature points extraction of crop 人工蜂群算法(Artificial bee colony algorithm,ABC)是一种仿生智能优化算法,算法的最小搜索模型包括蜜源、引领蜂、跟随蜂和侦查蜂4个组成要素及招募蜜蜂、放弃蜜源2个行为[23]。算法中引领蜂、跟随蜂的数量等于蜜源数量,其基本原理如下:设求解的问题维数为D,蜜源位置代表问题的潜在解,蜜源i的位置表示为xi=(xi1,xi2,…,xiD),则ABC算法的数学模型为 xid=xmin,d+rand(0,1)(xmax,d-xmin,d) (4) vid=xid+φ(xid-xjd) (5) (6) 式中,xmin和xmax分别表示搜索空间的上限和下限;d=1,2,…,D,表示解的1个维数;vid表示搜索阶段在蜜源i附近产生的1个新蜜源,j∈(1,2,…,NP),j≠i;φ表示随机数,取值范围为[-1,1];Pi表示跟随蜂选择第i个蜜源的概率;fiti为第i个蜜源适应度;NP为解的数量;当超过设定的循环数后,若蜜源质量仍无法得到提升,则这个蜜源被舍弃,与之对应的引领蜂转变为侦查蜂,侦查蜂按照公式(4)产生新蜜源。 农田作物行在形态上表现为小曲率曲线或者近似直线,其方程可以根据图像中的2个像素点确定。设V为由作物行特征点构成的数据空间,(xi,yi)和(xj,yj)为V中的2个点,则作物行中心线方程可以表示为下式: (7) 统计上述直线上包含的特征点数,将其作为评价直线优劣的标准,通过调整(xi,yi)和(xj,yj)的位置,选择包含特征点数最多的直线作为作物行中心线。在一般情况下,为了提高作物行的直线检测精度,可以将直线上特征点的统计转化为距离直线一定范围(d范围)特征点的统计。因此,作物行中心线提取问题可以看成函数优化问题,即在数据空间V中寻找2个点,使其构成的直线所包含的特征点数最多,将这2个点作为问题的最优解。由于人工蜂群算法可以有效解决函数优化问题,所以作物行的直线提取可以利用蜂群算法实现。相比于Hough变换,基于人工蜂群算法的作物行直线检测方法只需要对图像空间的作物行特征点进行搜索,不需要计算每个像素点到参数空间的投影累加值,具有更高的实时性和计算效率;相比于最小二乘法,人工蜂群算法将距离候选直线一定范围(d范围)特征点的统计值作为适应度,在d取值比较小的情况下,可以使距离作物行直线较远的杂草噪声点不影响真实作物行直线的拟合,使算法具有良好的抗干扰性。用人工蜂群算法进行导航线提取的具体步骤如下: (1)通过对图像进行灰度垂直投影,获取作物行数量(N)及区域范围,如果N≥1(表示图像中至少包括1条作物行),则对条形区域内作物行进行特征点检测,否则结束程序。 (3)初始化作物行计数变量(num)=1,距离阈值(d),蜜源数量(m)(引领蜂和跟随蜂数量与蜜源数量相同),局部搜索最大次数(limit),最大迭代次数(C)。建立适应度函数f=T(T表示距离直线d范围内的特征点数)。 (5)引领蜂根据公式(5)进行邻域搜索,产生新的蜜源(vi),计算新蜜源的适应度。如果vi的适应度大于xi的适应度,则xi=vi,否则xi保持不变。 (6)根据公式(6)计算xi的相关概率(Pi),跟随蜂依据Pi进行蜜源选择。跟随蜂利用公式(5)进行邻域搜索,产生新解vi,计算其适应度。如果vi的适应度大于xi的适应度,则xi=vi,否则xi保持不变。 (7)经过limit次循环后,如果xi的适应度没有改变,则放弃该解,对应的引领蜂转化为侦查蜂,根据公式(4)产生1个新解代替当前的xi。 (8)保存当前最优解,判断是否达到最大迭代次数(C),如果达到则输出最优结果,否则返回步骤(5)。 (9)如果num+1>N,则执行步骤(10),否则num=num+1,返回步骤(4)。 (10)以图像中心线为界,选择其左右两侧距离最近的作物行中心线作为基准,推导出导航线方程。 图5为利用上述算法提取的导航路径效果,其中虚线表示作物行中心线,实线为根据2条相邻作物行中心线计算得到的导航线。可以看出,所获取的作物行中心线与导航路径信息清晰准确。 图5 导航路径的提取效果Fig.5 Extraction effect of navigation path 本研究中的农业移动机器人平台主要由视觉传感器、工业控制计算机、可编程逻辑控制器(PLC)、位移传感器、速度传感器、液压执行机构和导航车辆组成。移动机器人的主要功能是导航除草,其对应的系统结构、试验平台分别如图6、图7所示。 图6 农业移动机器人系统结构框图Fig.6 System structure diagram of agricultural mobile robots 图7 农业移动机器人试验平台Fig.7 Experimental platform of agricultural mobile robots 图像采集设备使用北京凌云光子技术有限公司生产的Blackfly S系列CMOS(Complementary metal oxide semiconductor,互补金属氧化物半导体)相机,输出图像格式为bmp,图像尺寸为640×480像素,帧频为1 s 8帧。工控机采用中国台湾威强电工业电脑有限公司生产的PPC-F22A-H81型工业电脑,中央处理器(CPU)为Intel 酷睿i5-6500四核处理器,内存容量为4 GB,操作系统为Win7;PLC型号为KSC-10,可基于ST(Structured text,结构化文本)语言进行程序设计;速度传感器型号为VB-Z9400,输出信号为方波(50%占空比,即矩形波高电平保持时间与低电平保持时间相同);位移传感器型号为CWY-CB,输出电压范围为 0~5 V(直流电);图像处理程序在VS2015开发环境下基于C语言进行代码设计。 为了测试图像分割效果对光照变化的适应能力,本研究分别利用基于图像熵的曝光时间调整方法(本研究方法)和曝光时间恒定方法,在3种光照度条件下各采集45幅图片(每种光照条件下采集15幅)。在基于图像熵的曝光时间调整方法中,相机曝光时间调整范围为[0.1 ms, 20.0 ms] ,搜索移动步长为0.5 ms;在曝光时间恒定方法中,相机曝光时间设置为10 ms。利用2种方法进行图像采集时,保持相机光圈大小不变。为了评价图像分割质量,本研究采用Meyer等[24]提出的方法,利用图像相对分割错误率对本研究方法和曝光时间恒定方法所对应的分割图像效果进行评估。图像相对分割错误率定义为 (8) 由公式(8)可以看出,在像素一定的条件下,2个分割图像含有的公共像素集(交集)越大,计算得到的相对分割错误率越小,表示2个分割图像间的差异越小;反之,表示2个分割图像间的差异越大。 图8为不同光照环境下2种方法对应二值图像的相对分割错误率对比曲线,其中,EXP_V-EXP_C曲线表示本研究方法对于曝光时间恒定方法的相对分割错误率;EXP_C-EXP_V曲线表示曝光时间恒定方法对于本研究方法的相对分割错误率。由图8a、图8b、图8c可以看出,在不同光照条件下,EXP_C-EXP_V曲线均高于EXP_V-EXP_C曲线,并且随着光照度的增加,相对分割错误率呈现不断上升的态势,这主要是由于光照度越大,曝光时间恒定方法中绿色作物信息损失得越多(图2c),在公共像素集相同的情况下,曝光时间恒定方法对于本研究方法的相对分割错误率越大。 a:1 000~8 000 lx光照度;b:10 000~50 000 lx光照度;c:60 000~90 000 lx光照度。图8 不同光照环境下图像相对分割错误率对比曲线Fig.8 Correlation curves of relative error rate in image segmentation under different illumination conditions 研究结果表明,相比于曝光时间恒定方法,本研究方法在不同光照度下可以使作物信息完整地从土壤背景中分离出来,信息损失较小(图1c),能够有效抑制光照变化对图像处理的影响。不过,当光圈处于随机位置时,采用本研究方法计算最佳曝光时间需要耗费一定时间。为此,在导航路径提取前,先手动调节光圈到最佳位置(以准确完整地分割作物行为准),然后开启曝光时间调整方法,使曝光时间快速调整到最佳状态。在导航过程中自然光照变化缓慢,短时间内图像熵值的变化范围很小,可以设定熵的阈值,每隔一定时间计算1次图像熵,如果图像熵在阈值范围内,就不进行曝光时间调整,如果图像熵超出阈值范围,则在原有最佳曝光时间邻域内进行小范围搜索,快速得到当前的最佳曝光时间,这样算法耗时对整体导航路径检测实时性的影响很小。 本研究采集90幅不同生长阶段并含有杂草噪声的玉米图像(分别在玉米平均高度为18 cm、24 cm、32 cm的3个生长时期各采集30幅),对标准Hough变换算法、标准最小二乘法和人工蜂群算法在导航路径识别的准确性、实时性和适应性3个方面进行对比测试。导航路径识别程序在VS2015软件环境下基于C语言进行设计,处理图像尺寸为640×480像素,检测环节包含图像灰度化、图像分割、作物行区域检测、特征点提取、作物行直线提取和导航路径识别等。为了对算法的抗干扰性进行测试,检测步骤中没有包含形态学滤波环节。在Hough变换算法中,θ∈[-90°,+90°],ρ∈(0像素,800像素)(θ表示直角坐标系下直线和原点间的垂线与x轴正向的夹角,ρ表示直角坐标系下直线到原点的距离),量化精度为1°。在人工蜂群算法中,蜜源数量、引领蜂数量和跟随蜂数量均为30个,局部搜索阈值(limit)=10,最大迭代次数(C)=50,直线距离阈值(d)=2。 由表1可以看出,在不同作物生长阶段,人工蜂群算法准确识别的图像数量多于其他2种算法,表明人工蜂群算法具有更好的准确性和适应性。Hough变换算法和最小二乘法的检测准确率均比人工蜂群算法要低,主要原因是叶片的分散生长和杂草噪声的存在使得Hough变换算法和最小二乘法的检测准确率降低。人工蜂群算法也存在导航路径识别错误的图像,原因是行间存在大面积杂草,造成作物行位置检测失败,从而无法提取作物行直线,不过在此情况下,最小二乘法和Hough变换算法也同样无法准确识别导航路径。准确识别导航路径需要满足导航路径有效识别、导航路径检测准确2个条件,能否有效识别导航路径与作物行位置检测环节有关,而导航路径检测的准确性由导航路径提取算法的性能决定。表1中的3种算法均采用垂直投影法进行作物行位置的检测,由于在30幅图像中有1幅存在由于杂草密度很高而无法有效检测作物行位置信息的情况,所以导航路径的有效识别率为96.6%。在算法实时性方面,Hough变换算法耗时最多,最小二乘法最少,人工蜂群算法介于两者之间,略高于最小二乘法。 表1 玉米不同生长阶段可准确识别的导航路径图像数量与平均耗时 图9、图10为不同杂草密度环境下3种算法的导航路径识别结果。本研究采用人工标注法获取参考导航路径作为评价标准,将用不同算法得到的导航线与参考导航线进行比较,根据对比结果进行分析评价。人工标注参考导航路径的方法如下:选择图像顶部和底部作物中心点,连接2点构成参考作物行中心线,此中心线延长线与图像顶边和底边分别产生交点;编写程序对顶边和底边像素点进行逐个标记,记录标记点与交点重合时的坐标,基于2个交点坐标计算出作物行中心线方程,根据相邻2条作物行中心线推导出参考导航路径方程。 图9 高密度杂草环境下导航路径的提取Fig.9 Extraction of navigation path under the condition of high weeds density 图10 低密度杂草环境下导航路径的提取Fig.10 Extraction of navigation path under the condition of low weeds density 从图9、图10还可以看出,Hough变换算法在不同杂草密度情况下提取的导航路径相对于参考导航路径均存在明显偏差,最小二乘法与人工蜂群算法提取的导航路径与参考导航路径接近,不过在高杂草密度条件下由于受到杂草噪声的影响,最小二乘法对左侧作物行的检测结果存在一定偏差,从而对导航路径的检测精度产生一定影响。为定量分析检测结果与参考路径之间的误差,本研究选择不同算法导航线上的5个像素点(图像顶边、底边与距离底边1/4、1/2、3/4高度的像素点),计算这些点到参考导航路径的距离平方和。 由表2可以看出,在不同杂草密度条件下,人工蜂群算法提取的导航路径与参考导航路径的参数(截距、斜率)差距最小;表3中Hough变换算法提取的导航路径与参考导航路径之间的误差最大,最小二乘法次之,说明人工蜂群算法对于杂草的抗干扰能力强于另外2种算法。 试验结果表明,本研究提出的基于人工蜂群算法的导航线识别方法可以快速准确地识别导航基准线,与Hough变换算法相比具有良好的实时性与准确性,与最小二乘法相比对杂草噪声不敏感,具有较强的抗干扰能力。 为了评价导航路径识别算法的动态性能,利用拖拉机导航平台分别在0.8 m/s、1.2 m/s和1.6 m/s速度条件下进行路径跟踪试验。试验地玉米田,植株平均高度约为30 cm,行间距为60 cm,路径跟踪长度为25 m。将高精度全球定位系统(GPS)安装在拖拉机顶部中心位置用于采集系统运动轨迹,将摄像头安装于拖拉机前端配重架上,GPS与摄像头均位于拖拉机中轴线上,GPS定位数据输出频率为2 Hz。试验前用GPS从导航路径起点位置开始,每隔一定距离采集1个点,一直到终点,可以获得跟踪路径的参考信息。为了保证导航数据的有效性,对3种速度跟踪试验各重复5次,选择各速度条件下横向偏差最大的1次进行分析。 表2 不同算法导航线参数的对比 由图11、图12、图13可以看出,在同一速度条件下,3种导航线提取算法的横向偏差均以0为基准进行上下波动,其中Hough变换算法的波动范围最大,最小二乘法次之,人工蜂群算法最小。由表4可以看出,在3种导航速度条件下,Hough变换算法与最小二乘法的最大横向偏差和平均横向偏差均高于人工蜂群算法,主要原因是杂草噪声干扰使这2种算法拟合的导航路径精度降低,导致跟踪误差增加。试验结果表明,在动态环境中,本研究提出的基于人工蜂群算法提取的导航基准线可以使农业导航机器人快速准确地对导航路径进行跟踪,具有良好的动态特性。 表3 不同算法导航路径对于参考导航路径的误差 a:农业移动机器人行驶速度0.8 m/s;b:农业移动机器人行驶速度1.2 m/s;c:农业移动机器人行驶速度1.6 m/s。图11 Hough变换算法提取的导航路径跟踪结果Fig.11 Tracking results of guidance line by Hough transform algorithm a:农业移动机器人行驶速度0.8 m/s;b:农业移动机器人行驶速度1.2 m/s;c:农业移动机器人行驶速度1.6 m/s。图12 最小二乘法提取的导航路径跟踪结果Fig.12 Tracking results of guidance line by least square algorithm a:农业移动机器人行驶速度0.8 m/s;b:农业移动机器人行驶速度1.2 m/s;c:农业移动机器人行驶速度1.6 m。图13 人工蜂群算法提取的导航路径跟踪结果Fig.13 Tracking results of guidance line by artificial bee colony algorithm 表4 3种导航路径识别算法在不同农业移动机器人行驶速度下导航路径跟踪误差 本研究针对自然环境下基于机器视觉的农业移动机器人,拟解决其图像处理易受光照影响的问题,提出了基于图像熵的相机曝光时间调整方法,使图像质量达到最优,以提高图像分割效果对光照变化的适应性;为了解决常规导航路径识别算法存在的实时性差、准确性低等不足,提出了基于人工蜂群算法的作物行中心线检测与导航路径识别方法,将作物行中心线提取问题转化为函数优化问题。试验结果表明:(1)对于自然光照变化的农田作业环境,基于图像熵的相机曝光时间调整方法可以使作物信息清晰完整地从背景中分离出来,具有较小的相对分割错误率,为后期进行导航路径的准确识别提供了条件。(2)基于人工蜂群算法的导航路径提取方法可快速、准确地检测导航路径,相比常规检测方法具有消耗时间少、抗干扰性强等特点。对于1幅640×480像素的图像,导航路径提取的平均耗时为76.4 ms。在3种不同导航速度条件下,最大横向偏差不超过8.9 cm,可以满足农业移动机器人行间导航除草作业的精度要求。
2 形态学去噪与作物行特征点检测
2.1 图像的形态学处理
2.2 作物行区域检测与特征点的提取
3 基于人工蜂群算法的导航路径识别
3.1 人工蜂群算法的基本原理
3.2作物行中心线的检测与导航路径的识别

4 结果与分析

4.1 光照适应性试验

4.2 导航路径识别算法对比测试
4.3 导航路径识别算法动态性能测试

5 结 论
